1.本实用新型涉及软体无人机技术领域,尤其涉及一种软体无人机机翼倾斜机构
背景技术:
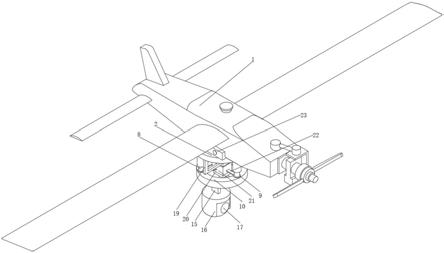
2.软体无人机是没有硬质骨架的无人机,由气囊充气成型,与传统无人机相比载荷能力强,续航能力高,可做超低速超低空飞行,具有良好的弹性,耐撞击而不受损坏,可用于航拍、航测、遥感等用途。现有的软体无人机在飞行过程中不能很好控制软体无人机的飞行状态,影响软体无人机的使用。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种软体无人机机翼倾斜机构,解决现有技术的不足。
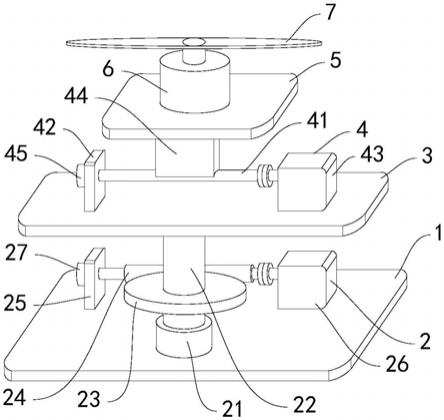
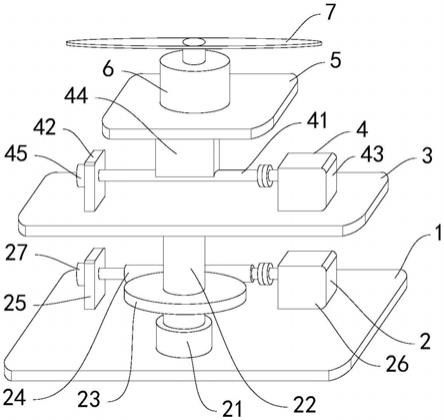
4.本实用新型解决上述技术问题的技术方案如下:一种软体无人机机翼倾斜机构,包括底座、水平转动机构、转动板、竖直摆动机构、摆动板、驱动电机和机翼;所述底座顶部通过所述水平转动机构与所述转动板底部连接,所述水平转动机构可驱动所述转动板在水平面内转动,所述转动板顶部通过所述竖直摆动机构与所述摆动板底部连接,所述竖直摆动机构可驱动所述摆动板在竖直平面内摆动,所述摆动板顶部安装有所述驱动电机,所述驱动电机的输出轴上安装有所述机翼。
5.本实用新型的有益效果是:该种软体无人机机翼倾斜机构,通过水平转动机构可驱动转动板在水平面内转动,通过竖直摆动机构可驱动摆动板在竖直平面内摆动,从而可驱动机翼在各个方向上倾斜,即可很好控制软体无人机的飞行状态,结构简单,制造成本低。
6.进一步:所述水平转动机构包括第一轴承、第一转轴、涡轮、蜗杆、第二轴承和第一电机,所述第一轴承安装在所述底座顶部,所述第一轴承内设有所述第一转轴,所述转动板安装在所述第一转轴上端,所述第一转轴上安装有涡轮,所述涡轮与所述蜗杆啮合,所述蜗杆一端设在所述第二轴承内,所述蜗杆另一端与所述第一电机的输出轴连接,所述第二轴承和所述第一电机均安装在所述底座顶部。
7.上述进一步方案的有益效果是:通过第一电机可带动蜗杆转动,蜗杆带动涡轮转动,涡轮带动第一转轴转动,从而带动水平板在水平面内转动。
8.进一步:所述竖直摆动机构包括第二转轴、第三轴承、第二电机和固定块,所述第二转轴一端设在所述第三轴承内,所述第二转轴另一端与第二电机的输出轴连接,所述第三轴承和所述第二电机均安装在所述转动板顶部,所述第二转轴中部安装有所述固定块,所述摆动板安装在所述固定块上。
9.上述进一步方案的有益效果是:通过第二电机可带动第二转轴转动,第二转轴带动固定块摆动,从而带动摆动板在竖直平面内摆动。
10.进一步:所述蜗杆靠近所述第一轴承的一端设有第一角度传感器,所述第二转轴
靠近所述第二轴承的一端设有第二角度传感器,所述第一电机、第二电机、所述第一角度传感器和所述第二角度传感器分别与控制器电连接,所述控制器与通讯模块电连接。
11.上述进一步方案的有益效果是:通过第一角度传感器可对蜗杆转动的角度进行检测,从而可对机翼倾斜的方向进行检测,通过第二角度传感器可对第二转轴转动的角度进行检测,从而对机翼倾斜的角度进行检测,检测的信息可发送到控制器,然后通过通讯模块发送到控制中心主机,控制中心主机可将控制信息通过通信模块发送至控制器,然后通过控制器对第一电机和第二电机进行控制,从而控制机翼倾斜的方向和角度。
12.进一步:所述第一角度传感器和所述第二角度传感器型号均为wdd
‑
d35
‑
d4c,所述控制器为mcs
‑
51系列单片机,所述通讯模块为gms通讯模块。
附图说明
13.图1为本实用新型实施例的一种软体无人机机翼倾斜机构结构示意图;
14.图2为本实用新型实施例的一种软体无人机机翼倾斜机构电路原理图;
