1.本发明涉及驻车支援装置及驻车支援装置的控制方法。
背景技术:
2.作为有关自动驻车的技术,存在专利文献1。
3.专利文献1的摘要中记载了,“驻车框位置获取部21从车载的摄像头3~6的图像获取一个或多个驻车框位置。评价部24对驾驶者针对多个驻车路径的操作负担进行评价,驻车路径选择部25基于该评价结果,选择驾驶者的操作负担最小的驻车路径,并显示于车载监视器13”。
4.在该专利文献1中,“所述驻车路径选择机构选择前进后退切换次数为最小的驻车路径”及“所述驻车路径选择机构在前进后退切换次数最小的驻车路径为多个的情况下,从前进后退切换次数最小的驻车路径中选择转向的操作量最小的驻车路径”。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2011
‑
46335号公报
技术实现要素:
8.发明要解决的课题
9.在专利文献1的技术中,在获取到多个驻车框的情况下,分别生成到达各驻车框的驻车路径,并从中生成驾驶者的操作负担为最小的驻车路径。因此,在仅获取到1个驻车框的情况下,存在发生成为左右舵角大的驻车路径、前进后退切换次数多的驻车路径的情况而影响乘员的乘坐感受的可能。
10.另外,在专利文献1中,使驻车路径的曲线部分成为将基本回旋曲线相似放大的路径。因此,曲线部分的曲率半径依赖于相似放大率,无法为了改善乘坐感受等而使曲率半径增大。
11.本发明目的在于提供能够确定有利于改善乘坐感受、舒适性的驻车路径的驻车支援装置及驻车支援装置的控制方法。
12.用于解决课题的手段
13.本发明的一方案为一种驻车支援装置,其特征在于,包括:周边识别部,其识别车辆周边的信息;驻车区域检测部,其使用所述周边识别部的识别结果检测所述车辆能够驻车的驻车区域;驻车路径计算部,其使用所述车辆的信息和所述周边识别部的识别结果,作为使所述车辆停于所述驻车区域的驻车路径,计算使所述驻车路径中包含的圆弧的曲率半径不同的多种模式的驻车路径;以及驻车路径选择部,其从所述多种模式的驻车路径中选择所述车辆从前进到后退或从后退到前进的改变行进方向的驾驶操作的次数最少且所述圆弧的曲率半径最大的驻车路径。
14.发明效果
15.根据本发明,能够确定有利于改善乘坐感受、舒适性的驻车路径。
附图说明
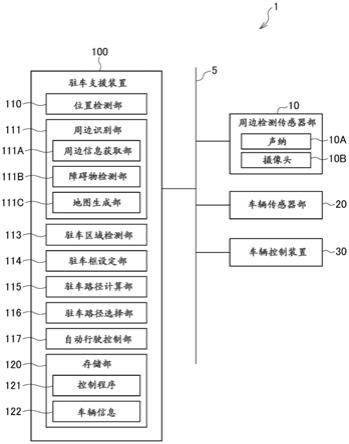
16.图1是示出搭载有本发明实施方式的驻车支援装置的车辆的构成的图。
17.图2是驻车区域的说明图。
18.图3是驻车支援处理的流程图。
19.图4是驻车路径的说明图。
20.图5是比较例的说明图。
21.图6是本发明实施例的说明图。
22.图7是变形例的驻车支援处理的流程图。
23.附图标记说明
24.1 车辆
25.2、3 他车
26.5 车载网络
27.10 周边检测传感器部
28.10a 声纳
29.10b 摄像头
30.20 车辆传感器部
31.30 车辆控制装置
32.100 驻车支援装置
33.110 位置检测部
34.111 周边识别部
35.111a 周边信息获取部
36.111b 障碍物检测部
37.111c 地图生成部
38.113 驻车区域检测部
39.114 驻车框设定部
40.115 驻车路径计算部
41.116 驻车路径选择部
42.117 自动行驶控制部
43.120 存储部
44.121 控制程序
45.122 车辆信息
46.q 驻车区域
47.r 曲率半径
48.ra 曲率半径r的上限值
49.rb 曲率半径r的下限值
50.d1、d2 驻车路径
