技术特征:
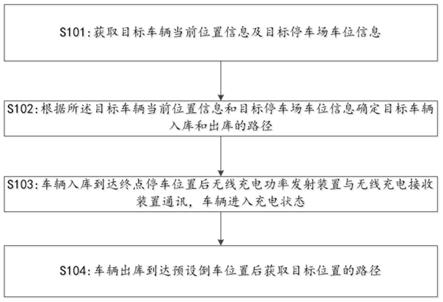
1.一种自动驾驶车辆无线充电混合式路径规划的方法,入库区域内预设位置设置有无线充电功率发射装置,所述车辆底面安装有无线充电接收装置,其特征在于,所述方法包括:获取目标车辆当前位置信息及目标停车场车位信息;根据所述目标车辆当前位置信息和目标停车场车位信息确定目标车辆入库和出库的路径;车辆入库到达终点停车位置后无线充电功率发射装置与无线充电接收装置通讯,车辆进入充电状态;车辆出库到达预设倒车位置后获取目标位置的路径。2.根据权利要求1所述的方法,其特征在于,所述目标停车场车位的中心线方向上且在停车线的预设位置设有第一传感器和第二传感器,在目标车辆入库后所述第二传感器能够采集近邻车尾部的信息;根据所述目标车辆当前位置信息和目标停车场车位信息确定目标车辆入库和出库的路径的方法包括:根据所述目标车辆当前位置信息判断目标车辆是否为入库,如是,获取目标车辆当前位置至预设入库的准备位置的第一路径,并根据所述第一传感器和第二传感器采集的信息确定第二路径,或是,通过预先采集的路径作为第二路径,所述第二路径用于目标车辆从第一路径的终点开入车库中所述第二传感器的位置或近邻所述第二传感器的位置处,或是,预先采集的路径的终点,进行充电,如否,则目标车辆出库,获取所述第一传感器和第二传感器采集信息,或,以所述预先采集的路径作的方式确定第三路径,且目标车辆完成第三路径时,获取第三路径终点位置至预设地点位置的第四路径。3.根据权利要求2所述的方法,其特征在于,获取目标车辆当前位置至预设入库的准备位置的第一路径的方法包括:使用混合a星法获取目标车辆从当前位置至预设入库的准备位置的第一路径,并在预设时间段判断目标车辆是否到达所述预设入库的准备位置,如是,获取所述第二路径,如否,重新获取目标车辆从当前位置至预设入库的准备位置的第一路径第五路径,或,远程控制目标车辆行驶至所述预设入库的准备位置,并获取所述第二路径。4.根据权利要求3所述的方法,其特征在于,所述第二路径为纵向直线段,获取所述第二路径的方法包括:获取目标车辆在到达所述预设入库的准备位置信息,并判断当前的所述预设入库的准备位置信息与所述第二路径的延长线是否满足预设范围的偏移,如是,按所述第二路径进行入库并在入库到预设终点位置后进行充电,如否,对所述第二路径进行修正,避免目标车辆的车轮压无线充电功率发射装置。5.根据权利要求2所述的方法,其特征在于,获取所述第一传感器和第二传感器采集信息确定第三路径,且目标车辆完成第三路径时,获取第三路径终点位置至预设地点位置的第四路径的方法包括:获取所述第一传感器和第二传感器采集信息确定第三路径,所述第一传感器位置为出库准备位置,判断目标车辆在获取所述第三路径后是否在预设时间段到达所述出库准备位置,如否,获取所述出库准备位置信息及目标地点位置,目标车辆根据混合a星法生成所述
第三路径进行行驶,如否,控制目标车辆行至至所述出库准备位置后获取所述第三路径进行行驶。6.根据权利要求1所述的方法,其特征在于,获取目标停车场车位信息的方法为gps采集法、车辆轨迹记录法或3d点云绘制法。7.一种自动驾驶车辆无线充电混合式路径规划的系统,入库区域内预设位置设置有无线充电功率发射装置,所述车辆底面安装有无线充电接收装置,其特征在于,所述系统包括:获取单位,用于获取目标车辆当前位置信息及目标停车场车位信息;计算单元,用于根据所述目标车辆当前位置信息和目标停车场车位信息确定目标车辆入库和出库的路径;车辆入库到达终点停车位置后无线充电功率发射装置与无线充电接收装置通讯,车辆进入充电状态;车辆出库到达预设倒车位置后获取目标位置的路径。8.一种自动驾驶车辆无线充电混合式路径规划的硬件,入库区域内预设位置设置有无线充电功率发射装置,所述车辆底面安装有无线充电接收装置,其特征在于,包括:存储器,用于存储非暂时性计算机可读指令;以及处理器,用于运行所述计算机可读指令,并被配置为:获取目标车辆当前位置信息及目标停车场车位信息;根据所述目标车辆当前位置信息和目标停车场车位信息确定目标车辆入库和出库的路径;车辆入库到达终点停车位置后无线充电功率发射装置与无线充电接收装置通讯,车辆进入充电状态;车辆出库到达预设倒车位置后获取目标位置的路径。
技术总结
本发明的自动驾驶车辆无线充电混合式路径规划的方法,属于汽车自动充电方法的技术领域。该方法包括,获取目标车辆当前位置信息及目标停车场车位信息;根据所述目标车辆当前位置信息和目标停车场车位信息确定目标车辆入库和出库的路径;车辆入库到达终点停车位置后无线充电功率发射装置与无线充电接收装置通讯,车辆进入充电状态;车辆出库到达预设倒车位置后获取目标位置的路径。本发明旨在实现目标车辆的自动入库并自动充电,不需要人为干预,真正实现了自动驾驶车辆的充电自动化和无人化。人化。人化。
技术研发人员:张洪冬 张相 熊祺 张剑
受保护的技术使用者:北京超星未来科技有限公司
技术研发日:2021.09.14
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。