15.图中:1、底座;2、水平转动机构;21、第一轴承;22、第一转轴;23、涡轮;24、蜗杆;25、第二轴承;26、第一电机;27、第一角度传感器;3、转动板;4、竖直摆动机构;41、第二转轴;42、第三轴承;43、第二电机;44、固定块;45、第二角度传感器;5、摆动板;6、驱动电机;7、机翼;8、控制器;9、通讯模块。
具体实施方式
16.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
17.实施例一
18.如图1
‑
2所示,一种软体无人机机翼倾斜机构,包括底座1、水平转动机构2、转动板3、竖直摆动机构4、摆动板5、驱动电机6和机翼7;底座1顶部通过水平转动机构2与转动板3底部连接,水平转动机构2可驱动转动板3在水平面内转动,转动板3顶部通过竖直摆动机构4与摆动板5底部连接,竖直摆动机构4可驱动摆动板5在竖直平面内摆动,摆动板5顶部安装有驱动电机6,驱动电机6的输出轴上安装有机翼7。
19.实施例二
20.在实施例一的基础上,水平转动机构2包括第一轴承21、第一转轴22、涡轮23、蜗杆24、第二轴承25和第一电机26,第一轴承21安装在底座1顶部,第一轴承21内设有第一转轴22,转动板3安装在第一转轴22上端,第一转轴22上安装有涡轮23,涡轮23与蜗杆24啮合,蜗杆23一端设在第二轴承25内,蜗杆24另一端与第一电机26的输出轴连接,第二轴承25和第一电机26均安装在底座1顶部,通过第一电机26可带动蜗杆24转动,蜗杆24带动涡轮23转动,涡轮23带动第一转轴21转动,从而带动水平板在水平面内转动。
21.实施例三
22.在实施例二的基础上,竖直摆动机构4包括第二转轴41、第三轴承42、第二电机43和固定块44,第二转轴41一端设在第三轴承42内,第二转轴41另一端与第二电机43的输出轴连接,第三轴承42和第二电机43均安装在转动板3顶部,第二转轴41中部安装有固定块44,摆动板5安装在固定块44上,通过第二电机43可带动第二转轴41转动,第二转轴41带动
固定块44摆动,从而带动摆动板5在竖直平面内摆动。
23.实施例四
24.在实施例三的基础上,蜗杆23靠近第一轴承21的一端设有第一角度传感器27,第二转轴41靠近第二轴承41的一端设有第二角度传感器45,第一电机26、第二电机43、第一角度传感器27和第二角度传感器45均与控制器8电连接,控制器8与通讯模块9电连接,通过第一角度传感器27可对蜗杆24转动的角度进行检测,从而可对机翼7倾斜的方向进行检测,通过第二角度传感器45可对第二转轴41转动的角度进行检测,从而对机翼7倾斜的角度进行检测,检测的信息可发送到控制器8,然后通过通讯模块9发送到控制中心主机,控制中心主机可将控制信息通过通信模块9发送至控制器8,然后通过控制器8对第一电机26和第二电机43进行控制,从而控制机翼7倾斜的方向和角度。
25.第一角度传感器27和第二角度传感器44型号均为wdd
‑
d35
‑
d4c,控制器8为mcs
‑
51系列单片机,通讯模块9为gms通讯模块。
26.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
27.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
28.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
29.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
30.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
31.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。