1.本实用新型涉及清洁机结构,特别涉及一种清洁机升降雷达结构及清洁机。
背景技术:
2.随着生活水平的不断提高,人们对生活的质量要求亦不断增加,机器人代替人工作成了必然的趋势,家庭清扫机器人随之进入越来越多的家庭。
3.清洁机作为常见的清洁机器人,其技术含量也是越来越高。一些清洁机的顶部设置有雷达组件。清洁机上装设雷达装置,以帮助建图、定位、避障,但雷达装置凸出于清洁机的上表面,其容易被沙发等家具底部卡住,由此也容易被损坏。
技术实现要素:
4.本实用新型的主要目的为提供一种清洁机升降雷达结构及清洁机,旨在解决雷达装置凸出于清洁机的上表面,容易被沙发等家具底部卡住或损坏的问题。
5.为了实现上述目的,本实用新型提供一种清洁机升降雷达结构,包括:
6.雷达组件,所述雷达组件可升降的设置于所述清洁机,其中,所述雷达组件上升到极限位置时,所述雷达组件露出于所述清洁机的盖板;
7.高度判断传感件,所述高度判断传感件设置于所述清洁机,用于判断所述清洁机所处工作空间的高度;
8.抬升机构,所述抬升机构设置于所述清洁机内,用于抬升所述雷达组件,所述抬升机构自初始状态将所述雷达组件抬升到所述极限位置后脱离于所述雷达组件并返回初始状态;
9.至少一个导向部,所述导向部与所述雷达组件配合,在所述雷达组件的升降过程中起导向作用;
10.至少一个锁止结构,所述锁止结构设置于所述清洁机内,所述雷达组件上升到所述极限位置时,所述锁止结构对所述雷达组件形成锁止状态或释放状态,其中,所述锁止结构处于锁止状态时,所述雷达组件被固定于所述极限位置,所述锁止结构处于释放状态时,所述雷达组件下降回落;
11.其中,所述抬升机构与所述锁止结构的状态根据所述高度判断传感件的信号调整。
12.进一步的,所述雷达组件包括承载盒、雷达罩和雷达;所述承载盒为所述雷达组件的底座,所述雷达罩可在竖直方向上翻转或浮动的固定于所述承载盒上,所述雷达设置于所述承载盒上,且位于所述雷达罩的下方;
13.所述高度判断传感件为压力感应功能件,所述压力感应功能件设置于所述雷达罩的下方用于感应所述雷达罩运动状态变化。
14.进一步的,所述雷达罩包括板体和设于所述板体上的罩体,所述罩体与所述盖板上的通孔匹配。
15.进一步的,所述导向部为第一导向柱且连接于所述清洁机的所述底板的上表面,所述雷达组件上设有与所述第一导向柱配合的导向环。
16.进一步的,所述导向部为第二导向柱且连接于所述清洁机的所述盖板的下表面,所述第二导向柱的自由端设有限位结构,所述雷达组件上设有与所述第二导向柱配合的导向环。
17.进一步的,还包括回拉结构,所述回拉结构设置于所述雷达组件与所述清洁机之间,所述雷达组件处于上位状态时,所述回拉结构对所述雷达组件有向下的作用力,其中,所述回拉结构设置于所述清洁机内。
18.进一步的,所述雷达组件的底面或所述导向部的下端设有缓冲件。
19.所述缓冲件在所述雷达组件下降回落到所述导向部下端的时候,起到缓冲作用,从而保护所述雷达组件。
20.进一步的,所述抬升机构包括丝杆电机组件,所述丝杆电机组件中丝杆的旋进将所述雷达组件向上抬升,所述丝杆电机组件中丝杆的回退使得所述雷达组件下方具有供所述雷达组件下降的空间。
21.进一步的,所述抬升机构包括气囊、气泵和气管,所述气囊设置于所述雷达组件的下方。
22.本实用新型还提供一种清洁机,包括上述的清洁机升降雷达结构。
23.本技术清洁机升降雷达结构及清洁机,当高度判断传感件判断到清洁机工作空间的高度过低,而威胁到雷达组件,锁止结构从锁止状态转变为释放状态,从而雷达组件下降回落向处于初始状态的抬升机构,进而保护雷达组件;当高度判断传感件判断到清洁机工作空间的高度安全时,抬升机构将雷达组件抬升到极限位置后锁止结构转变为锁止状态,雷达组件能正常工作。
附图说明
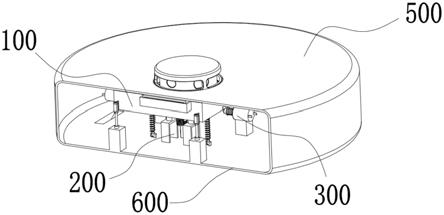
24.图1是本实用新型一实施例的升降雷达结构在清洁机中的设置位置示意图;
25.图2是本实用新型一实施例的升降雷达结构示意图(抬升机构未到达极限位置);
26.图3是本实用新型一实施例的升降雷达结构示意图(抬升机构到达极限位置);
27.图4是本实用新型一实施例的升降雷达结构示意图(抬升机构到达极限位置后回落);
28.图5是本实用新型一实施例的升降雷达结构中雷达组件的示意图;
29.图6是本实用新型一实施例的升降雷达结构中雷达组件的示意图(雷达罩隐去)。
30.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
31.应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