51.c1、c2 沿着驻车路径中的圆弧的圆
52.p1、p2 圆的中心
53.dc、dca、曲线
54.dcb 圆弧
55.cl1、cl2、cl1a、cl2a、cl1b、cl2b 回旋曲线
具体实施方式
56.以下,参照附图说明本发明的实施方式。
57.图1是示出搭载有本实施方式的驻车支援装置100的车辆1的构成的图。
58.车辆1包括周边检测传感器部10、车辆传感器部20、车辆控制装置30及驻车支援装置100,这些部分借助can(controller area network:控域网络)总线等车载网络5以能够进行数据通信的方式连接。
59.周边检测传感器部10具备用于检测车辆1周边的信息的各种传感器,将检测结果(输出)向驻车支援装置100输出。以下,将周边的信息称为“周边信息”。
60.周边信息包含车辆1的周边存在的物体的信息,该物体为例如障碍物、划分车辆1的驻车区域的分界线等。障碍物为妨碍车辆1行驶的各种物体。作为障碍物的典型例子,能够举出柱、壁、灭火栓等建造物、驻车中、行驶中的他车及行人。
61.本实施方式的周边检测传感器部10包括声纳10a及摄像头10b。
62.声纳10a为利用声波检测周边的障碍物并测定该障碍物与车辆1之间的距离的测距传感器。声纳10a设置在车辆1的左右等,能够检测车辆1欲要驻车的驻车区域q周围的物体等。需要说明的是,也可以取代声纳10a而使用雷达、激光雷达(lidar)等其他测距传感器。
63.摄像头10b作为对车辆1周边的图像进行拍摄的拍摄部发挥功能。摄像头10b设置为能够拍摄车辆1的前后左右,能够拍摄车辆1周边存在的驻车区域q。需要说明的是,摄像头10b既可以是分别配置在车辆1的前后左右等的摄像头,也可以是能够使用一台来拍摄前后左右等的摄像头。
64.车辆传感器部20具有获取车辆1各部分的信息的传感器,能够检测该车辆1的行驶状态及自律航法(航位推测)所需的各种信息。例如,车辆传感器部20具有陀螺仪传感器、加速度传感器、车速传感器、检测车辆1的操舵角的舵角传感器等。
65.车辆控制装置30通过对车辆1的操舵装置、驱动装置及制动控制装置进行控制,从而基于通过驻车支援装置100所计算的后述驻车路径使车辆1自行移动(自动行驶)。车辆控制装置30具备执行该控制的计算机(例如ecu(electronic conrtol unit:电子控制单元))。需要说明的是,操舵装置包含使车辆1的操舵轮操舵的致动器。
66.另外,驱动装置包含对车辆1的驱动轮的驱动力进行调节的致动器。在车辆1的动力源为发动机的情况下,驱动装置的致动器为风门调节器。在动力源为马达的情况下,驱动装置的致动器为动力源的马达。
67.制动控制装置具有对设置于车辆1的制动系统进行控制的致动器,通过致动器来控制车辆1的制动力。
68.驻车支援装置100为使车辆1自动向驻车区域q行驶以支援车辆1的驻车的装置。
69.驻车支援装置100包括cpu(central processing unit:中央处理器单元)、mpu
(microprocessor unit:微处理器单元)等未图示的处理器(与本发明的计算机相当)、hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)等存储装置(与图1中的存储部120相当)、用于连接传感器类、外部设备等的接口电路、经由车载网络5与其他车载装置通信的车载网络通信回路。驻车支援装置100通过由处理器执行存储部120中存储的控制程序121来实现图1中示出的各种功能性结构。
