1.本实用新型涉及焊接机器人技术领域,具体涉及一种新型焊接机器人工作站。
背景技术:
2.随着先进制造技术的发展,实现焊接产品制造的自动化、柔性化与智能化已经成为必然趋势,采用机器人焊接已经成为焊接技术自动化的主要标志。现有技术中,有一种焊接工作站,该工作站为焊接机器人与l型变位机配合构成的八轴机器人焊接系统,主要由焊接机器人、变位机、焊机及清枪站等构成,配合不同焊接工装可适用于多种工件的焊接。变位机主要具有翻转和回转功能,通过翻转功能可以使工件位于最佳的焊接位置,回转功能可以实现简体工件环缝自动焊接的目的,由于不同直径工件所需焊接速度不同,所以回转速度是伺服调速。但这种工作站存在以下不足:1.焊接机器人底座固定不动,其与变位机位置也固定不变,焊枪位置变化只能靠机械臂伸缩来实现,使得焊接空间范围狭小,工件体积过大时就无法兼顾所有焊道;2、焊接机器人底座安装在直线地轨上,其与变位机的相对位置点增加了不少,然而位置增加点分布在一条直线上,这样焊接空间范围具有一定局限性。
技术实现要素:
3.本实用新型的目的在于提供一种新型焊接机器人工作站,可以让焊接机器人围绕工件盘转动进行焊接工作,从而方便扩大对工件的焊接范围。
4.为实现上述目的,本实用新型公开的一种新型焊接机器人工作站,包括变位机和焊接机器人,所述变位机上设有工件安装盘,还包括回转体,所述回转体位于所述工件安装盘的下方,所述回转体与所述焊接机器人连接,所述焊接机器人可在所述回转体的带动下沿所述工件安装盘周围作弧形运动。
5.进一步地,所述回转体包括回转支承底座、回转支承、齿轮、减速机、电机、回转箱体,所述回转支承设置于所述回转支承底座上,所述回转支承底座一端与所述变位机上的变位机底座固定连接,所述齿轮与所述回转支承啮合,所述减速机与所述齿轮轴连接,所述电机与所述减速机轴连接。
6.进一步地,所述焊接机器人包括机器人、焊接机器人底座和机器人支座,所述机器人与所述机器人支座连接,所述机器人支座与所述焊接机器人底座连接;所述回转箱体一端与所述回转支承固定连接,一端与所述焊接机器人底座固定连接,所述齿轮、减速机、电机位于所述回转箱体内。
7.进一步地,所述变位机上还设置有第七轴旋转座和第八轴旋转座,所述第七轴旋转座固定设置于所述变位机底座上,所述第八轴旋转座与所述第七座旋转座可转动连接,所述工件安装盘安装在所述第八轴旋转座上。
8.进一步地,在所述机器人支座上设置有滑道i,所述机器人设置于所述滑道i上并可沿所述滑道i在所述机器人支座上上下滑动。
9.进一步地,在所述焊接机器人底座上设置有滑道ii,所述机器人支座设置于所述
滑道ii上并可沿所述滑道ii在所述焊接机器人底座上来回滑动。
10.本实用新型的有益效果是:焊接机器人工作站上设置回转体,该回转体的位于工件盘的下方,回转体带动焊接机器人围绕工件盘作弧形运动,这样可以对工件盘上的工件进行全方位的焊接,其焊接范围得到有效扩展。另外,在焊接机器人底座上和机器人支座上分别设置滑道,进一步扩大焊接机器人的运动范围。回转体与变位机连接起来时,方便吊装及布置。
附图说明
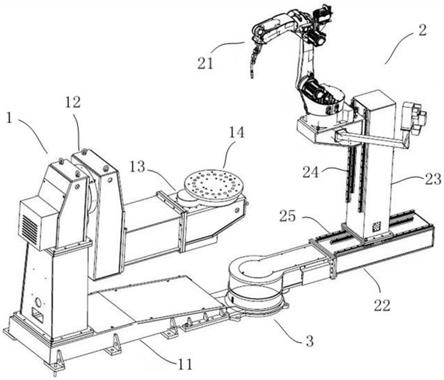
11.图1是本实用新型的新型焊接机器人工作站的结构示意图;
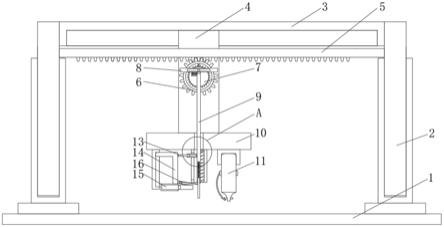
12.图2是回转连接体的结构示意图;
13.图中,1
‑
