1.本发明涉及康复机器人技术领域,尤其是涉及上肢等速训练康复机器人系统及机器人控制方法。
背景技术:
2.脑卒中俗称中风,是由于脑血管堵塞或破裂而造成的急性脑血管循环障碍疾病,具有高发病率、高死亡率、高致残率和高复发率等特点。目前,中风已成为我国的第一死亡原因,在中风患者中只有少数轻微患者可以自然恢复,大部分中风患者都会遗留下残疾问题,如肌肉功能下降等,通常表现为肌张力异常和肌肉废用性萎缩,严重影响了患者的运动功能,因此,加强患侧肌肉力量对于患者恢复日常活动能力具有重要意义。
3.现有的肌力训练包括等长收缩训练和等张收缩训练;其中,等长收缩训练就是在关节活动的某一点(一般为初始点)进行肌肉的静态收缩,这种训练方式虽然安全性高,但只能训练关节活动范围内某一角度的肌力,效率较低;等张收缩训练则是在关节全范围内进行动态抗阻运动,但只能训练最弱一点的肌力,若选取负荷过大,则容易引起肌肉疲劳和损伤。因此,现有的肌力训练虽然可以实现患者的肌肉训练,但是存在训练效率低且效果不佳的问题,降低了患者在康复训练过程中的体验度。
技术实现要素:
4.有鉴于此,本发明的目的在于提供上肢等速训练康复机器人系统及机器人控制方法,以缓解上述问题,通过对待训练手臂进行等速训练,提高了训练效率和训练效果,具有较好的实用价值。
5.第一方面,本发明实施例提供了一种上肢等速训练康复机器人系统,该系统包括:依次通信连接的虚拟现实场景生成模块、等速运动规划模块、等速训练控制模块和等速训练执行模块;其中,等速训练执行模块还与虚拟现实场景生成模块通信连接;虚拟现实场景生成模块,用于建立虚拟现实场景,并将虚拟现实场景发送至等速运动规划模块;其中,虚拟现实场景携带有训练提示和康复训练参数;康复训练参数包括待训练手臂中待训练关节数量、每个待训练关节的目标关节角速度、阻抗控制刚度系数和阻抗控制阻尼系数;训练提示包括训练任务,以及训练任务对应的起始位置和结束位置;等速运动规划模块,用于根据训练任务对应的起始位置和结束位置对待训练关节进行路径规划,得到每个待训练关节按照目标关节角速度完成训练任务对应的目标运动路径,并将目标运动路径发送至等速训练控制模块;等速训练控制模块,用于接收目标运动路径,并控制等速训练执行模块运动,以带动待训练手臂中各个待训练关节按照对应的目标运动路径进行等速康复训练运动。
6.进一步,本发明实施例提供了第一方面的第一种可能的实施方式,其中,上述等速训练执行模块采取外骨骼的形式,包括多个关节执行单元;上述等速训练控制模块还用于根据待训练关节的目标关节角速度,计算得到待训练关节对应的关节电流指令,并将关节电流指令发送至等速训练执行模块运动;等速训练执行模块运动,还用于根据待训练关节
的关节电流指令,对待训练关节对应的关节执行单元施加阻力矩,以使待训练关节按照目标关节角速度进行康复训练运动。
7.进一步,本发明实施例提供了第一方面的第二种可能的实施方式,其中,上述等速训练控制模块包括反馈单元和前馈单元;上述等速训练控制模块还用于根据待训练关节的第一力矩和第二力矩计算得到待训练关节对应的关节电流指令;其中,第一力矩为反馈单元根据待训练关节的目标关节角速度、阻抗控制刚度系数和阻抗控制阻尼系数计算得到;第二力矩为所述前馈单元根据待训练关节的重力补偿力矩和摩擦力补偿力矩计算得到。
8.进一步,本发明实施例提供了第一方面的第三种可能的实施方式,其中,上述虚拟现实场景还包括虚拟手臂;上述虚拟现实场景生成模块,还用于获取等速训练执行模块中每个关节执行单元的当前角度,并根据等速训练执行模块中每个关节执行单元的当前角度更新虚拟现实场景中虚拟手臂的位置。
9.进一步,本发明实施例提供了第一方面的第四种可能的实施方式,其中,该系统还包括:虚拟现实场景显示模块;其中,虚拟现实场景显示模块与虚拟现实场景生成模块通信连接;虚拟现实场景显示模块,用于接收虚拟现实场景生成模块发送的虚拟现实场景,并显示虚拟现实场景和虚拟手臂。
10.进一步,本发明实施例提供了第一方面的第五种可能的实施方式,其中,上述虚拟现实场景显示模块,还用于按照预设形式显示所述训练提示;其中,预设形式包括以下至少之一:文字形式、图片形式和语音形式。