70.即,驻车支援装置100作为功能性结构包括位置检测部110、周边识别部111、驻车区域检测部113、驻车框设定部114、驻车路径计算部115、驻车路径选择部116、自动行驶控制部117及存储部120。
71.位置检测部110基于车辆传感器部20的检测结果(输出)使用公知或周知的航位推测方法来检测车辆1的当前位置(自身位置)。
72.周边识别部111包括周边信息获取部111a、障碍物检测部111b及地图生成部111c。周边信息获取部111a基于周边检测传感器部10的检测结果获取车辆1周边的检测对象物的信息。例如,通过对摄像头10b的图像进行图像识别来检测划分车辆1的驻车区域的分界线等,并检测以车辆1为基准的分界线等的位置。障碍物检测部111b基于周边检测传感器部10的检测结果检测车辆1周边的障碍物。例如基于声纳10a的检测结果来检测周边的障碍物,并检测以车辆1为基准的障碍物的位置。
73.地图生成部111c基于周边信息获取部111a和障碍物检测部111b的检测结果来生成地图数据。地图数据为在以适当定时的车辆1的当前位置为原点的局部空间坐标系中记录有障碍物等的位置的数据。周边识别部111能够利用周边信息获取部111a、障碍物检测部111b及地图生成部111c并基于周边检测传感器部10的检测结果(输出)来识别与车辆1的行驶(包含驻车)相关的周边信息。需要说明的是,识别与车辆1的行驶相关的周边信息的技术能够广泛应用公知的技术。
74.驻车区域检测部113基于通过周边识别部111识别的周边信息来检测使车辆1驻车的驻车区域q。在此,图2中例示将他车2、3间的驻车框识别为驻车区域q的情况。基于周边信息的驻车区域q的检测方法能够使用公知或周知的技术。例如,驻车区域检测部113基于由地图数据表示的障碍物的分布来识别车辆1能够驻车大小的矩形区域,并将该区域检测作为驻车区域q。另外,例如,驻车区域检测部113通过利用针对摄像头10b的拍摄图像的图像识别来识别驻车区域的分界线,从而检测驻车区域q。
75.在检测到驻车区域q的情况下,驻车区域检测部113通过从拍摄图像的2维坐标系向地图数据的局部空间坐标系的投影转换而将拍摄图像中的驻车区域q的位置转换为地图数据的局部空间坐标系的位置。该投影转换能够使用公知或周知的适当技术来进行。通过向局部坐标系的投影转换,从而确定驻车区域q的位置。
76.驻车框设定部114基于由驻车区域检测部113检测到的驻车区域q,将规定驻车时容纳车辆1的范围的矩形状的驻车框设定在驻车区域q中。需要说明的是,在驻车区域q为由分界线划分的驻车区域的情况下,驻车框设定部114将该分界线设定为驻车框。
77.驻车路径计算部115为实现基于车辆1的当前位置计算到达驻车区域q的驻车路径的驻车路径计算功能的部分。本实施方式的驻车路径计算部115基于地图数据计算车辆1从当前位置向后而向驻车区域q驻车的驻车路径。在计算该驻车路径时,驻车路径计算部115能够通过使驻车路径中包含的圆弧的曲率半径(也可以称为回转半径)r不同来计算多种模
式的驻车路径。换言之,驻车路径计算部115具有计算包含所指定的曲率半径r的圆弧的驻车路径的驻车路径计算功能。
78.需要说明的是,根据曲率半径r的值,存在在例如一次前进后退切换次数时无法计算包含相应曲率半径r的圆弧的驻车路径的可能性。因此,驻车路径计算部115构成为,能够通过适当变更前进后退切换次数来尽可能计算包含所指定的曲率半径r的圆弧的驻车路径。
79.像这样,驻车路径计算部115能够计算驻车路径中的圆弧的曲率半径r不同且驻车路径中的前进后退切换次数适当不同的多种模式的驻车路径。
