1.本实用新型涉及力和力矩传感器技术领域,尤其涉及一种基于透镜的多轴力和力矩传感器。
背景技术:
2.多轴力和力矩传感器广泛应用于机器人操控、自动化产业及实验中,多轴力矩传感器是一种能够测量多个自由度上的线性力和力矩的器件,可观测6个自由度,但现有的多轴力矩传感器的结构普遍较为复杂,制造成本较高,且使用不便。
技术实现要素:
3.本实用新型的目的是提供一种基于透镜的多轴力和力矩传感器,该传感器设计合理、结构紧凑,可实现6个自由度的线性力和力矩的测量,测量方便,可根据不同透镜的光学特征,更换透镜以调节感光芯片上的光强与明暗图像信息,进而可在物理结构不改变的前提下,通过更换透镜与感光芯片以改变量程与测量对象,从而扩展传感器的应用,泛用性强,同时,由于透镜的存在,结构所产生的微小形变可被放大,因此降低了对光源与感光芯片的精度要求,实用性强。
4.为实现上述目的,采用以下技术方案:
5.一种基于透镜的多轴力和力矩传感器,包括安装壳、安装于安装壳内的传感器座,以及安装于安装壳内且位于传感器座下方的光源pcb板;所述传感器座的底部还安装有感光pcb板,且感光pcb板的表面还覆盖有透镜安装板;所述透镜安装板的底部周侧还设置有若干透镜阵列,且若干所述透镜阵列之间围成一个空白区域;所述光源pcb板的顶部与空白区域对应处还设有一光源芯片,感光pcb板的底部与空白区域及每一透镜阵列的对应处还均设有一感光芯片。
6.进一步地,所述安装壳包括底座,以及顶盖;所述底座顶部开设有第一容腔,传感器座、感光pcb板和光源pcb板均布置于第一容腔内;所述顶盖固定安装于传感器座的顶部,并将第一容腔密封。
7.进一步地,所述传感器座包括布置于第一容腔内的连接环体、位于连接环体内的中心盘,以及围绕中心盘布置并间隔连接于中心盘外壁与连接环体内壁之间的若干弹性连接梁;所述感光pcb板和透镜安装板均安装于中心盘的底部。
8.进一步地,每一弹性连接梁的两侧还均设有一凹型缺口。
9.进一步地,所述连接环体的周侧还倾斜设有若干弹性支撑梁。
10.进一步地,所述连接环体的下部周侧还间隔开设有若干限位缺口,第一容腔的内壁与若干限位缺口对应处还设有若干限位卡座。
11.采用上述方案,本实用新型的有益效果是:
12.设计合理、结构紧凑,可实现6个自由度的线性力和力矩的测量,测量方便,且可根据不同透镜的光学特征,更换透镜以调节感光芯片上的光强与明暗图像信息,进而可在物
理结构不改变的前提下,通过更换透镜与感光芯片以改变量程与测量对象,从而扩展传感器的应用,泛用性强,同时,由于透镜的存在,结构所产生的微小形变可被放大,因此降低了对光源与感光芯片的精度要求,使用方便。
附图说明
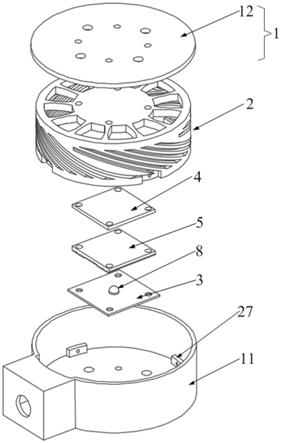
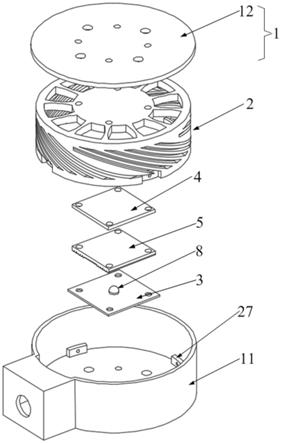
13.图1为本实用新型的爆炸图;
14.图2为图1另一视角的爆炸图;
15.图3为本实用新型的传感器座的立体图;
16.图4为本实用新型的光源pcb板、透镜安装板和感光pcb板的爆炸图;
17.图5为本实用新型的其中一实施例中,该传感器在未受任何力作用下的,各个感光芯片上的光线分布图;
18.图6为本实用新型的其中一实施例中,该传感器在受fx和fy力作用下的,各个感光芯片上的光线分布图;
19.图7为本实用新型的其中一实施例中,该传感器在受mx、my、mz和fz力作用下的,各个感光芯片上的光线分布图;
20.其中,附图标识说明:
21.1—安装壳;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2—传感器座;
