1.本发明属于力学传感器领域,尤其涉及结构解耦六维力传感器。
背景技术:
2.六维力传感器一般由弹性敏感元件、应变计、惠斯顿电桥组成。它的基本原理是当构件受到外部载荷作用,被测量对象表面产生微小机械变形,变形与外力成正比关系。粘贴在表面的应变计随之发生相同的形变,使其电阻值有一个增量,通过惠斯顿电桥把电阻增量转化为电压增量,该电压增量与传感器所受外力也成正比。将电压信号通过数据采集与信号处理系统的处理,得到作用的外部载荷。目前,传统的六维力传感器很难完全实现结构解耦。
3.故,需要一种新的技术方案以解决上述技术问题。
技术实现要素:
4.本发明提供了一种结构解耦六维力传感器,目的是完全实现或者近似完全实现结构解耦。
5.为实现上述目的,本发明提供了如下方案:
6.一种结构解耦六维力传感器,包括固定框、位于固定框上方的浮动框;所述固定框与浮动框之间的空间中设置若干测力组件;所述浮动框具有水平面的对称中心;
7.所述若干测力组件包括设置在水平第一方向的四个x测力组件、设置在水平第二方向的四个z测力组件、设置在竖直方向的四个y测力组件;所述水平第一方向与水平第二方向在水平面内相互垂直,竖直方向同时与水平面内的水平第一方向、水平第二方向垂直;
8.四个x测力组件两两一组对称的设置于对称中心两侧,所述浮动框设有位于每一组的两个x测力组件两端的x上立柱;所述固定框设有位于每一组的两个x测力组件之间的x下立柱;每一组中的两个x测力组件同轴设置,且每个x测力组件的两端均连接在一个x上立柱与x下立柱之间;
9.四个z测力组件两两一组对称的设置于对称中心另外两侧,所述浮动框设有位于每一组的两个z测力组件两端的z上立柱;所述固定框设有位于每一组的两个z测力组件之间的z下立柱;每一组中的两个z测力组件同轴设置,且每个z测力组件的两端均连接在一个z上立柱与z下立柱之间;
10.四个y测力组件位于浮动框的四角位置,四个y测力组件中两两相对对称中心对称设置,每个y测力组件的上端连接浮动框而下端连接固定框。
11.进一步的,每个测力组件均为二力杆。
12.进一步的,每个测力组件的结构相同,包括测力元件、位于测力元件两端的拉杆、分别位于拉杆外端的柔性球铰,所述柔性球铰用于和固定框或浮动框连接。
13.进一步的,当在对称中心对浮动框施加力或者力矩时,12个测力组件同时施力于浮动框。
14.进一步的,所述浮动框包括浮动平台,所述x上立柱、z上立柱自浮动平台的底面向下延伸;且浮动平台为中心对称且大平面为正方形面的扁平方体;所述x上立柱、z上立柱与浮动平台共同形成的结构仍然是中心对称结构。
15.本发明技术方案的有益效果如下:
16.本发明能够实现力与力之间相互解耦;力与力矩之间相互解耦力矩与力矩之间相互解耦,具有结构解耦彻底、标定方便、精度高、结构简单、使用方便等优点。
附图说明
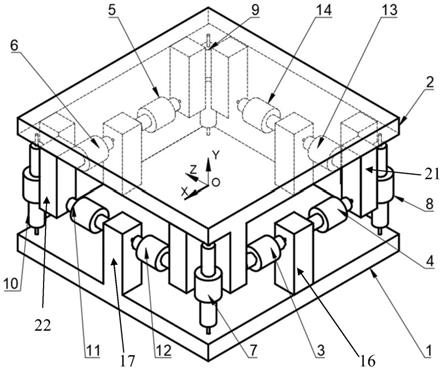
17.图1为本发明结构解耦六维力传感器的结构示意图;
18.图2为图1的主视图;
19.图3为图1的侧视图;
20.图4为固定框的结构示意图;
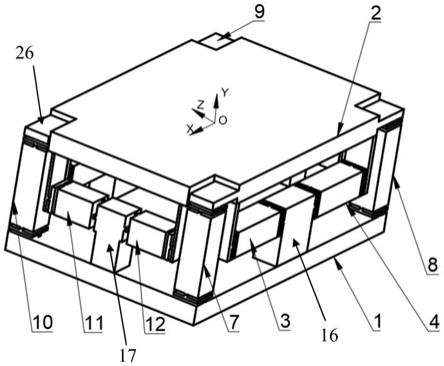
21.图5为浮动框的结构示意图;
22.图6为测力组件的结构示意图;
23.图7为测力组件的正视图。
具体实施方式
24.请参阅图1至图7所示,本发明公开以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
25.如图1至图7所示,本发明的结构解耦六维力传感器,包括固定框1,浮动框2,4个x测力组件3、4、5、6,4个y测力组件7、8、9、10,4个z测力组件11、12、13、14。其中,12个测力组件结构相同,均包括测力元件19、位于测力元件19两端的拉杆20、分别位于拉杆20外端的柔性球铰18,所述柔性球铰18用于和固定框1或浮动框2连接。拉杆20两端配有柔性球铰18,使测力组件均为二力杆。
26.固定框1包括固定平台15;浮动框2包括浮动平台17。浮动平台17为中心对称且大平面为正方形面的扁平方体。所述浮动框2通过12个测力组件与固定框1相连接。浮动框2具有水平面的对称中心。所述若干测力组件包括设置在水平第一方向的四个x测力组件3、4、5、6,及设置在水平第二方向的四个z测力组件11、12、13、14,以及设置在竖直方向的四个y测力组件7、8、9、10。所述水平第一方向与水平第二方向在水平面内相互垂直,竖直方向同时与水平面内的水平第一方向、水平第二方向垂直。在本实施方式中,为方便对浮动框2的对称中心、水平第一方向、水平第二方向、竖直方向的理解,可以参照图1至图3中所示,其中浮动框2的对称中心为o点,水平第一方向、水平第二方向、竖直方向可以理解为以o点为原点的三维直角坐标的三个方向,其中x方向为水平第一方向,z方向为水平第二方向,y方向为竖直方向。四个x测力组件3、4、5、6两两一组(x测力组件3、4一组;x测力组件5、6一组)对称的设置于对称中心o两侧。所述浮动框2设有位于每一组的两个x测力组件两端的x上立柱21。所述固定框1设有位于每一组的两个x测力组件之间的x下立柱16;每一组中的两个x测力组件同轴设置,且每个x测力组件的两端均连接在一个x上立柱与x下立柱16之间。四个z测力组件11、12、13、14两两一组对称的设置于对称中心o另外两侧。所述浮动框2设有位于每一组的两个z测力组件两端的z上立柱22;所述固定框设有位于每一组的两个z测力组件