80.需要说明的是,前进后退切换是指为了变更车辆1向驻车区域q的进入角度而车辆1从前进变为后退或从后退变为前进地改变行进方向的驾驶操作,也称为折返路径。
81.驻车路径选择部116提取通过驻车路径计算部115计算的驻车路径中的前进后退切换的次数最少的驻车路径,并从所提取的驻车路径中选择驻车路径中的圆弧的曲率半径r最大的驻车路径。通过选择前进后退切换的次数最少且曲率半径r最大的驻车路径,从而能够选择驻车时抑制产生使乘员前后或左右摇晃的外力的路径、或选择抑制该外力的程度本身的路径,有利于改善乘员的乘坐感受、舒适性。
82.自动行驶控制部117生成通过自动行驶使车辆1前进的控制信息,并将该控制信息向车辆控制装置30输出。自动行驶控制部117关于驻车路径计算部115所计算的驻车路径生成相应的控制信息。
83.存储部120存储控制程序121及包含与搭载有该驻车支援装置100的车辆1的最小旋转半径相关的信息的车辆信息122等。最小旋转半径为能够确定车辆1的转小弯性的信息,也可以在车辆信息122中存储最小旋转半径的值本身,或能够计算最小旋转半径的信息(车辆1的轴距、左右操舵轮的距离、最大操舵时的外侧操舵轮与内侧操舵轮的舵角等)。
84.接下来说明本实施方式的动作。
85.在乘员在驻车场内驾驶车辆1移动期间,在驻车支援装置100中,周边识别部111基于周边信息持续识别周边的障碍物(例如图2中示出的他车2、3),并将所识别的障碍物的位置逐次记录在地图数据中。另外,驻车区域检测部113基于由该地图数据表示的障碍物的分布或拍摄图像的图像识别结果,还需检测在车辆1的侧方存在的驻车区域q。
86.如图2所示,在乘员在车辆1的前方发现驻车区域q时,乘员通过使车辆1驻车并操作未图示的hmi(human machine interface:人机接口),从而向驻车支援装置100指示自动驻车。
87.驻车支援装置100在被输入自动驻车的指示时,开始用于通过自动行驶使车辆1入库到驻车区域q的驻车支援处理。
88.图3是驻车支援处理的流程图。
89.首先,驻车支援装置100利用驻车区域检测部113检测驻车区域q(步骤s1:驻车区域检测步骤)。接下来,驻车支援装置100通过利用驻车路径计算部115基于车辆信息122确定车辆1的最小旋转半径,基于最小旋转半径设定驻车路径中的圆弧的曲率半径r的上限值ra和下限值rb(步骤s2:范围设定步骤)。
90.在本实施方式中,作为曲率半径r的上限值ra,设定最小旋转半径乘以预先设定的系数k的值。上述系数k采用包含适合于改善乘员的乘坐感受、舒适性的范围而不包含过大
曲率半径的值,例如,采用值5、或以值5为基准的前后的值。该系数k能够由驻车支援装置100或车辆1的制造商或车辆1的用户等设定适当的值。由此,能够对应于车辆1的转小弯性设定驻车路径中的圆弧的曲率半径r的上限值ra。
91.需要说明的是,也可以将上限值ra设定为车辆1的最大操舵量(也称为最大转舵量)的50%。在该情况下,若最小旋转半径为5m,则将两倍的10m设定为上限值ra即可。上限值ra能够在能够设定与车辆1的转小弯性对应的上限值ra的范围内采用适当的值。
92.另外,在本实施方式中,作为驻车路径中的圆弧的曲率半径r的下限值rb,设定车辆1的最小旋转半径。由此,能够避免在车辆1的最小旋转半径时计算无法完全转圈的驻车路径的状况,能够设定与车辆1匹配的曲率半径r的下限值rb。需要说明的是,也可以将下限值rb设定为大于车辆1的最小旋转半径的值。下限值rb的计算也可以采用在能够设定与车辆1的转小弯性对应的下限值rb的范围内至少以最小旋转半径为要素的其他算式。