22.3—光源pcb板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4—感光pcb板;
23.5—透镜安装板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6—透镜阵列;
24.7—空白区域;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8—光源芯片;
25.9—感光芯片;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11—底座;
26.12—顶盖;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21—连接环体;
27.22—中心盘;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23—弹性连接梁;
28.24—凹型缺口;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25—弹性支撑梁;
29.26—限位缺口;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
27—限位卡座。
具体实施方式
30.以下结合附图和具体实施例,对本实用新型进行详细说明。
31.参照图1至7所示,本实用新型提供一种基于透镜的多轴力和力矩传感器,包括安装壳1、安装于安装壳1内的传感器座2,以及安装于安装壳1内且位于传感器座2下方的光源pcb板3;所述传感器座2的底部还安装有感光pcb板4,且感光pcb板4的表面还覆盖有透镜安装板5;所述透镜安装板5的底部周侧还设置有若干透镜阵列6,且若干所述透镜阵列6之间围成一个空白区域7;所述光源pcb板3的顶部与空白区域7对应处还设有一光源芯片8,感光pcb板4的底部与空白区域7及每一透镜阵列6的对应处还均设有一感光芯片9。
32.其中,所述安装壳1包括底座11,以及顶盖12;所述底座11顶部开设有第一容腔,传感器座2、感光pcb板4和光源pcb板3均布置于第一容腔内;所述顶盖12固定安装于传感器座2的顶部,并将第一容腔密封;所述传感器座2包括布置于第一容腔内的连接环体21、位于连接环体21内的中心盘22,以及围绕中心盘22布置并间隔连接于中心盘22外壁与连接环体21内壁之间的若干弹性连接梁23;所述感光pcb板4和透镜安装板5均安装于中心盘22的底部;
每一弹性连接梁23的两侧还均设有一凹型缺口24;所述连接环体21的周侧还倾斜设有若干弹性支撑梁25;所述连接环体21的下部周侧还间隔开设有若干限位缺口26,第一容腔的内壁与若干限位缺口26对应处还设有若干限位卡座27。
33.本实用新型工作原理:
34.继续参照图1至7所示,本实施例中,安装座的顶盖12还预留有若干螺纹孔,用于与外部的不同执行器连接;连接环体21的下部周侧设有若干限位缺口26,组装时,可经限位卡座27、限位缺口26将连接环体21卡紧限位,简单方便;中心盘22位于连接环体21内的上部,并通过若干弹性连接梁23与连接环体21的内壁连接,且每一弹性连接梁23的两侧还均设有一凹型缺口24,这种设计方式可放大作用在中心盘22上的fx,fy与mz;弹性连接梁23围绕中心盘22的中心均匀散布,整体上成中心对称,并且沿x轴及y轴方向成轴对称,弹性连接梁23的数目与厚度影响着传感器的灵敏度与量程,其数目越多,传感器灵敏度越低,同时量程越大,其厚度越小,传感器灵敏度越高,同时量程越小;连接环体21的周侧还倾斜设有若干弹性支撑梁25,弹性支撑梁25的存在提供了传感器座2产