1.本实用新型涉及自动跟随机器人技术领域,具体为一种基于到达角度的控制装置。
背景技术:
2.目前在企业车间或仓库中物料转运要么大多数采用采用人力推车,部分企业采用agv等昂贵的自动搬运车和系统来实现特定作业环节的搬运。
3.随着人力成本越来越高,人力搬运的方式不仅让工作人员难以长期承受,经济效益上越来越低;而自动搬运设备不仅对现有作业流程和场地有改造要求,实施成本和周期也很长,中小企业难以承受,为此,我们提出一种基于到达角度的控制装置。
技术实现要素:
4.本实用新型的目的在于提供一种供高度集成、可灵活配置的跟随组件和装置,通过改装或集成到现有工厂搬运车上,以降低的成本解决传统企业车间或仓库中使用大量人力手动推车进行物料转运的问题的基于到达角度的控制系统和控制装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种基于到达角度的控制装置,包括:
6.底板,所述底板顶部一端安装有控制支架,所述底板底部中心处安装有运动控制模块;
7.双轮差速驱动组件,包括驱动轮和动力模块组成,对称安装在底板底部;
8.夹持机构,安装在底板两侧,用于对放置在底板上的物品进行夹持作用;
9.挡板,通过转轴安装在底板顶部远离控制支架的一侧。
10.优选的,所述夹持机构包括双向螺纹杆、安装架、传动带、收纳槽、连接板和夹板,所述底板内部对称开设有两个收纳槽,所述收纳槽内部设有双向螺纹杆,所述双向螺纹杆中部表面上转动套接有安装架,且安装架固定安装在收纳槽顶部内壁,所述双向螺纹杆位于安装架两侧固定套接有传动带,所述底板内部两个双向螺纹杆通过传动带传动连接,且传动带与运动控制模块电性连接,所述双向螺纹杆两侧均啮合套接有连接板,且连接板与移动槽为滑动连接,所述连接板穿出底板的一端固定有夹板。
11.优选的,所述挡板表面上等距转动安装有输送辊,所述输送辊由运动控制模块电性控制。
12.优选的,所述控制支架扶杆表面上安装有手控装置。
13.优选的,所述底板远离控制支架一侧的表面上安装有避障组件,所述底板表面上位于避障组件两侧安装有声光组件。
14.优选的,所述底板底部位于运动控制模块一侧安装有uwb基站组件。
15.优选的,所述底板底部位于运动控制模块一侧安装有电气组件。
16.该实用新型还包括一种基于到达角度的控制装置,包括:控制器,安装在控制支架顶部的手控装置内部;
17.电机驱动器,安装在底板底部表面上,用于与双轮差速驱动组件两个驱动轮的电机连接。
18.优选的,所述手控装置具有启动开关、标签配对、急停、功能切换等功能,且手控装置功能均由控制器电性控制。
19.优选的,所述避障组件内部安装有红外线组件和超声波组件,且红外线组件和超声波组件均由控制器电性控制。
20.与现有技术相比,本实用新型的有益效果是:
21.1、搬运车在跟随过程中面对着比较复杂的工作环境,需要跟随装置在动态和静态运动过程中,排除干扰实现对跟随目标的高精度识别,并且精准的对搬运车进行直行、转弯、加减速控制和制动等运动控制。
22.2、现有的室内控制系统,例如视觉和激光方式,需要跟随目标在其视场角内才能实现跟随,并且对光照条件、目标的不同姿态和目标的重新锁定的适应能力较差,在转弯和中间障碍遮挡时,容易丢失跟随目标,而装置中对问题提出一定的解决方式。
23.3、采用基于超宽带的阵列天线的到达角度的方式获取跟随目标的所在角度和距离,能有效的解决目标被遮挡或目标多姿态难以锁定等现有跟随技术问题。同时能够的集成到其他搬运车中,节省企业设备采购成。
24.4、在夹持机构的作用下,对放置在底板上的物品进行限位保护作用,放置在随着装置移动的过程中物品掉落。
25.5、在挡板作用下,方便物品输送进入到底板顶部。
附图说明
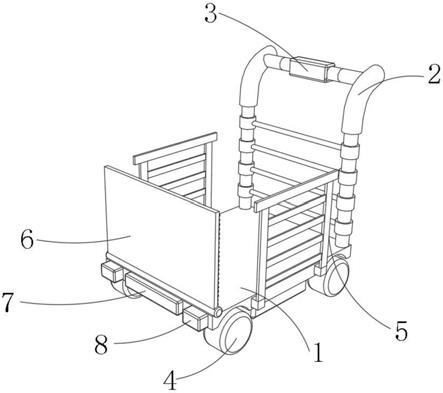
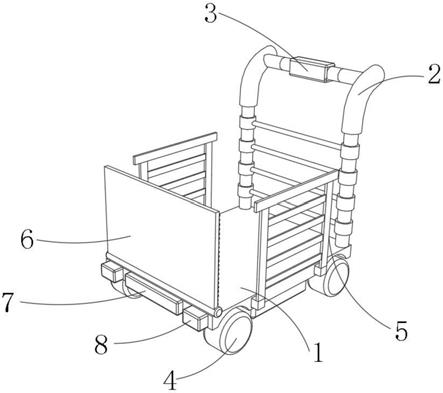
26.图1为本实用新型的整体结构示意图之一;
27.图2为本实用新型的整体结构示意图之二;
28.图3为本实用新型的夹持机构结构示意图;
29.图4为本实用新型的夹持机构部分结构示意图;
30.图5为本实用新型的挡板表面结构示意图;
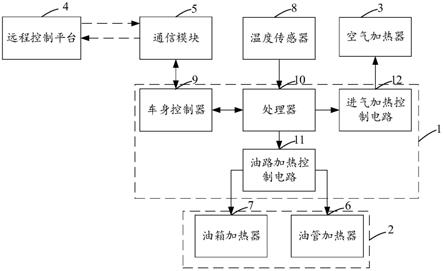
31.图6为本实用新型的装置控制系统示意图。
32.图中:1、底板;2、控制支架;3、手控装置;4、双轮差速驱动组件;5、夹持机构;51、双向螺纹杆;52、安装架;53、传动带;54、收纳槽;55、连接板;56、夹板;6、挡板;61、输送辊;7、避障组件;8、声光组件;9、运动控制模块;10、uwb基站组件;11、电气组件;12、控制器;13、电机驱动器。