32.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”“上述”和“该”也可包括复数形式。应该进一步理解的是,本实用新型的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件、单元、模块和/或组件,但
是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、单元、模块、组件和/或它们的组。应该理解,当我们称元件被“连接”或“耦接”到另一元件时,它可以直接连接或耦接到其他元件,或者也可以存在中间元件。此外,这里使用的“连接”或“耦接”可以包括无线连接或无线耦接。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的全部或任一单元和全部组合。
33.本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语),具有与本实用新型所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语,应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样被特定定义,否则不会用理想化或过于正式的含义来解释。
34.参照图1
‑
6,本实用新型一实施例中,一种清洁机升降雷达结构,包括:
35.雷达组件100,所述雷达组件100可升降的设置于所述清洁机,其中,所述雷达组件100上升到极限位置时,所述雷达组件100露出于所述清洁机的盖板500;
36.高度判断传感件,所述高度判断传感件设置于所述清洁机,用于判断所述清洁机工作空间的高度;
37.抬升机构200,所述抬升机构200设置于所述清洁机内,用于抬升所述雷达组件100,所述抬升机构200自初始状态将所述雷达组件100抬升到所述极限位置后脱离于所述雷达组件100并返回初始状态;
38.至少一个导向部,所述导向部与所述雷达组件100配合,在所述雷达组件100的升降过程中起导向作用;
39.至少一个锁止结构300,所述锁止结构300设置于所述清洁机内,所述雷达组件100上升到所述极限位置时,所述锁止结构300对所述雷达组件100形成锁止状态或释放状态,其中,所述锁止结构300处于锁止状态时,所述雷达组件100被固定于所述极限位置,所述锁止结构300处于释放状态时,所述雷达组件100下降回落;
40.其中,所述抬升机构200与所述锁止结构300的状态根据所述高度判断传感件的信号调整。
41.当雷达组件100需要工作时,雷达组件100被锁止结构300固定于极限位置,此时抬升机构200处于初始状态。
42.当高度判断传感件判断到清洁机工作空间的高度过低,而威胁到雷达组件100,锁止结构300从锁止状态转变为释放状态,从而雷达组件100下降回落向处于初始状态的抬升机构200,进而保护雷达组件100。其中,上述高度判断传感件可以是超声波测距部件、红外测距部件或压力传感功能件(需要与雷达组件100上的碰撞感应组件配合使用)等。例如,当高度判断传感件为超声波测距部件或红外测距部件能探测到清洁机所处工作空间的高度,从而清洁机能判断所处的工作空间高度是否安全;而当高度判断传感件为压力传感功能件时,压力传感功能件需要与雷达组件100上的碰撞感应组件配合使用,当碰撞感应组件受到碰撞后,压力传感功能件所受到的压力发生变化,从而清洁机能判断所处的工作空间高度不安全;导向部与雷达组件100配合,在雷达组件100下降回落过程中起到导向作用。例如,导向部为导向柱,而雷达组件100上设有与导向柱配合的固定环结构。
43.当高度判断传感件判断到清洁机工作空间的高度安全时,抬升机构200将雷达组
件100抬升到极限位置后,锁止结构300转变为锁止状态,雷达组件100能正常工作,然后抬升机构200返回初始状态,从而能为雷达组件100的下降回落提供空间。在本实施例中,当雷达组件100不处于极限位置时,锁止结构300的锁止状态不可被激活,从而锁止结构300不会阻碍雷达组件100的上升。例如,雷达组件100在极限位置处设有感应开关,只有感应开关被雷达组件100触发后,锁止结构300才能被激活。
44.参照图4
‑
6,在一个实施例中,所述雷达组件100包括承载盒110、雷达罩120和雷达130;所述承载盒110为所述雷达组件100的底座,所述雷达罩120可在竖直方向上翻转的固定于所述承载盒110上,所述雷达130设置于所述承载盒110上,且位于所述雷达罩120的下方;
45.所述高度判断传感件为压力感应功能件,所述压力感应功能件设置于所述雷达罩120的下方用于感应所述雷达罩120运动状态变化。