93.接下来,驻车支援装置100通过利用驻车路径计算部115将驻车路径中的圆弧的曲率半径r设定为上限值ra(步骤s3),以满足该其曲率半径r的方式,计算使车辆1从当前位置向驻车区域q移动的驻车路径(步骤s4)。该驻车路径的计算处理能够适当应用公知的计算处理。
94.接下来,驻车路径计算部115判定所设定的曲率半径r是否满足下限值rb(步骤s5),在不低于下限值rb的情况下(步骤s5;否),将曲率半径r变更为从当前的曲率半径r减去规定值n得到的值(步骤s6),并转入步骤s4的处理。规定的值n设定为例如10cm。需要说明的是,值n能够变更为多种值。
95.由此,如图4所例示,计算曲率半径r不同的多种模式的驻车路径。需要说明的是,在图4中,附图标记d1示出从当前位置到切换车辆1的前进及后退的位置(在图4中,与以虚线示出的“前进后退切换位置”相当)的驻车路径,附图标记d2示出从前进后退切换位置到驻车区域q的驻车路径。并且,各驻车路径d1、d2中包含的圆弧的曲率半径r被设定为所设定的曲率半径。
96.另外,附图标记c1示出沿着驻车路径d1中的圆弧的圆,附图标记p1示出圆c1的中心。另外,附图标记c2示出沿着驻车路径d2中的圆弧的圆,附图标记p2示出圆c2的中心。
97.图4简单地示出通过一次前进后退切换从当前位置向驻车区域q驻车的情况的驻车路径。如上所述,在无法计算包含所设定的曲率半径r的圆弧的驻车路径的情况下,变更前进后退切换次数,并计算包含所设定的曲率半径r的圆弧的驻车路径,因此,还能够适当计算前进后退切换次数为两次以上的驻车路径。
98.需要说明的是,前进后退切换次数过多的驻车路径不优选,因此,设定前进后退切换次数的上限值,并在各驻车路径的计算处理中,在前进后退切换次数为上限值以下的范围无法计算驻车路径的情况下,也可以跳过该计算处理。
99.计算使上述曲率半径r不同的多种模式的驻车路径的步骤(s3
→
s4
→
s5
→
s6
→
s4
……
)与本发明的驻车路径计算步骤相当。在本实施方式中,计算驻车路径直到所设定的曲率半径r小于车辆1的最小旋转半径,因此,也计算包含与车辆1的最小旋转半径一致的曲率半径r的圆弧的驻车路径。
100.若计算驻车路径直到曲率半径r低于下限值rb(步骤s5;是),也就是说,在计算出曲率半径r从上限值ra(车辆1的最小旋转半径的值k倍)到下限值rb(车辆1的最小旋转半
径)的范围的驻车路径时,驻车支援装置100转入步骤s7的处理。
101.在步骤s7的处理中,驻车支援装置100通过驻车路径选择部116从所计算的多种模式的驻车路径中的、前进后退切换的次数最少的驻车路径中选择圆弧的曲率半径r最大的驻车路径。
102.并且,驻车支援装置100通过自动行驶控制部117基于所选择的驻车路径来生成控制信息,并将该控制信息向车辆控制装置30输出(步骤s8)。由此,通过该车辆控制装置30的控制,从而车辆1从当前位置开始自动行驶并向驻车区域q入库。上述步骤s7与本发明的驻车路径选择步骤相当,步骤s8与本发明的自动行驶步骤相当。
103.接下来,说明比较例和本发明的实施例。
104.如图5所示,比较例采用下述方法:通过将作为到达驻车区域q的驻车路径的基准的基本路径相似放大,从而生成将当前位置与驻车区域q相连的驻车路径。
105.基本路径为使用在预先设定的条件(例如,规定的车速及舵角)下计算出的最短回旋曲线或圆弧生成的路径。图5中示出由规定的曲线dc和在曲线dc的前后附加的回旋曲线cl1、cl2生成的情况。
