1.本发明涉及核工程技术领域,具体涉及一种用于密封箱体内的容器转运地轨装置。
背景技术:
2.在具有放射性或极端恶劣环境的密闭空间中进行转运操作时,通常需要采用自动化转运设备以减少人员介入。然而,目前采用的自动化转运设备的所有驱动元件均位于密封空间内,存在可靠性较低、维护困难等问题。
技术实现要素:
3.本发明要解决的技术问题是针对现有技术存在的不足,提供一种用于密封箱体内的容器转运地轨装置,可提高可靠性、便于维护。
4.本发明提供一种用于密封箱体内的容器转运地轨装置,其技术方案如下:
5.一种用于密封箱体内的容器转运地轨装置,包括夹持器和驱动组件,所述驱动组件包括第一驱动模组、第二驱动模组、以及第三驱动模组,所述第一驱动模组包括第一驱动器和第一运动转换单元,所述第一驱动器设于密封箱体的外部,用于驱动所述第一运动转换单元旋转,所述第一运动转换单元处于所述密封箱体的内部并与第一驱动器相连,用于将自身的旋转运动转换为第一方向上的直线运动;
6.所述第二驱动模组包括第二驱动器和第二运动转换单元,所述第二驱动器设于密封箱体的外部,用于驱动所述第二运动转换单元旋转,所述第二运动转换单元处于所述密封箱体的内部并与第二驱动器相连,且固定在所述第一运动转换单元上,用于将自身的旋转运动转换为第二方向上的直线运动,所述第二方向与所述第一方向垂直;
7.所述第三驱动模组包括第三驱动器和第三运动转换单元,所述第三运动转换单元处于所述密封箱体的内部并与第三驱动器相连,且固定在所述第二运动转换单元上,第三驱动器设于密封箱体内部,用于驱动所述第三运动转换单元旋转,第三运动转换单元用于将自身的旋转运动转换为第三方向上的直线运动,所述第三方向与所述第一方向、所述第二方向均垂直;
8.所述夹持器处于所述密封箱体内并固定在所述第三运动转换单元上,用于夹持容器。
9.优选的是,所述第一运动转换单元包括第一丝杠螺母副,所述第一丝杠螺母副包括第一丝杠和第一螺母座,所述第一丝杠与第一驱动器相连,并沿所述第一方向设置,所述第一螺母座与第一丝杠相配合,并随着第一丝杠的旋转而在第一丝杠上移动,第一螺母座上固设有第一滑块;
10.所述第二运动转换单元包括第二丝杠螺母副,所述第二丝杠螺母副固设于所述第一滑块上,其包括第二丝杠和第二螺母座,所述第二丝杠沿所述第二方向设置,所述第二螺母座与第二丝杠相配合,并随着第二丝杆旋转而在第二丝杠上移动,第二螺母座上固设有
第二滑块;
11.所述第三运动转换单元包括第三丝杠螺母副,所述第三丝杠螺母副包括第三丝杠和第三螺母座,所述第三螺母座固设于所述第二滑块上,所述第三丝杠设于第三螺母座上并与所述第三驱动器相连,且沿所述第三方向设置,第三驱动器驱动第三丝杠旋转而使第三丝杠沿所述第三方向运动,所述夹持器固设于所述第三丝杠上。
12.优选的是,所述第一驱动器和所述第二驱动器处于所述密封箱体外部的同一侧,且所述第一驱动器和所述第二驱动器输出的旋转运动所在的旋转平面为同一平面或者平行平面,所述第二运动转换单元还包括动力传递机构,所述动力传递机构包括滚珠花键副、第一齿轮、以及第二齿轮,所述滚珠花键副包括花键轴和花键套,所述花键轴沿所述第一方向设置,且所述花键轴与所述第二驱动器的输出端相连,所述花键套套设于所述花键轴上,且所述花键套与所述第一滑块活动连接,所述第一齿轮固设于所述花键套上,所述第二齿轮固设于所述第二丝杠上并与所述第一齿轮相啮合,其中,所述第一齿轮与所述第二齿轮分别所在的旋转平面相互垂直。
13.优选的是,所述第一齿轮和所述第二齿轮均为锥齿轮。
14.优选的是,所述第三驱动模组还包括手轮,所述手轮与所述第三丝杠相连,以使两者同步转动。
15.优选的是,本装置还包括控制组件,所述控制组件包括控制器、第一检测器、第二检测器、以及第三检测器,所述第一检测器与所述控制器电连接,用于实时检测所述第一滑块的位置,并根据实时检测到的第一滑块的位置发送第一位置信号给控制器;