11.进一步,本发明实施例提供了第一方面的第六种可能的实施方式,其中,上述关节执行单元包括以下至少之一:肩关节外摆/内收执行单元、前屈/后伸执行单元,旋内/旋外执行单元,肘关节屈曲/伸展执行单元,前臂旋前/旋后执行单元和腕关节背屈/掌屈执行单元。
12.进一步,本发明实施例提供了第一方面的第七种可能的实施方式,其中,该系统还包括:等速训练评价模块;其中,等速训练评价模块与等速训练控制模块连接;等速训练控制模块还用于当监听到等速训练执行模块训练完成时,触发等速训练评价模块对已完成康复训练进行评价,并生成评价信息。
13.进一步,本发明实施例提供了第一方面的第八种可能的实施方式,其中,上述评价信息包括预设评价指标;上述等速训练评价模块还用于按照预设评价指标对已完成康复训练进行评价,并生成评价信息;其中,预设评价指标包括以下至少之一:峰力矩、峰力矩体重比、峰力矩角度、平均功率和总功。
14.第二方面,本发明实施例还提供一种机器人控制方法,应用于第一方面的上肢等速训练康复机器人系统,其中,上述上肢等速训练康复机器人系统包括:虚拟现实场景生成模块、等速运动规划模块、等速训练控制模块和等速训练执行模块;该机器人控制方法包括:虚拟现实场景生成模块建立虚拟现实场景,并将虚拟现实场景发送至等速运动规划模块;其中,虚拟现实场景携带有训练提示和康复训练参数;康复训练参数包括待训练手臂中待训练关节数量、每个待训练关节的目标关节角速度、阻抗控制刚度系数和阻抗控制阻尼系数;训练提示包括训练任务,以及训练任务对应的起始位置和结束位置;等速运动规划模块根据训练任务对应的起始位置和结束位置对待训练关节进行路径规划,得到每个待训练关节按照目标关节角速度完成训练任务对应的目标运动路径,并将目标运动路径发送至等
速训练控制模块;等速训练控制模块接收目标运动路径,并控制等速训练执行模块运动,以带动待训练手臂中各个待训练关节按照对应的目标运动路径进行等速康复训练运动。
15.本发明实施例带来了以下有益效果:
16.本发明实施例提供了上肢等速训练康复机器人系统及机器人控制方法,通过等速运动规划模块规划得到每个待训练关节按照目标关节角速度完成训练任务对应的目标运动路径,等速训练控制模块控制等速训练执行模块运动,以带动待训练手臂中各个待训练关节按照对应的目标运动路径进行等速康复训练运动,从而实现了待训练手臂的等速康复训练,提高了训练效率和训练效果;以及在训练过程中,结合虚拟现实场景,增强了康复训练的趣味性,提高了用户的训练体验度,具有较好的实用价值。
17.本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书以及附图中所特别指出的结构来实现和获得。
18.为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
19.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1为本发明实施例提供的一种上肢等速训练康复机器人系统的结构示意图;
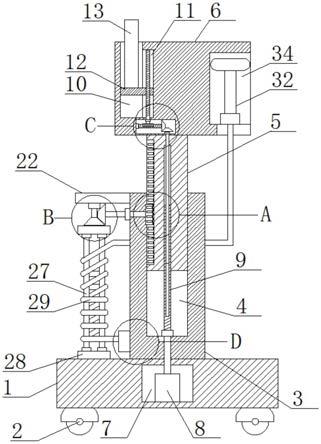
21.图2为本发明实施例提供的一种等速训练执行模块的结构示意图;
22.图3为本发明实施例提供的另一种上肢等速训练康复机器人系统的结构示意图;
23.图4为本发明实施例提供的一种上肢等速训练康复机器人系统的使用场景示意图;
24.图5为本发明实施例提供的一种虚拟现实场景的示意图;
25.图6为本发明实施例提供的一种等速训练控制模块的原理图;
26.图7为本发明实施例提供的一种机器人控制方法的流程图。
具体实施方式
27.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.针对现有的肌力训练存在训练效率低且效果不佳的问题,本发明实施例提供了上肢等速训练康复机器人系统及机器人控制方法,提高了训练效率和训练效果;以及在训练过程中,结合虚拟现实场景,增强了康复训练的趣味性,提高了用户的训练体验度,具有较好的实用价值。
29.为便于对本实施例进行理解,下面首先对本发明实施例提供的一种上肢等速训练
康复机器人系统进行详细介绍。
