1.本实用新型涉及机械自动化装置领域,具体涉及一种双急回翻锅晃锅机构。
背景技术:
2.现有炒菜翻锅技术针对炒菜时翻动食材采用人力翻锅或者机械机构翻锅。具有以下缺点:
3.1、人力体力消耗大;
4.2、机械机构不具有编程功能;
5.3、不能灵活修改参数满足新的工作要求;
6.4、不能实现与机器人之间的通信实现协同工作。
7.本实用新型要解决消除人工炒菜翻锅体力消耗,机械机构翻锅不能编程,不能实现与机器人通信协同的技术问题。
技术实现要素:
8.针对上述技术背景中的问题,本实用新型目的是提供一种双急回翻锅晃锅机构。
9.为了实现以上目的,本实用新型采用的技术方案为:
10.一种双急回翻锅晃锅机构,包括驱动装置、传感器、与锅具相连接的转轴以及双急回翻锅机构,所述转轴连接在所述驱动装置的输出轴上,所述驱动装置用于控制锅具的翻倒运动,所述传感器安装在所述转轴的前端、且所述传感器用于检测锅具与工作工位的位置;所述双急回翻锅机构包括支撑底座、带动所述锅具作往复运动的双急回机构以及驱动电机,所述双急回机构包括前后急回运动机构与上下急回运动机构,通过两者的复合运动使所述锅具实现椭圆轨迹的复合运动,所述驱动电机用于控制所述双急回机构的运动;所述驱动装置、驱动电机通过控制器分别与所述传感器电连接;当所述锅具置于对应的工作工位上方时,所述控制器通过所述传感器控制所述驱动电机工作带动所述双急回机构运动,同时使得所述驱动装置控制其输出轴停止转动。
11.进一步地,所述双急回机构包括第一摆动导杆、第二摆动导杆、前后运动导杆以及上下运动导杆,所述第一摆动导杆上设置有前后两个直线轴承,所述第一摆动导杆通过所述第一直线轴承与所述前后运动导杆连接,所述第一摆动导杆与第二摆动导杆复合在一起、并由同一转动轴转动驱动运动,所述转动轴通过链条与驱动电机驱动连接,所述转动轴的两端分别安装不同半径的旋转臂,所述第一旋转臂的一端与所述转动轴连接、其另一端通过第二直线轴承与所述第一摆动导杆连接,所述第二旋转臂的一端与所述转动轴连接、其另一端通过直线轴承与所述第二摆动导杆连接,所述第二摆动导杆与所述上下运动导杆之间通过直线轴承配合连接。
12.进一步地,所述驱动电机前端安装有减速机,所述驱动电机为伺服电机或步进电机。
13.更进一步地,所述驱动装置安装在所述前后运动导杆前端,所述驱动装置为前端
安装有减速机的伺服电机或步进电机。
14.进一步地,所述驱动电机和驱动装置可以由同一个运动控制器控制,也可以由两个运动控制器进行分别控制。
15.进一步地,所述传感器为红外传感器。
16.进一步地,通过电机转动带动臂旋转,使整个设备绕轴在合适角度内往复摆动
17.更进一步地,所述电机为前端安装有减速机的伺服电机或步进电机。
18.与现有技术相比,本实用新型具有以下优点:
19.本实用新型采取多轴运动控制器(以下简称:控制器),控制器具有编程功能,可以根据需要设置不同频率脉冲,进行控制伺服电机或步进电机,控制器有多个外设接口,可以实现与机器人之间的信号通信,实现工作协同。
