1.本发明涉及光轴调试技术领域,尤其涉及一种三轴稳定平台的光轴调试方法。
背景技术:
2.对于具有滚动环的三轴稳定平台或者是滚仰结构的两轴稳定平台进行光轴调试时,常规调试方法是将平行光管靶标十字丝设置在焦面位置,十字丝处于基本水平竖直即可满足无穷远模拟目标要求。
3.但对于具有滚动环的三轴稳定平台,或者滚仰式稳定平台,特别是对滚动光轴零位要求比较高的稳定平台,通常平行光管十字丝垂直度不能满足调试要求。并且,在进行光轴调试时,常规平行光管使用人眼进行对准,会存在对准误差,也会降低稳定平光轴调试精度,进而影响稳定平台工作时的跟踪精度。
技术实现要素:
4.为解决上述技术问题,本发明提出了一种具有滚动环的三轴稳定平台的光轴调试方法,用以解决现有技术中具有滚动环的三轴稳定平台的光轴调试由于常规平行光管十字丝目标和对准精度低的技术问题。
5.根据本发明的第一方面,提供一种具有滚动环的三轴稳定平台的光轴调试方法,所述光轴调试方法包括:
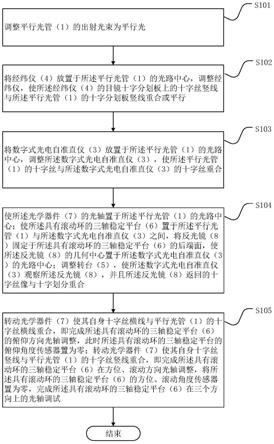
6.步骤s101:由五棱镜调整平行光管的出射光束为平行光;
7.步骤s102:将经纬仪放置于所述平行光管的光路中心,调整所述经纬仪使其水平置零,调整所述平行光管,使其十字分划与所述经纬仪的目镜的十字分划板十字重合或平行;
8.步骤s103:将数字式光电自准直仪放置于所述平行光管的光路中心,调整所述数字式光电自准直仪,使所述平行光管的十字丝与所述数字式光电自准直仪的十字丝重合;
9.步骤s104:将光学器件装配于具有滚动环的三轴稳定平台上,将所述具有滚动环的三轴稳定平台固定于转台上,所述光学器件面向所述平行光管,使所述光学器件的光轴置于所述平行光管的光路中心;使所述具有滚动环的三轴稳定平台置于所述平行光管与所述数字式光电自准直仪之间,将反光镜固定于所述具有滚动环的三轴稳定平台的后端面,使所述反光镜的几何中心置于所述数字式光电自准直仪的光路中心;调整转台,使所述数字式光电自准直仪观察所述反光镜,并且所述反光镜返回的十字丝像与所述数字式光电自准直仪的十字划分重合,所述返回的十字丝像为所述数字式光电自准直仪的十字分划通过所述反光镜所呈的像;
10.步骤s105:转动光学器件使其自身十字丝横线与平行光管的十字丝横线重合,即完成所述具有滚动环的三轴稳定平台的俯仰方向光轴调整,此时所述具有滚动环的三轴稳定平台的俯仰角度传感器置为零;转动光学器件使其自身十字丝竖线与平行光管的十字丝竖线重合,即完成所述具有滚动环的三轴稳定平台在方位、滚动方向光轴调整,将所述具有
滚动环的三轴稳定平台的方位、滚动角度传感器置为零,完成所述具有滚动环的三轴稳定平台在三个方向上的光轴调试。
11.根据本发明的上述方案,使用五棱镜和光电自准直仪对平行光管进行校准,选用数字式光电自准直仪,对准精度可达秒级,使用经纬仪对平行光管十字丝靶标进行校准,调试十字丝竖线相对大地完全垂直,平行光管完成调试。再次使用光电自准直仪,首先将其光轴与平行光管光轴调试平行,将稳定平台固定在转台上置于光电自准直仪和平行光管之间,且稳定平台光学器件面向平行光管一侧,稳定平台背侧固定一反光镜,调整转台使自准直仪观察反光镜返回十字丝与自准直仪十字丝重合。调整稳定平台框架使自身光学器件十字丝与平行光管十字丝重合,即完成了稳定平台光轴调试,此时稳定平台光轴与机械轴平行,此时的光轴即定为机械零位。本发明解决了由于常规平行光管十字丝目标和对准精度低的难题,提高了稳定平台光轴零位精度,保证了稳定平台工作时的跟踪精度。保证被测稳定平台使用的是平行光。稳定平台十字丝相对惯性空间水平竖直,提高了稳定平台工作时的跟踪等精度。
12.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
13.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明提供如下附图进行说明。在附图中:
14.图1为本发明一个实施方式的具有滚动环的三轴稳定平台的光轴调试方法流程示意图;
15.图2为本发明一个实施方式的平行光管调试示意图;