30.本发明实施例提供了一种上肢等速训练康复机器人系统,参见如图1所示的上肢等速训练康复机器人系统的结构示意图,该系统包括:虚拟现实场景生成模块10、等速运动规划模块20、等速训练控制模块30和等速训练执行模块40;虚拟现实场景生成模块10、等速运动规划模块20、等速训练控制模块30和等速训练执行模块40依次通信连接,并且,虚拟现实场景生成模块10还与等速训练执行模块40通信连接。
31.上述虚拟现实场景生成模块10用于建立虚拟现实场景,并将虚拟现实场景发送至等速运动规划模块20;具体地,在实际应用中,虚拟现实场景生成模块10中预先存储有多个康复训练场景,这里康复训练场景优选为日常生活场景对应的虚拟场景,如整理衣柜和搬运物品等,医生根据患者(或者称为用户)的康复程度选择当前康复训练对应的康复训练场景,如搬运物品,则虚拟现实场景生成模块10建立该搬运物品对应的虚拟现实场景。其中,虚拟现实场景携带有训练提示和康复训练参数;康复训练参数包括待训练手臂中待训练关节数量、每个待训练关节的目标关节角速度、阻抗控制刚度系数和阻抗控制阻尼系数;训练提示包括训练任务,以及训练任务对应的起始位置和结束位置;需要说明的是,训练提示中可能包括多个依次排列的训练任务,也可能是一个训练任务的多个步骤(即训练子任务),具体可以根据实际情况进行设置,本发明实施例对此不作限制说明。
32.上述等速运动规划模块20用于根据训练任务对应的起始位置和结束位置对待训练关节进行路径规划,得到每个待训练关节按照目标关节角速度完成训练任务对应的目标运动路径,并将目标运动路径发送至等速训练控制模块30;以及,等速训练控制模块30用于接收目标运动路径,并控制等速训练执行模块40运动,以带动待训练手臂中各个待训练关节按照对应的目标运动路径进行等速康复训练运动。
33.具体地,等速训练执行模块40包括多个固定环(未示出),通过将用户的待训练手臂分别穿过多个固定环,以将用户的待训练手臂固定在等速训练执行模块40上,从而在等速训练执行模块40输出的辅助力的带动下,待训练手臂中各个待训练关节按照对应的目标运动路径进行等速康复训练运动。因此,上述系统通过等速技术实现待训练手臂的康复训练,等速技术作为一种较为先进的康复技术,具有以下优势:(1)在有效性方面,等速训练中肌肉在整个关节活动范围的每个角度都能承受最大的负荷,产生最大力矩输出,从而提高了训练效率;(2)在安全性方面,等速训练中运动速度相对稳定,不会产生爆发式加速运动,可以避免肌肉关节损伤,提高了训练效果;同时,由于等速训练过程中速度恒定和顺应性阻力,等速训练不会加剧患者的肌肉痉挛,从而提高了训练效果,进而提高了患者在训练过程中的体验度。
34.本发明实施例提供的上肢等速训练康复机器人系统,通过等速运动规划模块规划得到每个待训练关节按照目标关节角速度完成训练任务对应的目标运动路径,等速训练控制模块控制等速训练执行模块运动,以带动待训练手臂中各个待训练关节按照对应的目标运动路径进行等速康复训练运动,从而实现了待训练手臂的等速康复训练,提高了训练效率和训练效果;以及在训练过程中,结合虚拟现实场景,增强了康复训练的趣味性,提高了用户的训练体验度,具有较好的实用价值。
35.在一种具体的实施方式中,上述等速训练执行模块40采取外骨骼的形式,包括多个关节执行单元;如图2所示,关节执行单元包括以下至少之一:肩关节外摆/内收执行单元
41、前屈/后伸执行单元42、旋内/旋外执行单元43、肘关节屈曲/伸展执行单/44、前臂旋前/旋后执行单元45和腕关节背屈/掌屈执行单元46。需要说明的是,对于上述6种自由度的关节执行单元,在训练过程中,可以每个自由度单独进行康复训练,也可以按照组合的形式进行康复训练,具体可以根据实际情况进行设置。
36.具体地,等速训练控制模块还用于根据待训练关节的目标关节角速度,计算得到待训练关节对应的关节电流指令,并将关节电流指令发送至等速训练执行模块运动;等速训练执行模块运动还用于根据待训练关节的关节电流指令,对待训练关节对应的关节执行单元施加阻力矩,以使待训练关节按照目标关节角速度进行康复训练运动,从而根据待训练关节的关节电流指令,调整待训练关节对应的关节执行单元施加阻力矩,以保证待训练关节按照等速进行康复训练运动。