20.与现有技术相比,本实用新型具有以下优点:
21.1、通过驱动装置、驱动电机控制锅具进行双急回晃锅运动、翻锅倒菜运动,轻松实现炒菜翻锅,降低人的体能消耗;通过传感器检测锅具的到位情况,进而控制锅具的晃锅运动或翻锅运动,实现了对锅具的自动化控制。
22.2、可以实现编程,修改参数,满足多样工作需求,灵活方便。
23.3、能够实现与机器人通信,协同工作。
24.积极效果:对于实现中餐标准化具有重要作用,推动中餐高标准、智能化发展有现实意义。对于普及人工智能、智能家居具有积极意义。
附图说明
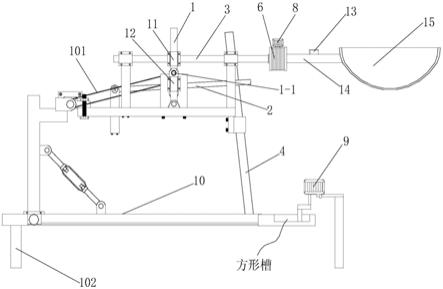
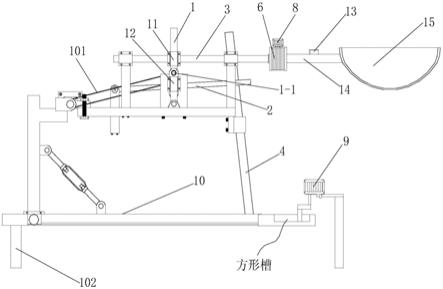
25.图1为本实用新型双急回翻锅晃锅机构的正视图结构示意图;
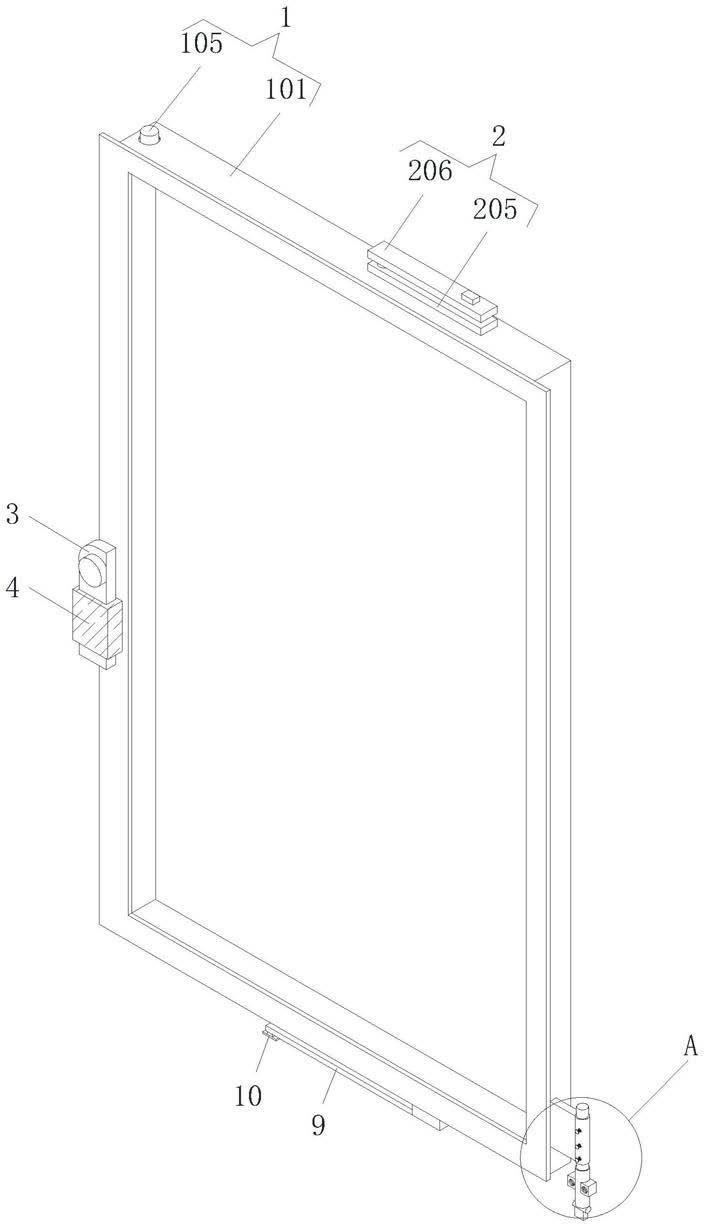
26.图2为本实用新型双急回翻锅晃锅机构的后视图结构示意图。
27.图中:第一摆动导杆
‑
1;第二摆动导杆
‑
2;前后运动导杆
‑
3;上下运动导杆
‑
4;转动轴
‑
5;减速机
‑
6;驱动电机
‑
7;驱动装置
‑
8;电机
‑
9;支撑底座
‑
10;第一直线轴承
‑
11;第二直线轴承
‑
12;传感器
‑
13;转轴
‑
14;锅具
‑
15;链条
‑
101;轴
‑
102;第一旋转臂
‑1‑
1;第二旋转臂
‑2‑
2。
具体实施方式
28.以下结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
29.如图1
‑
2所示,一种双急回翻锅晃锅机构,包括驱动装置8、传感器13、与锅具相连接的转轴14以及双急回翻锅机构,所述转轴14连接在所述驱动装置8的输出轴上,所述驱动装置8用于控制锅具15的翻倒运动,所述传感器13安装在所述转轴14的前端、且所述传感器13用于检测锅具与工作工位的位置;所述双急回翻锅机构包括支撑底座10、带动所述锅具15作往复运动的双急回机构以及驱动电机7,所述双急回机构包括前后急回运动机构与上下急回运动机构,通过两者的复合运动使所述锅具实现椭圆轨迹的复合运动,所述驱动电机7用于控制所述双急回机构的运动;所述驱动装置8、驱动电机7通过控制器分别与所述传感器13电连接;当所述锅具置于对应的工作工位上方时,所述控制器通过所述传感器13控制所述驱动电机7工作带动所述双急回机构运动,同时使得所述驱动装置8控制其输出轴停
止转动。
30.进一步地,所述双急回机构包括第一摆动导杆1、第二摆动导杆2、前后运动导杆3以及上下运动导杆4,所述第一摆动导杆1上设置有前后两个直线轴承11、12,所述第一摆动导杆1通过所述第一直线轴承11与所述前后运动导杆3连接,所述第一摆动导杆1与第二摆动导杆2复合在一起、并由同一转动轴5转动驱动运动,所述转动轴5通过链条101与驱动电机7驱动连接,所述转动轴5的两端分别安装不同半径的旋转臂1