16.所述第二检测器与所述控制器电连接,用于实时检测所述第二滑块的位置,并根据实时检测到的第二滑块的位置发送第二位置信号给控制器;
17.所述第三检测器与所述控制器电连接,用于实时检测所述夹持器的位置,并根据实时检测到的夹持器的位置发送第三位置信号给控制器;
18.所述控制器与所述第一驱动器、所述第二驱动器、以及所述第三驱动器分别电连接,用于根据输入的目标位置分别控制第一驱动器、第二驱动器以及第三驱动器工作,以及,根据实时接收的第一位置信号、第二位置信号以及第三位置信号分别控制第一驱动器、第二驱动器以及第三驱动器停止工作。
19.优选的是,所述第一驱动器、所述第二驱动器、以及第三驱动器均为伺服电机。
20.优选的是,所述夹持器与第三丝杠可拆卸连接,所述第一方向和第三方向设于水平面内,第二方向处于竖直平面内。
21.本发明的用于密封箱体内的容器转运地轨装置,不仅可以方便进行维护,还可以降低密封箱体内的放射性或极端恶劣的环境对装置工作性能及使用寿命的影响,可适用于内部空间为放射性或极端恶劣的环境的密封箱体中的容器转运,此外,本装置结构简单,操作方便,可降低生产、使用成本。
附图说明
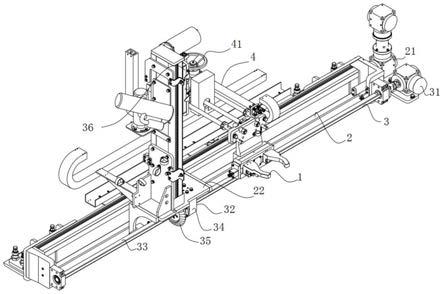
22.图1为本发明实施例中用于密封箱体内的容器转运地轨装置的结构示意图;
23.图2为本发明实施例中用于密封箱体内的容器转运地轨装置的另一个角度的结构示意图;
24.图3为本发明实施例中用于密封箱体内的容器转运地轨装置的侧视图。
25.图中:1
‑
夹持器;2
‑
第一驱动模组;21
‑
第一驱动器;22
‑
第一滑块;3
‑
第二驱动模组;31
‑
第二驱动器;32
‑
动力传递机构;33
‑
花键轴;34
‑
花键套;35
‑
第一齿轮;36
‑
第二滑块;37
‑
第二齿轮;4
‑
第三驱动模组;41
‑
手轮;42
‑
第三驱动器。
具体实施方式
26.为使本领域技术人员更好的理解本发明的技术方案,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明的保护范围。
27.在本发明的描述中,需要说明的是,属于“上”等指示方位或位置关系是基于附图所示的方位或者位置关系,仅是为了便于和简化描述,而并不是指示或者暗示所指的装置或者元件必须设有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或者暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
29.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“连接”、“设置”、“安装”、“固定”等应做广义理解,例如可以是固定连接也可以是可拆卸地连接,或者一体地连接;可以是直接相连,也可以是通过中间媒介间接相连,还可以是两个元件内部的连通。对于本领域技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
30.实施例1
31.如图1、图2、图3所示,本实施例公开一种用于密封箱体内的容器转运地轨装置,包括夹持器1和驱动组件,驱动组件包括第一驱动模组2、第二驱动模组3、以及第三驱动模组4,其中:第一驱动模组2包括第一驱动器21和第一运动转换单元,第一驱动器21设于密封箱体的外部,用于驱动第一运动转换单元旋转,第一运动转换单元处于密封箱体的内部并与第一驱动器21相连,用于将自身的旋转运动转换为第一方向上的直线运动;第二驱动模组3包括第二驱动器31和第二运动转换单元,第二驱动器31设于密封箱体的外部,用于驱动第二运动转换单元旋转,第二运动转换单元处于密封箱体的内部并与第二驱动器31相连,且固定在第一运动转换单元上,用于将自身的旋转运动转换为第二方向上的直线运动,第二方向与第一方向垂直;第三驱动模组4包括第三驱动器和第三运动转换单元,第三运动转换单元处于密封箱体的内部并与第三驱动器相连,且固定在第二运动转换单元上,第三驱动器设于密封箱体的内部,用于驱动第三运动转换单元旋转,第三运动转换单元用于将自身的旋转运动转换为第三方向上的直线运动,第三方向与第一方向、第二方向均垂直;夹持器1处于密封箱体内并固定在第三运动转换单元上,用于夹持容器,从而通过第一驱动模组2、第二驱动模组3、以及第三驱动模组4的驱动作用使夹持器夹持着容器在密封箱体内移动,实现密闭箱体内的容器转运。