具体实施方式
33.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.请参阅图1
‑
3,本实用新型提供一种技术方案:一种基于到达角度的控制装置,包括:
35.底板1,所述底板1顶部一端安装有控制支架2,通过控制支架2控制装置移动的方向;
36.双轮差速驱动组件4,包括驱动轮和动力模块组成,对称安装在底板1底部,动力模块和双轮差速驱动,通过控制左右两个电机的不同转速,实现左右旋转和前进;
37.夹持机构5,安装在底板1两侧,用于对放置在底板1上的物品进行夹持作用,在夹持机构5的作用下,对放置在底板1上的物品进行限位保护作用,放置在随着装置移动的过程中物品掉落;
38.挡板6,通过转轴安装在底板1顶部远离控制支架2的一侧,在挡板6作用下,方便物品输送进入到底板1顶部。
39.请参阅图2,所述底板1底部中心处安装有运动控制模块9,运动控制模块9根据收到的跟随数据结合前方人员行走习惯,采用算法处理,消除因标签在使用过程抖动产生的数据偏动,采用pid方式控制车体行走姿态和跟随转弯过程中的流畅和平稳,同时结合避障数据,及时减速制动保证行走过程的安全性。
40.请参阅图3和图4,所述夹持机构5包括双向螺纹杆51、安装架52、传动带53、收纳槽54、连接板55和夹板56,所述底板1内部对称开设有两个收纳槽54,所述收纳槽54内部设有双向螺纹杆51,所述双向螺纹杆51中部表面上转动套接有安装架52,且安装架52固定安装在收纳槽54顶部内壁,所述双向螺纹杆51位于安装架52两侧固定套接有传动带53,所述底板1内部两个双向螺纹杆51通过传动带53传动连接,且传动带53与运动控制模块 9电性连接,所述双向螺纹杆51两侧均啮合套接有连接板55,且连接板55 与移动槽为滑动连接,所述连接板55穿出底板1的一端固定有夹板56,通过运动控制模块9控制传动带53转动,使得两个双向伸缩杆同步转动,连接板 55沿着双向螺纹杆51转动的方向上啮合转动并沿着移动槽滑动,带动两个夹板56对底板1上的物品进行夹持限位作用。
41.请参阅图5,所述挡板6表面上等距转动安装有输送辊61,所述输送辊 61由运动控制模块9电性控制,通过运动控制模块9控制输送辊61的开启,使得物品通过多个输送辊61的作用输送进入到底板1顶部表面上。
42.请参阅图1,所述控制支架2扶杆表面上安装有手控装置3,通过手控装置3上功能按钮切换,用于在狭窄通道等场景,通过手动控制车体灵活运动。
43.请参阅图1,所述底板1远离控制支架2一侧的表面上安装有避障组件7,所述底板1表面上位于避障组件7两侧安装有声光组件8,避障组件7可选防撞条、红外和超声波传感器,根据车速和障碍物距离,来限制最大车速、最大转弯角度和紧急制动处理,车子在运行过程中,可以通过声光组件8,显示车体运行状态,方便操控和配置,并且还可提示周围人员车辆正在接近,注意避让。
44.请参阅图2,所述底板1底部位于运动控制模块9一侧安装有uwb基站组件10,uwb基站组件10采用阵列天线,在获取到标签信号与天线的距离的同时,还可以通过测量标签信号到达天线的相位差来计算标签到uwb基站组件 10平面的角度。通过卡尔曼滤波算法,将滤波后处理后的跟随角度和跟随距离数据发送给运动控制模块9。
45.请参阅图2,所述底板1底部位于运动控制模块9一侧安装有电气组件 11,电气组
件11包含稳压模块、安全继电器、断路器、急停、开关等安全电气设计,确保设备在充电、运行时的电气安全。
46.请参阅图6,一种基于到达角度的装置控制系统,
47.包括:控制器12,安装在控制支架2顶部的手控装置3内部控制器12还采用zigbee通讯用于快速调试和升级维护,支持手机或电脑通过蓝牙连接车体进行控制;
48.电机驱动器13,安装在底板1底部表面上,用于与双轮差速驱动组件4 两个驱动轮的电机连接,通过控制器12控制电机驱动器13的开启,并控制两个电机的转动,带动驱动轮的开启。
49.请参阅图6,所述手控装置3具有启动开关、标签配对、急停、功能切换等功能,且手控装置3功能均由控制器12电性控制,控制器12控制手控装置3上的按键功能,从而控制各个装置的开启和关闭。
50.请参阅图6,所述避障组件7内部安装有红外线组件和超声波组件,且红外线组件和超声波组件均由控制器12电性控制,通过避障组件7内部安装的红外线和超声波传感器,进行防撞和避让的功能,同时避障组件7主板受到控制器12的控制。
51.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
52.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。