技术特征:
1.一种基于滑模观测器的风力机载荷预测控制方法,其特征在于,包括如下步骤:步骤s1、基于风切变效应、塔影效应和风湍流影响建立风速模型,同时建立风力机多变量独立变桨距系统模型;具体地,建立风速模型的具体步骤包括:步骤s1.1、采用指数模型计算风切变风速如下:其中,h0为已知风速点高度;h
w
为未知风速点高度;代表测量点高度为h0处的风速;代表测量点高度为h
w
处的风速;n为风切变指数;步骤s1.2、考虑塔影效应,对于上风向的风电机组,处于塔影坐标系内与叶轮平面垂直的某点风速为:的某点风速为:其中,v0为空间平均风速;a
t
为塔架半径;y为叶片微元到塔架轴线的y轴方向距离;x为叶片微元到塔架轴线的x轴方向距离;v
t
(y,x)为塔影效应对风速施加的扰动变化;v(y,x)为塔影坐标系内与叶轮平面垂直的某点风速;步骤s1.3、考虑风湍流影响,冯卡曼谱表达式如下:其中,f为频率;t
v
为湍流频带宽度;k
v
为湍流能量;φ(f)为谱的长度;其中建立风力机多变量独立变桨距系统模型具体步骤包括:步骤l1.1、对风力机运行工况和载荷模型进行线性简化处理;化简后的多变量独立变桨距系统状态方程和输出方程如下:y(t)=cx(t) du
cm
(t) d
d
d
cm
(t)其中,为状态变量;为状态变量的一阶导数;y=[m
tilt m
yaw
]
t
为输出变量;为控制输入变量;为扰动变量;a、b、b
d
、c、d、d
d
分别为系数矩阵,具体如下:分别为系数矩阵,具体如下:其中,h
fx
、h
mz
、k
mz
是经线性化处理后的系数;x
fa
是塔架俯仰位移;是塔架俯仰速度;h是塔架高度;m
tilt
是俯仰力矩;m
yaw
是偏航力矩;m
t
是塔架等效质量;b
t
是塔架等效阻尼;k
t
是
塔架等效弹性系数;是轮毂固定坐标系上的桨距角;是轮毂固定坐标系上的风速;r
b
是桨距角风轮半径。步骤s2、将指令跟踪误差与系统状态的变化量增广为状态向量,设计增广预测模型,消除稳态跟踪误差;步骤s3、利用自适应非奇异终端滑模观测器对系统状态进行估计,提升控制器的控制精度;步骤s4、采用基于改进的多目标变速灰狼优化算法对控制器参数进行寻优。2.根据权利要求1所述的基于滑模观测器的风力机载荷预测控制方法,其特征在于,步骤s2中增广预测模型设计包括以下步骤:步骤s2.1、基于步骤s1中建立的风力机多变量独立变桨距系统模型,为了获取增广预测模型,需要满足d=0和d
d
=0,则系统模型转化如下:y(t)=cx(t)步骤s2.2、对上述模型进行增广可得y(t)=cx(t)其中,b
c
=[b b
d
],u
c
(t)=[u
cm
(t) d
cm
(t)]
t
;步骤s2.3、将上述增广模型进行离散化可得:x(k 1)=a
d
x(k) b
cd
u
c
(k)y(k)=ck(k)其中,t
s
是系统采样时间;x(k)是当前时刻离散状态量;x(k 1)是下一时刻离散状态量;u
c
(k)是当前时刻离散控制输入变量;y(k)是当前时刻离散输出变量;步骤s2.4、对上述离散化模型取后向差分可得:x(k)=a
d
x(k
‑
1) b
cd
u
c
(k
‑
1)其中,x(k
‑
1)是上一时刻离散状态量;u
c
(k
‑
1)是上一时刻离散控制输入变量;将差分结果与离散化模型作差可得:δx(k 1)=a
d
δx(k) b
cd
δu
c
(k)其中,δx(k)是当前时刻离散状态变化量;δx(k 1)是下一时刻离散状态变化量;步骤s2.5、定义期望的输出为r(k),定义输出误差为:e(k)=y(k)
‑
r(k)其中,r(k)是当前时刻离散期望输出;e(k)是当前时刻离散输出误差;由上式可得:e(k 1)=e(k) ca
d
δx(k) cb
cd
δu
c
(k)
‑
δr(k 1)其中,e(k 1)是下一时刻离散输出误差;δu
c
(k)是当前时刻离散控制输入变化量;δr(k 1)是下一时刻离散期望输出变化量;步骤s2.6、将所述系统输出与期望输出之差e(k)增广为状态量,定义新的状态变量z(k)如下:
其中,z(k)是当前时刻增广状态量;根据步骤s2.4
‑
s2.6可得新的系统如下:其中,z(k 1)是下一时刻增广状态量;分别为系数矩阵,满足分别为系数矩阵,满足和对上述系统设计控制器,满足即可实现消除稳态误差的目标;步骤s2.7、基于上述系统,获得多步预测的向量形式如下:z=fz(k) gδu
c
(k) sδr(k)其中,z为状态变量的向量形式;δu
c
(k)为离散控制输入变化量的向量形式;δr(k)为离散期望输出变化量的向量形式;f、g、s为多步预测方程的系数矩阵,具体如下表示:离散期望输出变化量的向量形式;f、g、s为多步预测方程的系数矩阵,具体如下表示:离散期望输出变化量的向量形式;f、g、s为多步预测方程的系数矩阵,具体如下表示:基于步骤s2.2提供的输出方程进一步预测k 1到k p时刻的被控输出,系统未来p步预测的输出如下:y(k)=px(k) hu