32.相比于现有技术,本实施例装置的第一驱动器21和第二驱动器31设于密封箱体的
外部,不仅可以方便进行维护,还可以提升本装置的可靠性,即使密封箱体的内部空间为放射性或极端恶劣的环境,也可以避免密封箱体内的气氛对第一驱动器21、第二驱动器31的工作性能及使用寿命的影响。也就是说,本装置不仅可以适用于普通的密闭箱体内的容器转运,还可以适用于内部空间为放射性或极端恶劣的环境的密封箱体中的容器转运。
33.需要注意的是,本实施例装置中的夹持器除了可以夹持容器,还可以用于夹持其他物体,也就是说,本装置除了可以实现容器转运,也可以用于其他物体的转运,而不限于转运容器。
34.本实施例中,第一运动转换单元包括第一丝杠螺母副,第一丝杠螺母副包括第一丝杠和第一螺母座,第一丝杠与第一驱动器21相连,并沿第一方向设置,第一驱动器21驱动第一丝杠旋转,第一螺母座与第一丝杠相配合,比如,第一螺母座设于第一丝杠上,两者可转动相连而进行配合,第一螺母座随着第一丝杠的旋转而在第一丝杠上沿第一方向移动,第一螺母座上固设有第一滑块22,第一螺母座和第一滑块22可以是一体化结构,也可以是通过螺栓等连接方式相连;
35.第二运动转换单元包括第二丝杠螺母副,第二丝杠螺母副通过螺钉或螺栓等紧固件固设于第一滑块22上,其包括第二丝杠和第二螺母座,第二丝杠沿第二方向设置,第二螺母座与第二丝杠上相配合,比如,第二螺母座设于第二丝杠上,两者可转动相连而进行配合,第二螺母座随着第二丝杠旋转而在第二丝杠上沿第二方向移动,第二螺母座上固设有第二滑块36;
36.第三运动转换单元包括第三丝杠螺母副,第三丝杠螺母副包括第三丝杠和第三螺母座,第三螺母座固设于第二滑块36上,第三丝杠可转动地设于第三螺母座上并与第三驱动器42相连,且沿第三方向设置,第三驱动器42驱动第三丝杠旋转而使第三丝杠沿第三方向运动,夹持器1固设于第三丝杠上,随第三丝杠在第三方向上移动。
37.本实施例中,通过设置第一驱动模组2,将第一驱动器21输出的旋转运动转换为沿第一方向上的直线运动,从而实现夹持器1在第一方向上移动,通过设置第二驱动模组3,将第二驱动器31输出的旋转运动转换为沿第二方向上的直线运动,从而实现夹持器1在第二方向上移动,通过设置第三驱动模组4,将第三驱动器输出的旋转运动转换为沿第三方向上的直线运动,从而实现夹持器1在第三方向上移动,进而实现密闭箱体内的容器转运。
38.本实施例中,夹持器1采用模块化设计,其通过螺栓固定、快拆结构等方式与第三丝杠可拆卸相连,以便整体拆装。
39.本实施例中,第一方向和第三方向设于水平面内,第二方向处于竖直平面内。
40.本实施例中,第一驱动器21和第二驱动器31优选处于密封箱体外部的同一侧,这样可以使得本装置结构更合理,更有利于操作和维护,且第一驱动器21和第二驱动器31输出的旋转运动所在的旋转平面为同一平面或者平行平面,第二运动转换单元还包括动力传递机构32,动力传递机构32包括滚珠花键副、第一齿轮、以及第二齿轮,滚珠花键副包括花键轴33和花键套34,其中:花键轴33沿第一方向设置,其与第一丝杠平行,花键轴33与第二驱动器31的输出端相连,花键套34套设于花键轴33上,花键套34与第一滑块22通过滑动轴承或滚动轴承等轴承可转动相连;第一齿轮35固设于花键套34上,第二齿轮37固设于第二丝杠上,并与第一齿轮35相啮合,第一齿轮与第二齿轮分别所在的旋转平面相互垂直,第二驱动器31输出旋转动力而驱动花键轴33进行旋转,进而带动花键套34及第一齿轮35旋转,