37.可选的,上述等速训练控制模块包括反馈单元和前馈单元;等速训练控制模块还用于根据待训练关节的第一力矩和第二力矩计算得到待训练关节对应的关节电流指令;其中,第一力矩为反馈单元根据待训练关节的目标关节角速度、阻抗控制刚度系数和阻抗控制阻尼系数计算得到;第二力矩为前馈单元根据待训练关节的重力补偿力矩和摩擦力补偿力矩计算得到,从而通过调整第一力矩和第二力矩,确保得到的关节电流指令可以实现待训练关节的等速康复训练。
38.可选的,上述虚拟现实场景中还包括虚拟手臂;上述虚拟现实场景生成模块还用于获取等速训练执行模块中每个关节执行单元的当前角度,并根据等速训练执行模块中每个关节执行单元的当前角度更新虚拟现实场景中虚拟手臂的位置。具体地,虚拟手臂的运动轨迹与待训练手臂的运动轨迹应保持一致,即在训练过程中,待训练手臂完成训练提示中的训练任务,同时虚拟现实场景中虚拟手臂也完成该训练任务对应的虚拟训练任务,因此,虚拟现实场景生成模块还根据等速训练执行模块中各关节执行单元的实际角度,更新虚拟现实场景中虚拟手臂的位置。
39.进一步,如图3所示,该系统还包括:虚拟现实场景显示模块50;其中,虚拟现实场景显示模块50与虚拟现实场景生成模块10通信连接;具体地,虚拟现实场景显示模块50用于接收虚拟现实场景生成模块发送的虚拟现实场景,并显示虚拟现实场景和虚拟手臂。在实际应用中,上述虚拟现实场景显示模块50可以为带触摸功能的电子设备,也可以为配置有悬浮触控功能的电子设备,或者为同时配置触摸功能和悬浮触控功能的电子设备,以及仅配置有显示功能的电子设备,通过鼠标和键盘等进行操作控制的电子设备等,如显示器或者电视等,具体可以根据实际情况进行设置。
40.其中,虚拟现实场景显示模块50,还用于按照预设形式显示训练提示;其中,预设形式包括以下至少之一:文字形式、图片形式和语音形式;具体的形式可以根据实际情况进行设置。
41.以及,如图3所示,该系统还包括:等速训练评价模块60;其中,等速训练评价模块60与等速训练控制模块30通信连接;具体地,等速训练控制模块30还用于当监听到等速训练执行模块40训练完成时,触发等速训练评价模块60对已完成康复训练进行评价,并生成评价信息。需要说明的是,这里等速训练评价模块60可以对每次已完成康复训练进行评价,也可以按照预设间隔对已完成康复训练进行评价,如当患者完成预设次数如3次的康复训练运动时,等速训练控制模块30触发等速训练评价模块60进行评价。
42.其中,上述评价信息包括预设评价指标;等速训练评价模块60还用于按照预设评价指标对已完成康复训练进行评价,并生成评价信息;其中,该预设评价指标包括以下至少之一:(1)pt(peak torque,峰力矩),指肌肉在一次收缩过程中达到的最大力矩输出,反映患者的肌力情况;(2)pt/w(peak torque/weight,峰力矩体重比),指单位体重的峰力矩值,反映了肌肉的相对肌力,可用于不同体重人群之间的肌力对比;(3)pta(peak torque angle,峰力矩角度),指峰力矩出现时的关节角度,是关节的最佳用力角度;(4)平均功率,指肌肉单位时间内作的功;(5)tw(tota work,总功),指肌肉单次收缩所作的功,反映肌肉功能。具体地,在评级信息中可以包括各个评价指标对应的分值,也可以为各个评价指标设置权重,并根据每个评价指标的分值和对应的权重,计算得到一个总的评价分数;或者根据已完成康复训练运动的分值和预设范围,确定该分值对应的等级,并在评价信息中显示该等级等,以便医生根据评价信息调整患者的康复训练方案,从而更好的对患者进行康复训练,提高了训练效率和训练效果,具有较好的实用价值。
43.为了便于理解,这里举例说明。参见图4所示的一种上肢等速训练康复机器人系统的使用场景示意图,包括虚拟现实场景生成模块10、虚拟现实场景显示模块50、等速运动规划模块20、等速训练控制模块30、等速训练执行模块40和等速训练评价模块60;其中,虚拟现实场景生成模块10、等速运动规划模块20和等速训练评价模块60安装在同一个箱体中,箱体底部装有滚轮方便移动,在箱体上方放置虚拟现实场景显示模块50,该虚拟现实场景显示模块50为带触摸功能的显示器或电视;等速训练控制模块30安装在另一个箱体中,该箱体上方安装等速训练执行模块40,箱体底部同样装有滚轮方便移动。在使用过程中,患者坐在虚拟现实场景显示模块50后方中间位置,待训练手臂连接等速训练执行模块40进入康复训练。