c
(k) tδu
c
(k)其中,y为输出变量的向量形式;p、h、t为多步预测方程的系数矩阵,满足:
步骤s2.8、考虑存在风速扰动的情况下,寻找最优控制律序使目标函数满足:其中,q=diag{q1,q2,
…
,q
p
}、r=diag{r1,r2,
…
,r
m
},分别代表权重矩阵;对桨距角的大小和变化率施加约束,只考虑控制量约束和控制量增量约束,则变桨控制器时域约束条件为:3.根据权利要求2所述的基于滑模观测器的风力机载荷预测控制方法,其特征在于,所述步骤s3中自适应非奇异终端滑模观测器建立步骤如下:步骤s3.1、针对风力发电机模型进行自适应滑模观测器设计;当状态估计误差处于滑动模态时,通过高频滑模切换项进行故障重构;基于步骤s2.1所述的转化系统模型,设计滑模观测器如下:模观测器如下:其中,是滑模观测器的输出估计;是滑模观测器的状态估计;是滑模观测器状态估计的一阶导数;l是滑模观测器增益;v是滑模切换项;步骤s3.2、将上述滑模观测器与步骤s2.1所述转化系统模型作差,得到观测器状态估计误差如下:其中,是滑模观测器的状态估计误差;是滑模观测器状态估计误差的一阶导数;其中,λ、σ是正奇数且满足1<λ/σ<2;β、k是正常数;k(t)是自适应律;s是滑模观测器的非奇异终端滑模面;是系数矩阵b
d
的伪逆;sgn(
·
)是符号函数;代表滑模切换项的一阶导数;进一步地,
其中,是自适应律的一阶导数;a是自适应律增益系数;滑模观测器的非奇异终端滑模面s设计如下:自适应律增益系数a设计如下:4.根据权利要求1所述的基于滑模观测器的风力机载荷预测控制方法,其特征在于,所述步骤s4中基于改进的多目标变速灰狼优化算法对控制器参数进行寻优,具体步骤如下:步骤s4.1、基于降低桨距角变化和风力机载荷的目标,分别设计对应的目标函数如下:步骤s4.1、基于降低桨距角变化和风力机载荷的目标,分别设计对应的目标函数如下:其中,β2(t)、β3(t)是桨距角;是目标函数的系数;j1、j2依次是与降低桨距角变化和风力机载荷对应的目标函数;所述多目标变速灰狼优化算法如下:步骤s4.2、灰狼包围猎物,如下所示:其中,k是迭代次数;和是系数向量;是猎物所在的位置;是灰狼所在的位置;为灰狼与猎物之间的距离;和具体如下表示:其中,控制参数h在范围[0,2]内线性变化;和是随机向量,取值范围为[0,1];步骤s4.3、灰狼捕食猎物,如下所示:其中,分别为灰狼α
gwo
、β
gwo
、δ
gwo
当前所在位置;当前所在位置;为算法系数;分别为灰狼α
gwo
、β
gwo
、δ
gwo
与猎物之间的距离;所述代表遍历狼群中每只灰狼的位置;步骤s4.4、定义灰狼ω
gwo
相对于灰狼α
gwo
、β
gwo
、δ
gwo
的前进方向和步长如下:
其中,分别为灰狼ω
gwo
相对于灰狼α
gwo
、β
gwo
、δ
gwo
的前进向量;分别为算法系数;则灰狼ω
gwo
的最终位置如下:所述多目标灰狼优化算法使用外部种群archive存储当前非支配解,将网格机制引入到单目标灰狼优化算法中改善外部种群archive中的非支配解,并从外部种群archive中选择头狼α
gwo
、β
gwo
和δ
gwo
;所述头狼选择机制采用轮盘赌的形式,每一个个体被选择的概率与个体所在组的个体数成反比,具体如下所示:其中,c
a
是大于1的常数;n
j
是该个体所在组的个体总数;pr
j
是每一个个体被选择的概率;步骤s4.5、将多目标粒子群优化算法的速度和位置分量引入到多目标灰狼优化算法中,融合后的速度和位置分量更新公式如下:中,融合后的速度和位置分量更新公式如下:其中,是第i个灰狼的速度;是第i个灰狼的当前位置;c1、c2、c3是学习因子且满足c1,c2,c3∈[0,1];ζ是惯性因子。
技术总结
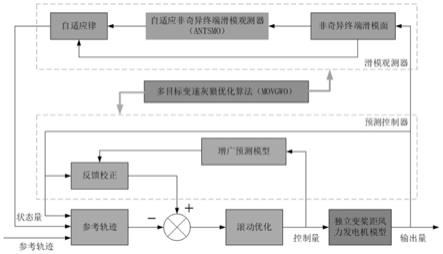
本发明公开了一种基于滑模观测器的风力机载荷预测控制方法;首先基于风切变效应、塔影效应和风湍流影响建立风速模型,同时建立风力机多变量独立变桨距系统模型;然后针对模型不匹配导致的模型预测控制性能下降的问题,将指令跟踪误差与系统状态的变化量增广为状态向量,设计增广预测模型,消除稳态跟踪误差;接着利用自适应非奇异终端滑模观测器对系统状态进行估计,提升控制器的控制精度及可靠性;最后采用基于改进的多目标变速灰狼优化算法对控制器参数进行寻优;通过仿真实验可以看出,本发明提供的风力机载荷预测控制方法可以有效消除稳态误差,缩短调节时间并提高控制性能。能。能。
技术研发人员:肖玲斐 马磊明 陈勇兴 黄欣浩
受保护的技术使用者:南京航空航天大学
技术研发日:2021.08.17
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。