106.比较例的驻车路径通过将基本路径的各部分dc、cl1及cl2在图5中的x方向及y方向上独立地放大(与相似放大相当)而生成。在此,曲线dca为将曲线dc相似放大的部分,回旋曲线cl1a、cl2a为将回旋曲线cl1、cl2相似放大的部分。由于进行相似放大,因此,比较例的驻车路径的各部分的曲率半径依赖于基本路径的各部分的曲率半径及相似放大率,另外,存在整体上驻车路径容易延长的倾向。
107.图6中示意性地示出本发明实施例的驻车路径。
108.在该图6中,示出由圆弧dcb和在圆弧dcb的前后附加的回旋曲线cl1b、cl2b生成实施例的驻车路径的情况。另外,图6中还同时示出比较例的驻车路径的曲线dca。
109.在本发明的实施例中,从曲率半径r不同的多种模式的驻车路径中,将驻车路径中的圆弧dcb设为曲率半径r最大的圆弧。由此,如图6所示,能够获得曲率半径大于比较例的路径。因此,与比较例相比,容易获得更加有利于改进乘员的乘坐感受、舒适性且有利于缩短驻车时间的驻车路径。
110.另外,对于在圆弧dcb的前后附加的回旋曲线cl1b、cl2b,也能够采用与基本路径的回旋曲线cl1、cl2大致相同的短距离的曲线,由此也能够获得有利于缩短驻车时间的驻车路径。
111.根据本实施方式,具有以下效果。
112.本实施方式的驻车支援装置100使用基于车辆信息122确定的车辆1的最小旋转半径和周边识别部111的识别结果,通过驻车路径计算部115,作为使车辆1停在驻车区域q的驻车路径,计算使其驻车路径中包含的圆弧的曲率半径r不同的多种模式的驻车路径。接下来,驻车支援装置100通过驻车路径选择部116从多种模式的驻车路径中的、前进后退切换的次数最少的驻车路径中选择曲率半径r最大的驻车路径。
113.由此,选择多种模式的驻车路径中的前进后退切换(也即车辆1的从前进到后退、或从后退到前进的改变行进方向的驾驶操作)的次数最少且圆弧的曲率半径最大的驻车路径,容易确定有利于改进乘员的乘坐感受、舒适性且有利于缩短驻车时间的驻车路径。
114.需要说明的是,对车辆信息122中的使用车辆1的最小旋转半径的情况进行了说
明,但不限定于此,也可以使用与车辆1的驻车路径相关的其他信息。例如,作为车辆信息122,也可以使用能够以一定程度推定车辆1的转小弯性的轴距的信息、车种信息、或预先设定的转小弯性的评价值等。
115.另外,驻车支援装置100利用驻车路径计算部115基于车辆1的最小旋转半径来限定多种模式的驻车路径中包含的圆弧的曲率半径r的范围。
116.由此,能够在减少驻车路径的计算所需的运算量、运算时间的同时,计算包含考虑了最小旋转半径的适当圆弧的驻车路径,。
117.而且,驻车支援装置100利用驻车路径计算部115,作为多种模式的驻车路径,计算使驻车路径中包含的圆弧的曲率半径r在基于车辆1的最小旋转半径设定的上限值ra与下限值rb之间不同的驻车路径。
118.由此,容易避免基于车辆1的最小旋转半径设定曲率半径r过大的驻车路径的状况,或容易避免设定具有车辆1无法行驶的急转弯的驻车路径的状况。需要说明的是,对于基于车辆1的最小旋转半径设定上限值ra和下限值rb双方的情况进行了说明,但也可以仅设定其中一个值的阈值,另一个值设为预先设定的固定值。
119.在此,图7示出变形例的驻车支援处理的流程图。需要说明的是,对于与图3中示出的步骤相同的处理标注相同的编号并省略重复说明。
120.驻车支援装置100在通过驻车区域检测部113检测到驻车区域q后(步骤s1),利用驻车路径计算部115基于车辆信息122确定车辆1的最小旋转半径,并将所确定的最小旋转半径设定为下限值rb(步骤s2a:范围设定步骤)。