16.图3为本发明一个实施方式的平行光管十字丝调试示意图;
17.图4为本发明一个实施方式的具有滚动环的三轴稳定平台光轴调试示意图。
18.附图标记:1,平行光管;2,五棱镜;3,数字式光电自准直仪;4,经纬仪;5,转台;6,具有滚动环的三轴稳定平台;7,光学器件;8,反光镜。
具体实施方式
19.首先结合图1说明本发明一个实施方式的具有滚动环的三轴稳定平台的光轴调试方法。如图1、4所示,所述光轴调试方法,包括以下步骤:
20.步骤s101:由五棱镜调整平行光管1的出射光束为平行光;
21.步骤s102:将经纬仪4放置于所述平行光管1的光路中心,调整所述经纬仪4使其水平置零,调整所述平行光管1,使其十字分划与所述经纬仪4的目镜的十字分划板十字重合或平行;
22.步骤s103:将数字式光电自准直仪3放置于所述平行光管1的光路中心,调整所述数字式光电自准直仪3,使所述平行光管1的十字丝与所述数字式光电自准直仪3的十字丝重合;
23.步骤s104:将光学器件7装配于具有滚动环的三轴稳定平台6上,将所述具有滚动环的三轴稳定平台6固定于转台5上,所述光学器件7面向所述平行光管1,使所述光学器件7
的光轴置于所述平行光管1的光路中心;使所述具有滚动环的三轴稳定平台6置于所述平行光管1与所述数字式光电自准直仪3之间,将反光镜8固定于所述具有滚动环的三轴稳定平台6的后端面,使所述反光镜8的几何中心置于所述数字式光电自准直仪3的光路中心;调整转台5,使所述数字式光电自准直仪3观察所述反光镜8,并且所述反光镜8返回的十字丝像与所述数字式光电自准直仪3的十字划分重合,所述返回的十字丝像为所述数字式光电自准直仪3的十字分划通过所述反光镜8所呈的像;
24.步骤s105:转动光学器件7使其自身十字丝横线与平行光管1的十字丝横线重合,即完成所述具有滚动环的三轴稳定平台6的俯仰方向光轴调整,此时所述具有滚动环的三轴稳定平台的俯仰角度传感器置为零;转动光学器件7使其自身十字丝竖线与平行光管1的十字丝竖线重合,即完成所述具有滚动环的三轴稳定平台6在方位、滚动方向光轴调整,将所述具有滚动环的三轴稳定平台6的方位、滚动角度传感器置为零,完成所述具有滚动环的三轴稳定平台6在三个方向上的光轴调试。
25.如图2所示,所述步骤s101包括:将五棱镜2置于所述平行光管1与所述数字式光电自准直仪3之间,按照五棱镜法将平行光管1的出射光束调整为平行光。
26.如图3所示,所述步骤s102包括:将所述经纬仪4置于所述平行光管1的前方,放置于所述平行光管1的光路中心,调整所述经纬仪4使其水平置零,并调整所述经纬仪4使其目镜的十字分划板的十字丝与所述平行光管1的十字分划板图像基准对齐,转动所述经纬仪4,确定所述经纬仪4的目镜十字分划板上的十字丝竖线与所述平行光管1的十字分划板竖线是否重合或平行,若既不重合也不平行,调整所述平行光管1,直至所述经纬仪4,确定所述经纬仪4的目镜十字分划板上的十字丝竖线与所述平行光管1的十字分划板竖线重合或平行。
27.进一步地,以手动操作的方式转动所述经纬仪4。
28.所述步骤s103,包括:将数字式光电自准直仪3放置于所述平行光管1的光路中心,调整所述数字式光电自准直仪3的方位、俯仰旋钮,使所述平行光管1的十字丝像与所述数字式光电自准直仪3的十字丝重合。
29.本实施例中,所述数字式光电自准直仪3的对准精度可以小于1秒。
30.进一步地,所述步骤s104中,所述具有滚动环的三轴稳定平台6能够进行方位、俯仰、滚动三个方向的转动。
31.本实施例中,执行完步骤s104后,所述具有滚动环的三轴稳定平台6的机械轴与所述数字式光电自准直仪3的光轴重合;由于前期已经完成所述数字式光电自准直仪3的光轴与平行光管1的光轴的对准,因此所述具有滚动环的三轴稳定平台6的机械轴与平行光管1的光轴重合。
32.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
33.以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。