1.本实用新型涉及粉矿自动装船装车技术领域,具体涉及粉矿装车溜筒自动对中和装货散装头自动下降控制系统。
背景技术:
2.在水泥厂、钢铁行业各种高炉水渣炼钢钢渣磨成粉末等企业,其成品即粉末矿粉绝大多数都是通过水泥罐车、粉灌船只来运输的,在粉末装车过程中,需要将溜筒散装头对中料口才能将粉末送入车中。
3.现有的装车电气控制系统,其xyz方向的电机绝大部分是绕线式电机 接触器(具有调速的)来控制或鼠笼异步电机 接触器(不调速)来控制,但是两者在xyz方向都没有位置编码器和plc等控制装置,只有几个简单的极限开关和按钮与操作手柄,这种溜筒对中料口完全靠人眼睛看和手快速操作,对中精度难度大,且在对中过程中启动设备频繁,对机电设备冲击大,不能很好的满足人们的使用需求。
4.因此,发明粉矿装车溜筒自动对中和装货散装头自动下降控制系统来解决上述问题很有必要。
技术实现要素:
5.本实用新型的目的是提供粉矿装车溜筒自动对中和装货散装头自动下降控制系统,以解决技术中现有的装车电气控制系统,其xyz方向的电机绝大部分是绕线式电机 接触器(具有调速的)来控制或鼠笼异步电机 接触器(不调速)来控制,但是两者在xyz方向都没有位置编码器和plc等控制装置,只有几个简单的极限开关和按钮与操作手柄,这种溜筒对中料口完全靠人眼睛看和手快速操作,对中精度难度大,且在对中过程中启动设备频繁,对机电设备冲击大,不能很好的满足人们的使用需求的问题。
6.为了实现上述目的,本实用新型提供如下技术方案:粉矿装车溜筒自动对中和装货散装头自动下降控制系统,包括大小车框架、升降机构、激光测距仪、相机、plc控制器、profinet交换机、激光打标机和摄像头,所述升降机构设置在大小车框架的正上方,所述升降机构包括有卷扬机,所述卷扬机上缠绕有钢丝绳,所述钢丝绳的末端连接有溜筒,所述plc控制器上设有rs485通讯模块和dio模块,所述rs485通讯模块与激光测距仪相连接,所述dio模块与激光打标机相连接,所述profinet交换机与plc控制器相连接,所述profinet交换机的连接端连接有相机控制伺服驱动器、相机控制器、x轴方向伺服驱动器、y轴方向伺服驱动器和z轴方向伺服驱动器,所述相机控制伺服驱动器与plc控制器相连接,所述相机控制器与相机相连接,所述x轴方向伺服驱动器用于驱动大车移动,所述y轴方向伺服驱动器用于驱动小车移动,所述z轴方向伺服驱动器用于驱动溜筒移动,所述摄像头设置在大小车框架的顶端,所述摄像头的连接端连接有硬盘录像机,所述硬盘录像机的连接端连接有显示屏。
7.优选的,所述x轴方向伺服驱动器、y轴方向伺服驱动器、z轴方向伺服驱动器和相
机控制伺服驱动器的连接端均连接有伺服电机,所述伺服电机上均设有编码器和抱闸。
8.优选的,所述相机的外部设有相机保护罩,所述相机控制器位于相机保护罩的内部。
9.优选的,所述相机保护罩的顶端设有连接板,所述连接板的顶端通过螺栓固定连接有电动缸,所述电动缸通过相机控制伺服驱动器连接的伺服电机驱动,所述电动缸上设有限位,所述限位与dio模块连接。
10.优选的,所述电动缸、激光测距仪和激光打标机的顶端均设有悬臂,所述悬臂安装在大小车框架的顶端下方。
11.优选的,所述x轴方向伺服驱动器、y轴方向伺服驱动器和z轴方向伺服驱动器上均设置有极限开关和坐标清零接近开关。
12.在上述技术方案中,本实用新型提供的技术效果和优点:
13.1、通过该系统可以自动控制装货车的料孔与溜筒的料孔进行对齐,然后自动控制溜筒下降来进行装车,从而实现了原来靠人工操作溜筒对中与自动放溜筒散装头的操作,节省了人工操作,减少设备冲击,延长了设备使用寿命;
14.2、通过设置的编码器可以实时获知x轴、y轴和z轴方向的行走距离,设置的抱闸防止伺服电机停止时由于外力作用而发生运动,通过设置的保护罩可以保护相机,通过设置的极限开关可以避免装置移动距离超出合适的范围,设置的坐标清零接近开关可以清除积累误差。
附图说明
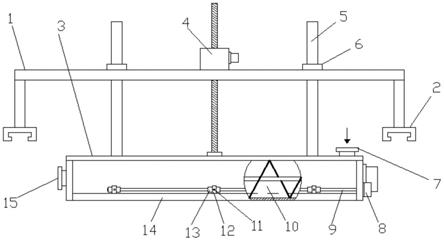
15.图1为本实用新型的整体结构示意图;
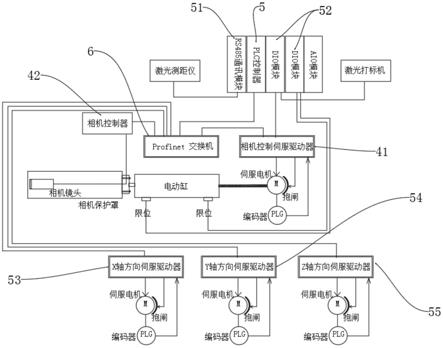
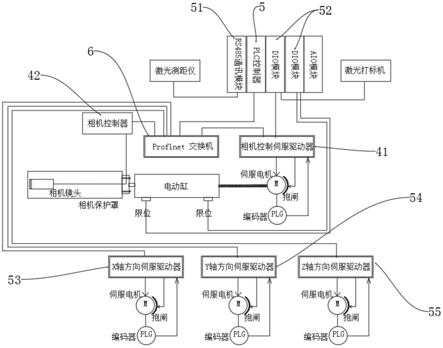
16.图2为本实用新型的工作原理示意图;
17.图3为本实用新型电动缸高度调节计算原理示意图。
18.附图标记说明:
19.1、大小车框架;2、升降机构;21、卷扬机;22、钢丝绳;23、溜筒;3、激光测距仪;4、相机;41、相机控制伺服驱动器;42、相机控制器;43、相机保护罩;44、连接板;45、电动缸;5、plc控制器;51、rs485通讯模块;52、dio模块;53、x轴方向伺服驱动器;54、y轴方向伺服驱动器;55、z轴方向伺服驱动器;6、profinet交换机;7、激光打标机;8、摄像头;81、硬盘录像机;82、显示屏。
具体实施方式
20.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
21.本实用新型提供了如图1
‑
3所示的粉矿装车溜筒自动对中和装货散装头自动下降控制系统,包括大小车框架1、升降机构2、激光测距仪3、相机4、plc控制器5、profinet交换机6、激光打标机7和摄像头8,所述升降机构2设置在大小车框架1的正上方,所述升降机构2包括有卷扬机21,所述卷扬机21上缠绕有钢丝绳22,所述钢丝绳22的末端连接有溜筒23,所述plc控制器5上设有rs485通讯模块51和dio模块52,所述rs485通讯模块51与激光测距仪3相连接,所述dio模块52与激光打标机7相连接,所述profinet交换机6与plc控制器5相连
接,所述profinet交换机6的连接端连接有相机控制伺服驱动器41、相机控制器42、x轴方向伺服驱动器53、y轴方向伺服驱动器54和z轴方向伺服驱动器55,所述相机控制伺服驱动器41与plc控制器5相连接,所述相机控制器42与相机4相连接,所述x轴方向伺服驱动器53用于驱动大车移动,所述y轴方向伺服驱动器54用于驱动小车移动,所述z轴方向伺服驱动器55用于驱动溜筒23移动,所述摄像头8设置在大小车框架1的顶端,所述摄像头8的连接端连接有硬盘录像机81,所述硬盘录像机81的连接端连接有显示屏82。
22.所述x轴方向伺服驱动器53、y轴方向伺服驱动器54、z轴方向伺服驱动器55和相机控制伺服驱动器41的连接端均连接有伺服电机,所述伺服电机上均设有编码器和抱闸,通过设置的编码器可以实时获知x轴、y轴和z轴方向的行走距离,设置的抱闸防止伺服电机停止时由于外力作用而发生运动。
23.所述相机4的外部设有相机保护罩43,所述相机控制器42位于相机保护罩43的内部,通过设置的保护罩43可以保护相机42。
24.所述相机保护罩43的顶端设有连接板44,所述连接板44的顶端通过螺栓固定连接有电动缸45,所述电动缸45通过相机控制伺服驱动器41连接的伺服电机驱动,所述电动缸45上设有限位,所述限位与dio模块52连接。
25.所述电动缸45、激光测距仪3和激光打标机7的顶端均设有悬臂,所述悬臂安装在大小车框架1的顶端下方。
26.所述x轴方向伺服驱动器53、y轴方向伺服驱动器54和z轴方向伺服驱动器55上均设置有极限开关和坐标清零接近开关,通过设置的极限开关可以避免装置移动距离超出合适的范围,设置的坐标清零接近开关可以清除积累误差。
27.本实用工作原理:
28.参照说明书附图1
‑
3,在使用者需要使用时,通过激光测距仪5测得其激光面与地面的距离小于2.5米时,数值通过rs485通讯模块32传输给plc控制器3,该系统则获知已有车辆进入待装货区域,立即开启用于车辆粗定位的激光打标机7,并提醒驾驶员把需要装料的孔中心与激光打标机7中心尽可能重合,驾驶员可以通过显示屏82看到摄像机8拍摄的画面来进行对准,当车辆按要求停准后,驾驶员上车开盖,下车,发货操作人员点击司磅计量系统进行去皮,通过激光测距仪3测得其激光面与装车最高面的距离设为h,将激光测距仪3与电动缸45均上升到上升极限时相机4的镜头最下沿与激光测距仪3最下沿的距离设为h1,相机4的镜头最下沿与装车最高面的最佳距离设为h0,则可以得到相机4的调节高度为hx,即hx=h
‑
h0
‑
h1,然后plc控制器5根据hx的值输出给相机控制伺服驱动器41来驱动伺服电机连接的电动缸45带动相机4下降到某一个物距进行拍照,拍照识别后,把圆心坐标和半径发给plc控制器5,再由plc控制器5根据模型输出x和y值,发给x轴方向伺服驱动器53和y轴方向伺服驱动器54来驱动伺服电机控制大车和小车移动到合适的位置,移动到合适的位置后,溜筒23的中心将与装车的料孔基本重合,然后启动z轴方向伺服驱动器55驱动伺服电机控制溜筒23下降即可;
29.参照说明书附图1
‑
3,在使用本装置时,通过设置的编码器可以实时获知x轴、y轴和z轴方向的行走距离,设置的抱闸防止伺服电机停止时由于外力作用而发生运动,通过设置的保护罩43可以保护相机42,通过设置的极限开关可以避免装置移动距离超出合适的范围,设置的坐标清零接近开关可以清除积累误差。
30.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。