44.对于上述上肢等速训练康复机器人系统,其工作流程如下:
45.(1)设备初始化,患者坐在虚拟现实场景显示模块50后方中间位置,待训练手臂连接等速训练执行模块40进入康复训练;
46.(2)医生根据患者的康复程度选择康复训练场景并确定康复训练参数;其中,康复训练参数包括:待训练手臂中待训练关节个数n,第i个待训练关节的目标关节角速度v
ri
,这里v
ri
为一个常数,且在训练过程中保持不变;第i个关节的阻抗控制刚度系数k
i
,第i个关节的阻抗控制阻尼系数b
i
,其中,i=1,
…
,n;
47.(3)虚拟现实场景生成模块10根据医生所选的康复训练场景生成具有训练提示的虚拟现实场景,并发送至虚拟现实场景显示模块50进行显示;以及,等速运动规划模块20根据训练提示生成每个待训练关节的目标运动路径q
ri
;其中,i=1,
…
,n;
48.其中,如图5所示的虚拟现实场景的示意图,包括:待训练手臂的当前位置51、待训练手臂的目标位置52和训练提示53;虚拟现实场景生成模块10实时读取等速训练执行模块40中各个关节执行单元的实际角度q
ai
,基于正向运动学计算并更新虚拟现实场景中待训练手臂的当前位置51。待训练手臂的目标位置52表示患者的待训练手臂下一步期望达到的位置,为了锻炼患者的认知能力,待训练手臂的目标位置52可以是随机生成的,例如从起点o移动至目标a或者b或者其他位置等。训练提示53用于指示患者当前训练任务,可以采用文字形式或者语音形式等,通常包括多个步骤(即多个训练子任务),并包含了每个训练子任务对应的起始位置和结束位置,从而便于等速运动规划模块20进行路径规划,得到待训练
关节完成每个待训练子任务的目标运动路径,以及完成一个训练子任务后随机进入下一个训练子任务,例如从a移动至目标b或者c或者其他位置;直至全部训练任务完成或者训练时间结束。由于训练子任务可以随机生成,因此,上述康复训练运动过程还需要患者大脑主动参与识别,从而可以同时对患者的手臂和大脑进行训练,提高了患者的认知能力和训练的趣味性。
49.此外,等速运动规划模块20根据训练提示生成每个待训练关节的目标运动路径q
ri
的过程如下:
50.(a1)对上肢外骨骼机器人建立dh坐标系,确定末端齐次变换矩阵t(q)∈se(3),线速度雅可比矩阵j
v
(q)∈r3×
n
,设置计算收敛阈值q
th
;
51.(a2)计算位置误差e
k
;其中,k=0时,e
k
=[x
e
‑
x
s
,y
e
‑
y
s
,z
e
‑
z
s
],q0=θ
s
;k>0时,δt=t(q
k
)
‑
t(q
k
‑1),e
k
=δt(1:3,4);其中,[x
s
,y
s
,z
s
]表示待训练手臂的当前位置的笛卡尔坐标,[x
e
,y
e
,z
e
]表示待训练手臂的目标位置的笛卡尔坐标,k表示当前规划时刻,k
‑
1表示上一个规划时刻,t(q
k
)表示当前时刻的末端齐次变换矩阵,t(q
k
‑1)表示上一时刻的末端齐次变换矩阵,θ
s
∈r
n
表示各个待训练关节的当前角度值,需要说明的是,这里上肢外骨骼即等速训练执行模块40;
[0052]
(a3)使用levenberg
‑
marquardt算法计算关节角度增量δq
k
=j
v
(q
k
)
t
(j
v
(q
k
)j
v
(q
k
)
t
λ2i)
‑1e
k
;其中,j
v
(q
k
)表示线速度雅可比矩阵,i表示单位矩阵,e
k
表示位置误差,λ表示阻尼系数,在实际应用中,levenberg
‑
marquardt算法是一种带阻尼的高斯
‑
牛顿算法,用于计算非线性函数的最小二乘拟合;
[0053]
(a4)迭代计算q
k 1
=q
k
δq
k
,直至||δq
k
||≤q
th
停止;此时q
k 1
为到达待训练手臂的目标位置时各个待训练关节的角度θ