再通过第二齿轮37的啮合而带动第二丝杠旋转。第一驱动器21输出旋转动力时,第二丝杠螺母副、第二齿轮37、花键套34、第一齿轮35均随第一滑块22沿第一方向直线运动,花键轴33不旋转。滚珠花键副既可相对滑动,又可同步转动,当第二驱动器31输出旋转动力时,驱动花键轴33旋转,并带动花键套34旋转,再通过与花键套34固连的第一齿轮35和与第二丝杠固连的第二齿轮37将水平方向的动力输入转换为第二丝杠螺母副的竖直方向运动(即第二方向上的直线运动),可以方便将第二驱动器31设置在密封箱体的外部,且具有较高的精度。
41.本实施例中,第一齿轮35和第二齿轮37均优选为锥齿轮。两者的旋转方向相互垂直。
42.在一些实施方式中,第三驱动模组4还包括手轮41,手轮41与第三丝杠通过键连接等方式相连,以使两者同步转动,并且,手轮41上可设有花纹,以便操作。具体来说,花纹可以是凹入手轮41内,也可以从手轮41上向外凸出。通过设置手轮41,可以使第三驱动模组4具有手动操作能力,在动力失效情况下仍可手动完成转运操作,进一步优化了本装置的性能。
43.在一些实施方式中,本装置还包括控制组件(图中未示出),控制组件包括控制器、第一检测器、第二检测器、以及第三检测器,其中:第一检测器与控制器电连接,用于实时检测第一滑块22的位置,并根据实时检测到第一滑块22的位置发送第一位置信号给控制器;第二检测器与控制器电连接,用于实时检测第二滑块36的位置,并根据实时检测到第二滑块36的位置发送第二位置信号给控制器;第三检测器与控制器电连接,用于实时检测夹持器1的位置,并根据实时检测到夹持器1的位置发送第三位置信号给控制器;控制器与第一驱动器21、第二驱动器31、以及第三驱动器分别电连接,用于根据输入的容器需达到的目标位置分别控制第一驱动器21、第二驱动器31、以及第三驱动器进行工作,以及,根据实时接收到的第一位置信号、第二位置信号、以及第三位置信号分别控制第一驱动器21、第二驱动器31、以及第三驱动器停止工作。
44.在一些实施方式中,第一驱动器21、第二驱动器31、以及第三驱动器均优选为伺服电机,伺服电机具有良好的驱动性能,可提高本装置的精度。
45.下面对本实施例装置的工作过程进行详述,具体如下:
46.假设容器要转运的目标位置用坐标(x,y,z)表示,其中,第一运动方向为x轴方向,第二运动方向为z轴方向,第三运动方向为y轴方向,夹持器1夹持住容器,第一驱动器21启动,以驱动第一丝杠进行旋转,从而使第一螺母座在第一方向上运动,并带动夹持器在第一方向上移动,同时,第一检测器实时检测夹持器的实时位置,并根据实时检测到的夹持器位置发送第一位置信息给控制器;
47.当夹持器移动到达x坐标位置时,第一驱动器21停止工作,第二驱动器31启动,以驱动花键轴33进行旋转,从而带动第二丝杠旋转,进而使第二螺母座在第二方向上运动,并带动夹持器在第二方向上移动,同时,第二检测器实时检测夹持器的实时位置,并根据实时检测到的夹持器位置发送第二位置信息给控制器;
48.当夹持器移动到达z坐标第二指定位置时,第二驱动器31停止工作,第三驱动器启动,以驱动第三丝杠进行旋转,第三丝杠与第三螺母座相配合,使得第三丝杠在第三方向上运动,并带动夹持器在第三方向上移动,同时,第三检测器实时检测夹持器的实时位置,并
根据实时检测到的夹持器位置发送第三位置信息给控制器,当夹持器移动到达y坐标位置时,第三驱动器停止工作,并使夹持器1放下容器,容器转运完成。
49.本实施例的用于密封箱体内的容器转运地轨装置,不仅可以方便进行维护,还可以降低密封箱体内的放射性或极端恶劣的环境对装置工作性能及使用寿命的影响,可适用于内部空间为放射性或极端恶劣的环境的密封箱体中的容器转运,此外,本装置结构简单,操作方便,可降低生产、使用成本。
50.可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。