‑
1、2
‑
2,所述第一旋转臂1
‑
1的一端与所述转动轴5连接、其另一端通过第二直线轴承12与轴配合与所述第一摆动导杆1连接,所述第二旋转臂2
‑
2的一端与所述转动轴5连接、其另一端通过直线轴承与所述第二摆动导杆2连接,所述第二摆动导杆2与所述上下运动导杆4之间通过直线轴承与轴配合连接。
31.在本实施例中,所述第一摆动导杆1与第二摆动导杆2成90度复合在一起、并由同一转动轴5转动驱动运动。
32.进一步地,所述驱动电机7前端安装有减速机,所述驱动电机7为伺服电机或步进电机。
33.更进一步地,所述驱动装置8安装在所述前后运动导杆3前端,所述驱动装置8为前端安装有减速机6的伺服电机或步进电机。
34.进一步地,所述驱动电机7和驱动装置8可以由同一个运动控制器控制,也可以由两个运动控制器进行分别控制。
35.进一步地,所述传感器13为红外传感器。利用红外传感器的高灵敏度,从而提高锅具的定位精度。
36.进一步地,通过电机9转动带动臂旋转,使整个设备绕轴102在合适角度内往复摆动。
37.更进一步地,所述电机9为前端安装有减速机的伺服电机或步进电机。
38.电机9转动带动臂旋转,使整个设备绕轴102在一定角度内往复摆动,第二电机8与电机9电机8配合工作,实现晃锅效果。
39.工作原理:本实用新型翻锅晃锅机构在使用前,将其置于炒菜工作位上方,此时通过传感器13检测锅具是否到达工位,若是则通过控制器控制驱动电机7工作,带动双急回机构运动,此时驱动装置8停止工作,但炒菜完成后,传感器13检测到锅具从工位离开,此时通过控制器控制驱动电机7停止工作,同时控制驱动装置8开始工作,实现翻锅出菜。
40.在驱动电机7开始工作时,通过链条101带动转动轴5转动,进而带动第一旋转臂1
‑
1和第二旋转臂2
‑
2转动,从而带动第一摆动导杆1和第二摆动导杆2同时做急回摆动,通过直线轴承与直线轴承上的轴分别驱动安装在直线轴承内的前后运动导杆3与上下运动导杆4分别同时运动,前后运动导杆3做前后急回运动,同时上下运动导杆4做上下急回运动,因为两个摆动导杆(1,2)设置的运动幅度不同,最终实现锅具的复合运动是一个椭圆轨迹,即实现翻锅动作。
41.在本实用新型中通过驱动电机7驱动机构实现翻锅功能;通过驱动装置8实现倒出锅内菜功能。
42.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述
的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内。本实用新型要求的保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。