技术特征:
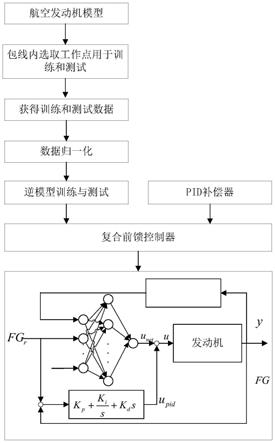
1.一种基于深度神经网络的航空发动机直接推力逆控制方法,其特征在于,包括以下步骤:步骤s1、根据涡扇发动机动力学特性确定神经网络的输入、输出以及拓扑形式,从而确定发动机推力逆模型的具体结构;步骤s2、根据涡扇发动机部件级模型在飞行包线内的工作数据,训练基于堆叠自编码器的发动机推力逆模型;步骤s3、设计pid补偿器,建立复合直接推力控制系统,由所述复合直接推力控制系统对涡扇发动机进行直接推力控制。2.根据权利要求1所述的一种基于深度神经网络的航空发动机直接推力逆控制方法,其特征在于,所述步骤s1中发动机推力逆模型建立如下:步骤s1.1、基于涡扇发动机工作条件及传感器的种类数目,确定观测参数组合,并基于所述观测参数组合确定发动机推力逆模型的输入如下:x=[h,ma,w
f
(k
‑
2),w
f
(k
‑
1),a8(k
‑
2),a8(k
‑
1),a8(k),n
l
(k
‑
1),n
h
(k
‑
1),p
22
(k
‑
1),t
22
(k
‑
1),p3(k
‑
1),t
43
(k
‑
1),p6(k
‑
1),t6(k
‑
1),fg(k
‑
1),n
l
(k),n
h
(k),p
22
(k),t
22
(k),p3(k),t
43
(k),p6(k),t6(k),fg
r
]其中,k为时刻标记,h为飞行高度,ma为飞行马赫数,w
f
为燃油流量,a8为可调喷管喉道面积,fg
r
为参考推力;所述观测参数组合如下:低压转速n
l
、高压转速n
h
、风扇出口压力p
22
、风扇出口温度t
22
、压气机出口压力p3、高压涡轮出口温度t
43
、低压涡轮出口温度p6、低压涡轮出口温度t6、推力fg;步骤s1.2、根据涡扇发动机控制量个数确定发动机推力逆模型的输出为w
f
(k);步骤s1.3、确定所述发动机推力逆模型的结构,首先依据发动机推力逆模型的输入和输出,确定自编码器的个数及每个自编码器可实现的降维数;然后在堆叠自编码器顶端增加逻辑回归层和输出层;最后设置各层神经网络的激活函数,其中自编码器的激活函数为logsig()函数,表达式如下:回归层的激活函数为tansig()函数,表达式如下:输出层的激活函数为线性激活函数。3.根据权利要求2所述的一种基于深度神经网络的航空发动机直接推力逆控制方法,其特征在于,所述步骤s2中训练发动机推力逆模型具体步骤包括:步骤s2.1、在飞行包线内选取工作点,在发动机飞行包线内,以预定高度h、马赫数ma为间隔,选取状态点;对所述状态点,分别以燃油流量w
f
的最大值和最小值[w
f,max
,w
f,min
]和可调喷管喉道面积a8的最大值和最小值[a
8,max
,a
8,min
]为限,按照预设间隔选取工作点;步骤s2.2、在每个工作点处,对燃油流量w
f
进行阶跃扰动,考虑到发动机加减速过程具有不同的动态特性,因此分别进行5%,10%,20%的正向和反向阶跃,记录步骤s1.1中所述观测参数组合与输出推力fg;步骤s2.3、对所述部件级模型施加步骤s2.2中所述阶跃扰动信号,获取仿真数据,将所
述仿真数据按照步骤s1.1中的观测参数组进行组合,将各组合随机打乱并归一化处理,从归一化处理后的组合中选取部分数据集作为训练集、剩余数据集作为测试集;步骤s2.3、基于训练数据集对发动机推力逆模型进行离线训练,直至训练误差达到给定精度要求。4.根据权利要求3所述的一种基于深度神经网络的航空发动机直接推力逆控制方法,其特征在于,所述步骤s2.3中的离线训练步骤如下:步骤s2.3.1、构造编码器与解码器的映射关系表达式如下:步骤s2.3.1、构造编码器与解码器的映射关系表达式如下:其中,是非线性激活函数,h为编码器输出,z为解码器输出,θ=[w,b,w