之间的z下立柱17;每一组中的两个z测力组件同轴设置,且每个z测力组件的两端均连接在一个z上立柱22与z下立柱17之间。四个y测力组件7、8、9、10位于浮动框2的四角位置,四个y测力组件中两两相对对称中心对称o设置,每个y测力组件的上端连接浮动框2而下端连接固定框1。
27.在以xyz三维直角坐标系的基础上,其中4个x测力组件3、4、5、6的轴线垂直于纵向面yz,并且关于纵向面xy及yz两两对称布置;4个z测力组件11、12、13、14的轴线垂直于浮动框2所在平面和垂直于固定框1所在平面,并且关于纵向面xy及yz两两对称布置;4个y测力组件7、8、9、10的轴线垂直于纵向面xy,并且关于纵向面xy及yz两两对称布置。
28.本发明结构解耦六维力传感器的使用原理为:
29.当在点o施加x方向力时,不会产生力矩,但会导致12个测力组件同时施力于浮动框,此12个拉杆组件对浮动框2既有x方向的作用力,同时有y、z方向的作用力。由于4个x测力组件3、4、5、6,4个y测力组件7、8、9、10和4个z测力组件11、12、13、14分别关于纵向面xy及yz两两对称布置,各拉杆组件对浮动框2产生的z方向作用力相互抵消,4个y测力组件7、8、9、10对浮动框2产生的四个y方向作用力和4组x测力组件3、4、5、6与4组z测力组件11、12、13、14对浮动框2产生的八个y方向作用力大小相等方向相反,相互抵消。故当在点o施加x方向力时,对其它五个分量没有干扰。此时直接通过4个x测力组件3、4、5、6上的测力元件导出所测得的x方向力数据。
30.当在点o施加x方向力时,不会产生力矩,但会导致12个测力组件同时施力于浮动框,此12个拉杆组件对浮动框2既有x方向的作用力,同时有y、z方向的作用力。由于4个x测力组件3、4、5、6,4个y测力组件7、8、9、10和4个z测力组件11、12、13、14分别关于纵向面xy及yz两两对称布置,各拉杆组件对浮动框2产生的z方向作用力相互抵消,4个y测力组件7、8、9、10对浮动框2产生的四个y方向作用力和4组x测力组件3、4、5、6与4组z测力组件11、12、13、14对浮动框2产生的八个y方向作用力大小相等方向相反,相互抵消。故当在点o施加x方向力时,对其它五个分量没有干扰。此时直接通过4个y测力组件7、8、9、10上的测力元件导出所测得的y方向力数据。
31.当在点o施加z方向力时,与在点o施加x方向力时同理。
32.当在点o作用mx力矩时,12个测力组件同时施力于浮动框2,4个x测力组件3、4、5、6对浮动框2有x、y方向作用力,4个z测力组件11、12、13、14对浮动框2有z、y方向作用力,4个y测力组件7、8、9、10对浮动框2有z、y方向作用力。由于4个x测力组件3、4、5、6、4个y测力组件7、8、9、10和4个z测力组件11、12、13、14分别关于纵向面xy及yz两两对称布置,12个测力组件3~14对浮动框2的作用力在o点产生的my、mz力矩分别两两大小相等方向相反,相互抵消;12个测力组件3~14对浮动框2产生的x、y和z方向作用力分别两两大小相等方向相反,相互抵消。故当在点o作用mx力矩时,对其它五个分量没有干扰。此时直接通过4个x测力组件3、4、5、6上的测力元件导出所测得的mx力矩数据。
33.当在点o作用my力矩时,12个测力组件同时施力于浮动框2,并且分别有x、y和z方向作用力。由于4个x测力组件3、4、5、6、4个y测力组件7、8、9、10和4个z测力组件11、12、13、14分别关于纵向面xy及yz两两对称布置,12个测力组件3~14对浮动框2有y方向作用力,在o点产生的mx、mz力矩分别两两大小相等方向相反,相互抵消;12个测力组件3~14对浮动框2产生的x方向作用力和z方向作用力分别两两大小相等方向相反,相互抵消;4个y测力组件
7、8、9、10对浮动框2产生的四个y方向作用力和4组x测力组件3、4、5、6与4组z测力组件11、12、13、14对浮动框2产生的八个y方向作用力大小相等方向相反,相互抵消。故当在点o作用my力矩时,对其它五个分量没有干扰。此时直接通过4个y测力组件7、8、9、10上的测力元件导出所测得的my力矩数据。
34.当在点o作用mz力矩时,与在点o作用mx力矩时同理。
35.综上所述,本发明结构解耦六维力传感器在任意方向施加载荷时,对其它五个分量没有干扰,实现六维力传感器结构完全解耦。
36.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。