e
;其中,θ
e
∈r
n
表示到达目标位置时各个待训练关节的角度;
[0054]
(a5)计算各个待训练关节的目标运动路径q
ri
=θ
s
(i) v
ri
·
t
i
,其中,v
ri
表示第i个待训练关节的目标关节角速度;θ
s
(i)表示θ
s
的第i项;θ
e
(i)表示θ
e
的第i项;t
i
表示第i个待训练上肢关节的运动时间,θ
e
∈r
n
表示到达目标位置时各个待训练关节的角度,θ
s
∈r
n
表示各个待训练关节的当前角度值。
[0055]
需要说明的是,为了保证目标运动路径q
ri
有解,本发明实施例只约束待训练手臂的目标位置的笛卡尔坐标,对到达目标位置的姿态则没有约束。而对于dh坐标系的建立末端齐次变换矩阵t(q)和线速度雅可比矩阵j
v
(q)的计算,具体可以参考现有技术,本发明实施例在此不再详细赘述。
[0056]
(4)患者在虚拟现实场景的引导下运动,等速训练控制模块30基于目标运动路径q
ri
计算各个待训练关节的关节电流指令i
i
,并发送至等速训练执行模块40;其中,i=1,
…
,n;
[0057]
具体地,如图6所示,等速训练控制模块30包括反馈单元31和前馈单元32,其中,反馈单元31使用阻抗控制率实现待训练手臂的等速运动,前馈环节32则用于对等速训练执行装置40的重力矩和摩擦力矩进行补偿,具体如下:
[0058]
根据反馈单元31的阻抗控制率计算待训练关节的第一力矩:τ
1i
=
‑
[k
i
*(q
ri
‑
q
ai
) b
i
*(v
ri
‑
v
ai
)];其中,τ
1i
表示第i个待训练关节的第一力矩,k
i
表示第i个待训练关节的阻抗
控制刚度系数,b
i
表示第i个待训练关节的阻抗控制阻尼系数,q
ri
表示第i个待训练关节的目标关节角度,q
ai
表示第i个待训练关节的实际角度,v
ri
表示第i个待训练关节的目标关节角速度,v
ai
表示第i个待训练关节的实际角速度,i=1,2,...,n,n为待训练关节的数量;待训练关节的实际角速度和实际角度可以通过传感器获取。需要说明的是,上述负号表示τ
1i
的方向与v
ri
的方向相反,是阻力矩。
[0059]
根据前馈单元32计算待训练关节的第二力矩:τ
2i
=g(q
ri
) f(v
ri
);其中,τ
2i
表示第i个待训练关节的第二力矩,g(q
ri
)表示第i个待训练关节的重力补偿力矩,f(v
ri
)表示第i个待训练关节的摩擦力补偿力矩。
[0060]
根据第一力矩和第二力矩可以得到待训练关节对应的关节电流指令:其中,i
i
表示第i个待训练关节的关节电流指令,即第i个待训练关节的关节执行单元的电机所需的电流信号,τ
1i
表示第i个待训练关节的第一力矩,τ
2i
表示第i个待训练关节的第二力矩,k
i
表示第i个待训练关节的关节执行单元的电机的力矩常数。
[0061]
因此,上述系统在等速训练过程中采用阻抗控制,其中,阻抗控制是一种力/位混合控制方式,将系统简化为一个阻尼
‑
弹簧
‑
质量系统,当机械臂(即等速训练执行模块40)和环境相接触时,用阻抗来描述机械臂的特征,通过调节阻抗控制器的三个参数(惯性系数、阻抗控制刚度系数和阻抗控制阻尼系数)来调节机械臂末端和环境之间接触力/位置的关系。需要说明的是,在实际应用中,上述惯性系数可以忽略不计,因此,本发明实施例通过调整待训练关节的阻抗控制刚度系数和阻抗控制阻尼系数,即可实现阻抗控制,从而实现等速康复训练运动。
[0062]
(5)等速训练执行模块40对患者的各个待训练关节对应的关节执行单元施加阻力矩,以使每个待训练关节按照目标关节角速度运动,直至训练完成;
[0063]
(6)训练完成后等速训练评价模块60自动对本次训练进行打分并生成评价报告。
[0064]
综上,本发明实施例提供的上肢等速训练康复机器人系统,具有以下优点:(1)采用阻抗控制的方式实现等速康复训练,与传统的速度控制方法相比,可以有效降低系统阻抗控制刚度系数,确保了训练过程中的患者的安全,提高了训练效率和训练效果;(2)结合虚拟现实技术,增强了康复训练的趣味性,在锻炼肌肉的同时提高了患者的感知分析能力,提高了用户的训练体验度;(3)每次训练完成后对已完成康复训练运动进行评价并生成评价信息,便于医生及时掌握患者的康复情况,进而优化患者的康复训练方案,提高了患者的康复效果,具有较好的实用价值。