46.锁止结构300与抬升机构200的状态根据压力感应功能件的信号调整。雷达罩120可以铰接于承载盒110上,从而雷达罩120能在竖直方向上发生一定程度的翻转。具体的,当清洁机工作空间的高度过低,使得雷达罩120遭遇到碰撞后,雷达罩120的状态随之发生改变(如产生上翻或下翻),设置于雷达罩120下方的压力感应功能件检测到压力改变,从而锁止结构300与抬升机构200的状态产生相应调整。压力感应功能件检测到压力则锁止结构300被调整为释放状态,压力感应功能件没有检测到压力则锁止结构300被调整为锁止状态。在一些实施例中,雷达罩120可在竖直方向上浮动的固定于所述承载盒110上(可以通过在雷达罩120与承载盒110之间设置弹性件实现),而当雷达罩120遭遇到碰撞后,雷达罩120的下沉,设置于雷达罩120下方的压力感应功能件检测到压力改变,从而锁止结构300与抬升机构200的状态产生相应调整。
47.参照图1和5,在一个实施例中,所述雷达罩120包括板体121和设于所述板体121上的罩体122,所述罩体122与所述盖板500上的通孔匹配。
48.由于只有罩体122突出于清洁机,因此通孔的尺寸只需匹配罩体122即可。雷达组件100上升过程中,罩体122露出于盖板500上的通孔,而板体121一直处于盖板500的下方,从而通孔的尺寸可缩小,保证了盖板500的完整性。
49.参照图1和5,在一个实施例中,所述导向部为第一导向柱且连接于所述清洁机的所述底板600的上表面,所述雷达组件100上设有与所述第一导向柱配合的导向环140。
50.第一导向柱与导向环140的配合,使得雷达组件100的升降更稳定。第一导向柱连接于清洁机的底板600的上表面为最直接的设计,也便于加工。
51.在一个实施例中,所述导向部为第二导向柱且连接于所述清洁机的所述盖板500的下表面,所述第二导向柱的自由端设有限位结构,所述雷达组件100上设有与所述第二导向柱配合的导向环140。
52.第二导向柱连接于清洁机的盖板500的下表面,从而不会占据额外的空间。相对于连接于底板600的上表面,当第二导向柱连接于清洁机的盖板500的下表面时,需要引入限位结构,限制雷达组件100自第二导向柱上脱出。
53.参照图2
‑
4,在一个实施例中,还包括回拉结构400,所述回拉结构400设置于所述雷达组件100与所述清洁机之间,所述雷达组件100处于上位状态时,所述回拉结构400对所述雷达组件100有向下的作用力,其中,所述回拉结构400设置于所述清洁机内。
54.当需求雷达组件100回退入清洁机时,锁止结构300解除对雷达组件100的固定;相对于采用抬升机构200驱动雷达组件100下降,回拉结构400能加速雷达组件100回退入清洁机的过程,且响应速度快。
55.在一个实施例中,所述回拉结构400为弹性件。
56.弹性件的弹力直接对雷达组件100作用,而无需其他动力源、节省功耗;同时弹性件的生产以及安装都非常简单。
57.在一个实施例中,所述雷达组件100的底面或所述导向部的下端设有缓冲件。
58.缓冲件在雷达组件100下降回落到导向部下端的时候,起到缓冲作用,从而保护雷达组件100。
59.在一个实施例中,所述抬升机构200包括丝杆电机组件,所述丝杆电机组件中丝杆的旋进将所述雷达组件100向上抬升,所述丝杆电机组件中丝杆的回退使得所述雷达组件100下方具有供所述雷达组件100下降的空间。
60.本实施例中,当需求雷达组件100露出于清洁机时,丝杆电机组件中丝杆的旋进将雷达组件100向上抬升,直至锁止结构300将雷达组件100固定后,丝杆电机组件中丝杆回退使得雷达组件100有下降回退的空间;当需求雷达组件100回退入清洁机时,锁止结构300解除对雷达组件100的固定,雷达组件100下降从而回退入清洁机。
61.在一个实施例中,所述抬升机构200包括气囊、气泵和气管,所述气囊设置于所述雷达组件100的下方。
62.当气泵对气囊充气时雷达组件100被抬升,当气囊泄气时,气囊不再支撑雷达组件100。气囊可以固定于雷达组件100的下表面或固定于雷达组件100下方的清洁机的底板上。通过气囊实现对雷达组件100的抬升有两大优势:一、通过气管传递气泵产生的动力,气泵在清洁机上的固定位置的选取自由度大;二、通过增加电磁阀、其他气管和其他气囊等可以使用单个气泵实现多个方向的动作。
63.本实用新型一实施例,一种清洁机,包括上述的清洁机升降雷达结构。
64.综上所述,本技术清洁机升降雷达结构及清洁机,当高度判断传感件判断到清洁机工作空间的高度过低,而威胁到雷达组件100,锁止结构300从锁止状态转变为释放状态,从而雷达组件100下降回落向处于初始状态的抬升机构200,进而保护雷达组件100;当高度判断传感件判断到清洁机工作空间的高度安全时,抬升机构200将雷达组件100抬升到极限位置后锁止结构300转变为锁止状态,雷达组件100能正常工作。
65.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。