1.本实用新型涉及塔吊技术领域,具体涉及一种行走塔吊。
背景技术:
2.塔吊是建筑工地上最常用的一种起重设备,又名“塔式起重机”,以一节一节的接长(简称“标准节”),用来吊施工用的钢筋、木楞、混凝土、钢管等施工的原材料,塔吊是工地上一种必不可少的设备。
3.目前的塔吊在工地上的适用范围仅仅在其起重臂可以覆盖的范围内,在施工场地较大的情况下往往需要设置多个塔吊,耗费了更多的施工成本,通过也会减小其他设备的运行空间。
技术实现要素:
4.为解决以上技术问题,本实用新型提供了一种行走塔吊,通过行走单元的运动可以带着塔吊本体进行移动,增大塔吊本体的使用范围。
5.本实用新型采用以下技术方案:
6.一种行走塔吊,包括行走机构及位于行走机构上部的塔吊本体,所述行走机构包括底盘和与底盘转动连接的行走单元,所述行走单元包括与plc处理器电连接的回转系统和行走系统,所述行走系统安装于回转系统底部。
7.作为优选,行走机构包括两组底盘,任意一组底盘均设有行走单元,塔吊本体设置于两组底盘之上。
8.作为优选,所述回转系统包括设置于底盘内的转向电机和回转壳体,所述转向电机的输出端连接回转壳体,所述回转壳体下端连接行走系统。
9.作为优选,所述回转系统还包括回转变频器、回转制动器和回转编码器。
10.作为优选,所述回转系统对称设置于底盘左右两侧。
11.作为优选,所述行走系统包括行走电机和行走轮,所述行走电机的输出端连接行走轮。
12.作为优选,所述行走系统还包括行走变频器、行走制动器。
13.作为优选,所述行走系统对称设置于回转系统左右两侧。
14.作为优选,所述底盘上设有倾角传感器,所述倾角传感器与plc处理器电连接。
15.作为优选,还包括与plc处理器无线连接的遥控盒。
16.与现有技术相比,本实用新型具有以下优点:
17.1、本实用新型通过行走单元的运动可以带着塔吊本体进行移动,增大塔吊本体的使用范围。
18.2、回转系统可以对行走系统进行原地回转,以便移动时绕过一些障碍物和方便通过弯曲的道路。
19.3、塔吊本体固定于两组底盘之间,增大了塔吊本体的底面积,可以有效地防止塔
吊本体倾倒。
20.4、设置了回转变频器、回转制动器、行走变频器和行走制动器,可以更精确的运动到设定位置。
附图说明
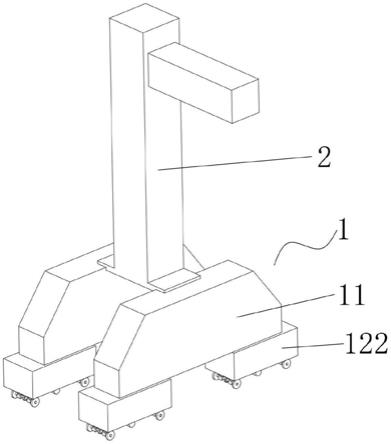
21.图1为本实用新型的结构示意图。
22.图2为本实用新型的另一侧结构示意图。
23.图3为图2的a部局部放大图。
24.图4为隐去塔吊本体的结构示意图。
25.图5为底盘的结构示意图。
26.图6为本实用新型的电路连接示意图。
27.图7为本实用新型的使用状态示意图。
28.图中,行走机构1、底盘11、安装腔111、电机安装部112、回转系统12、转向电机121、回转壳体122、回转变频器123、回转制动器124、回转编码器125、行走系统13、行走电机131、行走轮132、行走变频器133、行走制动器134、塔吊本体2、plc处理器3、倾角传感器4、遥控盒5
具体实施方式
29.为了便于理解本实用新型技术方案,以下结合附图与具体实施例进行详细说明。
30.实施例1
31.如图1
‑
7所示,一种行走塔吊,包括行走机构1及位于行走机构1上部的塔吊本体2,所述行走机构1包括底盘11和与底盘11转动连接的行走单元,所述行走单元包括与plc处理器3电连接的回转系统12和行走系统13,所述行走系统13安装于回转系统12底部。具体的,所述行走系统13可以承载着底盘11进行移动,通过塔吊本体2吊取货物,并运送到指定地点放下货物,回转系统12可以对行走系统13进行原地回转,以便移动时绕过一些障碍物和方便通过弯曲的道路。
32.行走机构1包括两组底盘11,任意一组底盘11均设有行走单元,塔吊本体2设置于两组底盘11之上,具体的,所述底盘11上设有塔吊本体2安装的安装腔111,两组底盘11之间存在一定距离,塔吊本体2一侧固定连接于一组底盘11的安装腔111上,另一侧固定连接于另一组底盘11的安装腔111上,相当于增大了塔吊本体2的底面积,可以有效地防止塔吊本体2倾倒。