121.接下来,驻车支援装置100利用驻车路径计算部115将驻车路径中的圆弧的曲率半径r设定为下限值rb(步骤s3a),计算使车辆1从当前位置移动到驻车区域q以满足其曲率半径r的驻车路径(步骤s4)。
122.接下来,驻车支援装置100判定由驻车路径计算部115计算的驻车路径中的前进后退切换次数是否比前次计算的驻车路径多(步骤s5a)。在此,在未计算前次驻车路径的情况下,步骤s5a的判定为否定结果,将曲率半径r变更为当前的曲率半径r与规定的值n相加的值(步骤s6a),并转入步骤s4的处理。
123.由此,重复执行由上述步骤s4
→
s5a
→
s6a
→
s4组成的处理,计算曲率半径r从下限值rb每次增加值n的多种模式的驻车路径。
124.在所计算的驻车路径中的前进后退切换次数与前次计算的驻车路径相比增加(步骤s5a;是)时,驻车支援装置100转入步骤s7的处理。
125.在步骤s7的处理中,驻车支援装置100利用驻车路径选择部116,从所计算的多种模式的驻车路径中的、前进后退切换的次数最少的驻车路径中选择圆弧的曲率半径r最大的驻车路径。并且,驻车支援装置100利用自动行驶控制部117基于所选择的驻车路径生成控制信息,并将该控制信息向车辆控制装置30输出(步骤s8)。
126.在图7示出的流程图中,能够选择使驻车路径中包含的圆弧的曲率半径r从车辆1的最小旋转半径逐渐增大的驻车路径,且为在前进后退切换的次数与前次计算的驻车路径相比增加时使驻车路径的计算处理中止并从其中选择圆弧的曲率半径r最大的驻车路径。由此,能够进一步减少运算量及运算时间地确定前进后退切换的次数最少且圆弧的曲率半径r最大的驻车路径。
127.另外,若所计算的驻车路径中的前进后退切换次数与前次计算的驻车路径相比增加,则使步骤s4的驻车路径的计算处理中止,因此不需要设定曲率半径r的上限值ra的处理。
128.需要说明的是,在图7示出的流程图中,也可以与图3的流程图的情况同样地,基于最小旋转半径来设定曲率半径r的上限值ra,并在曲率半径r与上限值ra相比增加的情况下,使步骤s4的驻车路径的计算处理中止。
129.也就是说,在所计算的驻车路径中的前进后退切换次数与前次计算的驻车路径的前进后退切换次数或由上限值ra形成的规定次数相比增加时,也可以使步骤s4的驻车路径的计算处理中止。规定次数也可以适当设定。
130.需要说明的是,上述实施方式只不过是本发明一方案的例示,能够在不脱离本发明主旨的范围内任意变形及应用。
131.例如,在上述实施方式中,说明了将本发明应用于图1中示出的驻车支援装置100及其控制方法的情况,但不限定于此。为了便于理解本技术发明,图1中示出的功能模块为将车辆1、驻车支援装置100的构成要素对应于主要处理内容分类示出的概略图,这些构成要素也可以对应于处理内容分类为更多的构成要素。另外,1个构成要素也可以以执行更多的处理的方式分类。
132.另外,驻车支援装置100的各构成要素的处理可以由1个硬件执行,也可以使用多个硬件执行。另外,各构成要素的处理可以由1个程序实现,也可以由多个程序实现。
133.另外,图3及图7中示出的流程图的处理单位为将驻车支援装置100进行的处理对应于主要处理内容分割的部分。实施方式不受各流程图的处理单位的分割方法、名称的限制。另外,上述流程图的处理顺序也不限于图示的例子。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。