变位机,11
‑
变位机底座,12
‑
第七轴旋转座,13
‑
第八轴旋转座,14
‑
工件安装盘,2
‑
焊接机器人,21
‑
机器人,22
‑
焊接机器人底座,23
‑
机器人支座,24
‑
滑道i,25
‑
滑道ii,3
‑
回转体,31
‑
回转支承底座,32
‑
回转支承,33
‑
齿轮,34
‑
减速机,35
‑
电机,36
‑
回转箱体。
具体实施方式
14.下面结合附图及实施例对本实用新型作进一步详细说明。
15.如图1所示,一种新型焊接机器人工作站,包括变位机1和焊接机器人2,变位机1上设有工件安装盘14,待焊接的工件放置于工件安装盘14上。工作站还包括回转体3,回转体3位于工件安装盘14的下方,回转体3与焊接机器人2连接,焊接机器人2可在回转体3的带动下沿工件安装盘14周围作弧形运动。具体地,如图2所示,回转体3包括回转支承底座31、回转支承32、齿轮33、减速机34、电机35、回转箱体36,回转支承32设置于回转支承底座31上,回转支承底座31一端与变位机1上的变位机底座11固定连接,齿轮33与回转支承32啮合,减速机34与齿轮33轴连接,电机35与减速机34轴连接。回转支承32是固定不动的,齿轮33围绕回转支承32转动。在回转支承32的内侧设置有轴承,回转箱体36与轴承固定连接。回转箱体36以与轴承的固定处作为支撑点,当齿轮33在电机35和减速机34的带动下围绕回转支承32的外周旋转时,回转箱体36的支点随着回转支承31内的轴承的转动而转动。
16.具体地,焊接机器人2包括机器人21、焊接机器人底座22和机器人支座23,机器人21与机器人支座23连接,机器人支座23与焊接机器人底座22连接。回转箱体36一端与回转支承32固定连接,一端与焊接机器人底座22固定连接,齿轮33、减速机34、电机35位于回转箱体36内并与回转箱体36固定。上述结构中,通过设置回转体3,使回转支承32位于工件安装盘14的下方或侧下方,通过回转支承32的旋转,带动焊接机器人2整体围绕工件安装盘14转动,这样可以使机器人21对工件进行焊接工作时,能够比较容易地照顾到工件的各个焊接点处,其焊接范围得到有效扩展。将回转支承底座31与变位机底座11固定连接,可以使工作站形成一个整体,便于设置焊接机器人工作站的运行程序,同时也便于整体吊装及布置。本实施例中的回转支承32为外齿回转支承,也可以采用内齿回转支承。
17.变位机1上还设置有第七轴旋转座12和第八轴旋转座13,第七轴旋转座12固定设置于变位机底座11上,第八轴旋转座13与第七座旋转座12可转动连接,工件安装盘14安装在第八轴旋转座13上。
18.另外,如图1所示,在机器人支座23上设置有滑道i24,机器人21设置于滑道i24上并可沿滑道i24在机器人支座23上上下滑动。这种结构可以使机器人21的在焊接高度上可以有效调节。
19.另外,如图1所示,在焊接机器人底座22上设置有滑道ii25,机器人支座23设置于滑道ii25上并可沿滑道ii25在焊接机器人底座22上来回滑动。这种结构可以方便地对机器人21在对工件焊接的远近上进行调节。
20.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下可以作出的各种变化,都处于本实用新型权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。