[0065]
在上述系统实施例的基础上,本发明实施例还提供了一种机器人控制方法,应用于上述上肢等速训练康复机器人系统,其中,上述上肢等速训练康复机器人系统包括:虚拟现实场景生成模块、等速运动规划模块、等速训练控制模块和等速训练执行模块;如图7所示,该机器人控制方法包括以下步骤:
[0066]
步骤s702,虚拟现实场景生成模块建立虚拟现实场景,并将虚拟现实场景发送至等速运动规划模块;其中,虚拟现实场景携带有训练提示和康复训练参数;康复训练参数包括待训练手臂中待训练关节数量、每个待训练关节的目标关节角速度、阻抗控制刚度系数和阻抗控制阻尼系数;训练提示包括训练任务,以及训练任务对应的起始位置和结束位置;
[0067]
步骤s704,等速运动规划模块根据训练任务对应的起始位置和结束位置对待训练
关节进行路径规划,得到每个待训练关节按照目标关节角速度完成训练任务对应的目标运动路径,并将目标运动路径发送至等速训练控制模块;
[0068]
步骤s706,等速训练控制模块接收目标运动路径,并控制等速训练执行模块运动,以带动待训练手臂中各个待训练关节按照对应的目标运动路径进行等速康复训练运动。
[0069]
需要说明的是,上述步骤的具体过程可以参考前述实施例,本发明实施例在此不再详细赘述。
[0070]
本发明实施例提供的机器人控制方法,通过等速运动规划模块规划得到每个待训练关节按照目标关节角速度完成训练任务对应的目标运动路径,等速训练控制模块控制等速训练执行模块运动,以带动待训练手臂中各个待训练关节按照对应的目标运动路径进行等速康复训练运动,从而实现了待训练手臂的等速康复训练,提高了训练效率和训练效果;以及在训练过程中,结合虚拟现实场景,增强了康复训练的趣味性,提高了用户的训练体验度,具有较好的实用价值。
[0071]
本发明实施例提供的机器人控制方法,与上述实施例提供的上肢等速训练康复机器人系统具有相同的技术特征,所以也能解决相同的技术问题,达到相同的技术效果。
[0072]
本发明实施例还提供一种电子设备,包括处理器和存储器,存储器存储有能够被处理器执行的机器可执行指令,处理器执行机器可执行指令以实现上述机器人控制方法。
[0073]
本实施例还提供一种机器可读存储介质,机器可读存储介质存储有机器可执行指令,机器可执行指令在被处理器调用和执行时,机器可执行指令促使处理器实现上述机器人控制方法。
[0074]
本发明实施例所提供的上肢等速训练康复机器人系统及机器人控制方法的计算机程序产品,包括存储了程序代码的计算机可读存储介质,所述程序代码包括的指令可用于执行前面方法实施例中所述的方法,具体实现可参见方法实施例,在此不再赘述。
[0075]
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统和装置的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
[0076]
另外,在本发明实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0077]
所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个处理器可执行的非易失的计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read
‑
only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
[0078]
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了
便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0079]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。