′
,b
′
]为待学习的模型参数,令w'=w
t
,使编码器与解码器捆绑权重;步骤s2.3.2、采用无监督方式对自编码器进行预训练;给定自编码器的学习目标为最小化z=f
θ
(x)与x间的重构误差,优化问题表达式如下:其中n为训练样本数;采用逐层贪婪训练方式求取θ;步骤s2.3.3、在堆叠自编码器网络顶层增加回归输出层,以含标签的原始数据为训练数据,设定(x
n
,y
n
)为第n个训练样本,由3个自编码器组成的堆叠自编码器的隐藏层输出依次为h
1,n
,h
2,n
,h
3,n
且且为网络预测输出,g(
·
)为堆叠自编码器到输出层的激活函数,w
s
,b
s
分别为该层的权值与偏置,构造网络的误差函数为:其中,θ为全部待调整网络参数;步骤s2.3.4、采用梯度下降算法对复合网络进行更新,表达式为:其中,α为微调过程中的参数学习速率。5.根据权利要求1所述的一种基于深度神经网络的航空发动机直接推力逆控制方法,其特征在于,所述步骤s3中复合直接推力系统建立如下:步骤s3.1、设计pid补偿器,建立复合直接推力器;将发动机推力逆模型作为主控制器,pid作为补偿;所述复合控制系统采用单变量控制方案,控制量为w
f
,被控量为fg,其反馈信号由机载自适应模型给出;步骤s3.2、基于所述复合直接推力系统对涡扇发动机进行直接推力控制;步骤s3.3、通过传感器采集观测参数测量值,使用涡扇发动机机载自适应模型作为推力估计器,根据观测参数测量值估计推力;步骤s3.4、所述复合直接推力系统依据观测参数测量值和估计推力计算控制量;步骤s3.5、涡扇发动机根据控制系统输入产生相应推力及传感器观测数据,记录输入
并进入下一个仿真循环。6.根据权利要求5所述的一种基于深度神经网络的航空发动机直接推力逆控制方法,其特征在于,所述步骤s3.2中复合直接推力系统计算控制量的具体步骤包括:步骤s3.2.1、离线训练好的发动机推力逆模型首先根据得到的参考推力fg
r
、发动机可测输出和其历史数据计算网络控制量u
net
,表达式为:u
net
=f
nn
(x)其中,f
nn
为所述发动机推力逆模型,x为所述网络输入;步骤s3.2.2、pid补偿器根据推力指令与实际输出的偏差计算补偿控制量u
pid
,表达式为:其中,e(k)=fg
r
‑
fg(k
‑
1);步骤s3.2.3、将u
net
和u
pid
进行线性叠加,作为复合直接推力系统的总输出。
技术总结
本发明公开了一种基于深度神经网络的航空发动机直接推力逆控制方法,首先根据涡扇发动机动力学特性确定神经网络逆模型输入、输出以及神经网络逆模型的具体结构,然后根据涡扇发动机部件级模型在飞行包线内的工作数据,训练基于堆叠自编码器的发动机推力逆模型;最后设计PID补偿器,建立复合直接推力系统,由所述复合直接推力系统对涡扇发动机进行直接推力控制;本发明提供的航空发动机直接推力逆控制方法解决了转速控制系统中发动机推力和转速之间关系不确定的缺陷以及传统的神经网络模型需要对包线进行区域划分的问题,能通过提取数据特征建立反映发动机动力学特性的逆模型,补偿建模误差带来的不确定性,实现涡扇发动机全包线内的直接推力控制。全包线内的直接推力控制。全包线内的直接推力控制。
技术研发人员:周鑫 黄金泉 鲁峰 陈前景 王成玖
受保护的技术使用者:南京航空航天大学
技术研发日:2021.08.17
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。