生沿着x轴与y轴旋转的自由度,放大了作用在其整体上的mx,my,同时,该弹性支撑梁25的存在允许了z轴受力时的形变,放大了作用在其整体上的fz;该实施例中,若干弹性支撑梁25之间被设计为类平行的结构,当从x轴及y轴正方向或负方向观察时,弹性支撑梁25之间相互平行,这保证了传感器座2在受力时的各向同性;此外,弹性支撑梁25的长度、斜率、厚度与稀疏程度均可影响传感器的灵敏度与量程,该实施例中,其上沿不超过中心盘22的底面,下沿不超过连接环体21底部的上表面,厚度不超过传感器座2的侧面厚度,其余参数可根据需求对应。
35.透镜安装板5覆盖于感光pcb板4的表面,透镜安装板5的底部设有若干透镜阵列6,该实施例中,透镜安装板5的底部四侧各设置一组透镜阵列6,感光pcb板4的底部与每一透镜阵列6和空白区域7对应处均设有一个感光芯片9(该实施例中,感光芯片9的数量为5个),感光芯片9可为光电二极管阵列、ccd感光耦合芯片等,可以测量到照射到其表面区域内的光线分布信息与光强;通过上述这种设置方式,可使每个感光芯片9处于光强及明暗图案变化最强的区域,同时,也能放大结构中形变所造成的光强及明暗图形变化,进而降低对光源与感光芯片9的精度要求,其具体地原理性说明如下:
36.继续参照图5所示,其中一应用实施例中,感光pcb板4底部的5个感光芯片9分别记为oxp、oxn、oyp、oyn、oo,当传感器不受力且正常工作时,各感光芯片9上的光线分布如图5所示,其中黑色区域为光源发出的光线无法抵达的区域,如图6所示,图6中的(a)和(b)分别表示fx为负、正时,各个感光芯片9的光线分布图,图6中的(c)和(d)分别表示fy为负、正时,各个感光芯片9的光线分布图,当传感器只受fx时,中心盘22带动感光pcb板4与透镜阵列6沿x轴平移,感光芯片9的oxn与oxp上的有光区域与无光区域对应移动,oyn与oyp的光强不发生变化;反之,当传感器只受fy时,中心盘22带动感光pcb板4与透镜沿y轴平移,感光芯片9的oyn与oyp上的有光区域与无光区域对应移动,oxn与oxp的光强不发生变化,在此情况下,通过分析oxn,oxp,oyn,oyp四个感光芯片9各自的总光强,即可计算传感器受力。
37.如图7所示,图7中的(e)、(f)、(g)和(h)分别表示传感器受mx、my、mz和fz力时,各个感光芯片9的光线分布图,当传感器受到mx,my,mz或fz时,中心盘22带动感光pcb板4与透镜阵列6产生特定形式的移动,感光芯片9上的明暗区域发生改变,因此通过综合分析各感光芯片9上的总光强与各感光芯片9上明暗区域在芯片内部单元中的坐标,即可分析得到各
受力情况;在传感器受力时,可得到包含各芯片总光强值ioxn、ioxp、ioyn、ioyp、ioo和各芯片内部感光单元得到明暗边界的斜率值koxn、koyn、koxp、koyp、koo;fx、fy、fz、mx、my、mz与ioxn、ioxp、ioyn、ioyp、kxn、kyn、kxp、kyp之间的关系可描述为:
38.[f
x
f
y
f
z
m
x
m
y
m
z
]
t
=k
×
[io
xn
io
x
io
yn
io
yp
ko
xn
ko
yn
ko
xp
ko
yp
]
t
[0039]
为了计算校准矩阵k,不同的六轴力和力矩组合将会被施加于传感器,同时对应的角位移量需要被记录,被成对记录下的角位移值与所施加的力、力矩值可被代入上述公式,然后,利用优化算法(如lavenberg
‑
marquardt算法)即可找到最佳拟合的校准矩阵k。
[0040]
以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。