33.所述回转系统12包括设置于底盘11内的转向电机121和回转壳体122,所述转向电机121的输出端连接回转壳体122,所述回转壳体122下端连接行走系统13。所述底盘11内设有电机安装部112,所述转向电机121设置于电机安装部112内,并与plc处理器3电连接。转向电机121通电开始工作时,可以带着回转壳体122进行转动,转动到需要的角度后,行走系统13可以带着塔吊本体2进行移动。
34.所述回转系统12还包括回转变频器123、回转制动器124和回转编码器125。所述回转变频器123用于转向电机121的变频,调节其功率。例如,需要将回转壳体122转动90度,那么以正常频率转动至85度之后,以较小功率缓缓转动至90度,可以提高转动的精度,防止惯
性和机械结构的精度影响最终转动角度。所述回转制动器124用于转向电机121的制动,当回转角度达到设定值之后,回转制动器124控制转向电机121制动,回转编码器125为回转角度传感器,用于获取当前回转角度并传递给plc处理器3。
35.所述回转系统12对称设置于底盘11左右两侧。具体的,所述每一组底盘11左右两侧各设有一个回转系统12,本实施例中,有两组底盘11,故设有四组回转系统12。
36.所述行走系统13包括行走电机131和行走轮132,所述行走电机131的输出端连接行走轮132。所述回转壳体122底部设有轮组,所述轮组包括四个行走轮132,通过转动轴连接同一侧两个行走轮132,两侧的行走轮132之间设有行走电机131,行走电机131通过皮带与转动轴上的皮带轮连接,通过皮带轮来驱动两侧的行走轮132运动。或者行走电机131通过链条与转动轴上的链轮连接,通过链轮来驱动两侧的行走轮132运动。
37.所述行走系统13还包括行走变频器133、行走制动器134。所述行走变频器133用于行走电机131的变频,调节其功率。例如,需要行走电机131控制行走轮132运动50米,那么以正常频率转动至49米之后,以较小功率缓缓转动至50米,可以提高移动的精度,防止惯性和机械结构的精度影响最终移动距离。所述行走制动器134用于行走电机131的制动,当移动距离达到设定值之后,行走制动器134控制行走电机131制动。
38.所述行走系统13对称设置于回转系统12左右两侧。本实施例中,回转系统12共有4组,所述行走系统13设有8组。
39.所述底盘11上设有倾角传感器4,所述倾角传感器4与plc处理器3电连接。所述倾角传感器4用于测量当前底盘11的倾角,可以有效的检测到运动过程中行走轮132是否压到障碍物。以防止在地面不平时工作所带来的安全隐患,提高了安全性
40.还包括与plc处理器3无线连接的遥控盒5,操作人员可以在地面上操作遥控盒5,以此来对plc处理器3下达命令,控制塔吊的行驶,能使操作人员更清晰观察四周的环境以达到安全高效的效果。
41.操作人员在地面上操作遥控盒5,遥控盒5的控制面板上的回转操作杆是将回转方向信号和模拟量开度信号传输给plc处理器3,plc处理器3将方向和开度信号发送给转向电机121进行工作,回转变频器123将方向信号转化成转向电机121旋转方向,将模拟量信号的大小转换成频率大小发送给转向电机121以实现控制回转方向和速度,遥控面板上按下回转制动按键将信号发送给plc,plc发送给变频器使回转电机制动,遥控面板上的前后操作杆是将前进后退方向信号和模拟量开度信号传输给plc处理器3,plc处理器3将方向和开度信号发送给行走电机131,行走变频器133将方向信号转化成行走电机131旋转方向,将模拟量信号的大小转换成频率大小发送给行走电机131以实现控制前进后退方向和速度,倾角传感器4连接plc处理器3将底盘11的倾斜度发送给plc处理器3并在遥控盒5上显示角度,若倾斜度大于5度时plc处理器3切断塔吊本体2的驱动电机电源使塔吊本体2不能进行吊装工作。
42.以上仅是本实用新型的优选实施方式,本实用新型的保护范围以权利要求所限定的范围为准,本领域技术人员在不脱离本实用新型的精神和范围内做出的若干改进和润饰,也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。