1.本发明涉及军用技术领域,具体涉及的是一种无人机栖停装置及栖停方法。
背景技术:
2.无人机是无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,具有用途广泛,成本低,效率较高,无人员伤亡风险,机动性能好,使用方便,体积小、对作战环境要求低,战场生存能力较强等优点,在现代战争中有极其重要的作用,被广泛应用于军事任务中。目前无人机对固定区域进行侦察,通常按照某种规划路线飞行,或者在固定位置悬停,采用这两种方式,由于无人机续航时间的限制,无人机不能长时间进行侦察,并且容易暴露目标,满足不了特定需求。
3.现有无人机的空中停留装置如中国专利cn205952315u所示,其采用在无人机顶部设置挂钩,并专门设置位于空中额停留杆,挂钩可悬挂在停留杆上。但是这种方式需要提前设置停留杆,在陌生或作战环境中无法设置停留杆。并且采用挂钩的方式无法栖停挂设在条状或块状物体上。
4.有鉴于此,本技术人针对现有技术中的上述缺陷深入研究,遂有本案产生。
技术实现要素:
5.本发明的主要目的在于提供一种无人机栖停装置及栖停方法,其具有栖停在条状或者块状物体上,进行长时间进行侦察的特点,不容易暴露目标,可以满足特定侦察的需求。
6.为了达成上述目的,本发明的解决方案是:
7.一种无人机栖停装置,其中,包括机架、第一夹杆、第二夹杆、压杆、两个柔性管和顶推机构,所述机架能够固定安装在无人机上,所述第一夹杆和第二夹杆分别转动连接在所述机架的两侧,所述第一夹杆和第二夹杆的上端均设置有夹爪;所述压杆设置在第一架杆和第二夹杆之间并位于夹爪下方,所述压杆顶部设置有抵顶板,两个所述柔性管的一端连接在抵顶板下方的所述压杆上,两个柔性管远离压杆的一端分别与所述第一夹杆和第二夹杆连接;所述顶推机构设置在所述压杆下方并能够驱动压杆向上移动,驱动所述压杆到位后,顶推机构向下复位,此时柔性管变形拱起,第一夹杆和第二夹杆上的夹爪保持张开状态;无人机飞抵条状或者块状物体下方,无人机在物体下面向上飞行使压杆的抵顶板顶住物体,柔性管恢复至伸长状态,从而实现第一夹杆和第二夹杆合闭,夹爪夹持悬挂在条状或者块状物体上进行侦查。
8.进一步,所述第一夹杆和第二夹杆均包括呈v形设置的第一夹持臂和第二夹持臂,所述第一夹持臂中部转动连接在机架上,所述夹爪转动连接在所述第二夹持臂的自由端上,所述夹爪与第二夹持臂之间设置有扭簧,所述扭簧中心轴与夹爪的转动轴同轴设置。
9.进一步,所述第一夹持臂上形成转动槽,所述机架上端容设在转动槽内并与第一夹持臂转动连接。
10.进一步,所述柔性管为空心管,所述柔性管的两端分别与压杆和夹杆过盈连接。
11.进一步,所述顶推机构包括舵机、钢丝绳和推杆,所述机架上设置有安装座,所述舵机固定安装在所述安装座上,所述安装座上设置有安装杆,所述推杆中部转动连接在所述安装杆上端,所述钢丝绳绕设在舵机上,所述钢丝绳的自由端与所述推杆的一端连接,所述推杆远离钢丝绳的一端能够抵顶在所述压杆的下端面。
12.进一步,所述推杆远离钢丝绳的一端设置顶推座,所述抵推座上形成有容纳槽,压杆的下端面能够容设在所述容纳槽内,所述推杆通过顶推座抵顶压杆的下端面。
13.进一步,所述机架下端形成有两个安装板,所述安装板上形成有条形安装孔。
14.进一步,两个所述夹爪相对的一面设置有齿部。
15.进一步,所述抵顶板呈t形设置的第一抵顶条和第二抵顶条,所述第一抵顶条的长度方向平行于第一夹杆和第二夹杆所在平面,所述第二抵顶条的长度方向垂直于第一抵顶条的长度方向。
16.一种无人机栖停方法,其中,包括使用上述无人机栖停装置,还包括以下步骤:
17.①
无人机栖停装置安装在无人机上,舵机转动拉动钢丝绳,使推杆上撬,向上推动压杆使柔性管变形拱起,第一夹杆和第二夹杆驱使夹爪保持打开;
18.②
通过操作地面站,控制无人机运动到目标区域,在目标区域附近寻找条状或者块状物体;
19.③
无人机在物体下面向上飞行使压杆顶住物体,从而实现夹爪合闭,夹住物体或者悬挂在条状物体下面,动力关闭,由于扭簧的作用,夹爪牢牢的夹住物体和悬挂在条状物体下面,进行长时间的侦察;
20.④
侦察结束后,舵机转动拉动钢丝绳,使推杆上撬,向上推动压杆使柔性管变形拱起,从而使夹爪打开,无人机飞离侦察位置。
21.采用上述结构后,本发明涉及的一种无人机栖停装置及栖停方法,其至少具有以下有益效果:
22.一、无人机栖停装置安装在无人机上,初始时,所述顶推机构将压杆向上推,随着压杆的上升,所述柔性管发生弹性变形,压杆上升和柔性管变形过程中,第一夹杆和第二夹杆绕着机架上的铰接轴进行转动,从而将夹爪张开。此时柔性管的两端与夹杆和压杆抵顶处于稳定状态,即使顶推机构向下复位,压杆位置保持不变,不会随之下降,第一夹杆和第二夹杆保持张开状态。
23.二、作战人员通过安装板把栖停装置固定在无人机上,通过操作地面站,控制无人及运动到目标区域,在目标区域附近寻找条状或者块状物体;无人机在物体下面向上飞行使压杆顶住物体,触发柔性管回弹,从而实现第一夹爪和第二夹爪合闭,第一夹爪和第二夹爪夹住物体或者悬挂在条状物体下面,随后动力关闭,由于扭簧的作用,夹爪牢牢的夹住物体和悬挂在条状物体下面,无人机进行长时间的侦察。
24.三、侦察结束后,顶推机构向上将压杆向上推,顶推机构可以采用舵机转动拉动钢丝绳,实现推杆向上推动压杆的方式,向上的压杆使柔性管变形拱起,从而使夹爪打开,无人机飞离侦察位置。
25.与现有技术相比,本发明采用独特的第一夹杆、第二夹杆、压杆、两个柔性管组合方式,实现无人机向上抵顶条状或块状物体后,第一夹杆和第二夹杆能够牢牢夹紧物体,从
而实现长时间停留。第一夹杆和第二夹杆能够根据侦查区域现场的情况灵活选择栖停地点,并且拆装方便,能够更好的适应战场环境,不容易暴露目标,提高作战能力。
附图说明
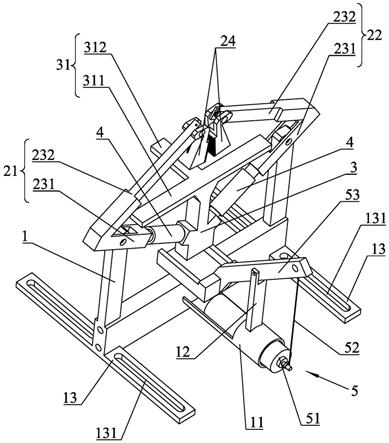
26.图1为本发明涉及一种无人机栖停装置的立体结构示意图。
27.图2为本发明的正面结构示意图。
28.图3为本发明的侧视结构示意图。
29.图4为本发明另一角度的立体结构示意图。
30.图5为夹爪保持张开状态时的结构示意图。
31.图6为夹爪保持闭合状态时的结构示意图。
32.图中:
33.机架1;安装座11;安装杆12;安装板13;条形安装孔131;
34.第一夹杆21;第二夹杆22;第一夹持臂231;第二夹持臂232;转动槽233;夹爪24;齿部241;扭簧242;
35.压杆3;抵顶板31;第一抵顶条311;第二抵顶条312;
36.柔性管4;
37.顶推机构5;舵机51;钢丝绳52;推杆53;顶推座531;容纳槽532。
具体实施方式
38.为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
39.如图1至图6所示,其为本发明涉及的一种无人机栖停装置,包括机架1、第一夹杆21、第二夹杆22、压杆3、两个柔性管4和顶推机构5,所述机架1能够固定安装在无人机上,所述第一夹杆21和第二夹杆22分别转动连接在所述机架1的两侧,所述第一夹杆21和第二夹杆22的上端均设置有夹爪24,更进一步的,两个所述夹爪24相对的一面设置有齿部241,提高夹持时的摩擦力;所述压杆3设置在第一架杆和第二夹杆22之间并位于夹爪24下方,所述压杆3顶部设置有抵顶板31,两个所述柔性管4的一端连接在抵顶板31下方的所述压杆3上,两个柔性管4远离压杆3的一端分别与所述第一夹杆21和第二夹杆22连接;所述顶推机构5设置在所述压杆3下方并能够驱动压杆3向上移动,驱动所述压杆3到位后,顶推机构5向下复位,此时柔性管4变形拱起,第一夹杆21和第二夹杆22上的夹爪24保持张开状态;无人机飞抵条状或者块状物体下方,无人机在物体下面向上飞行使压杆3的抵顶板31顶住物体,柔性管4恢复至伸长状态,从而实现第一夹杆21和第二夹杆22合闭,夹爪24夹持悬挂在条状或者块状物体上进行侦查。
40.优选地,所述顶推机构5包括舵机51、钢丝绳52和推杆53,所述机架1上设置有安装座11,所述舵机51固定安装在所述安装座11上,所述安装座11上设置有安装杆12,所述推杆53中部转动连接在所述安装杆12上端,所述钢丝绳52绕设在舵机51上,所述钢丝绳52的自由端与所述推杆53的一端连接,所述推杆53远离钢丝绳52的一端能够抵顶在所述压杆3的下端面。所述顶推机构5采用舵机51、钢丝绳52和推杆53的方式,使得无人机栖停装置重量分布更加均匀,更加适合小型化无人机设备进行使用。
41.这样,本发明涉及的一种无人机栖停装置及栖停方法,无人机栖停装置安装在无人机上,初始时,所述顶推机构5将压杆3向上推,随着压杆3的上升,所述柔性管4发生弹性变形,压杆3上升和柔性管4变形过程中,第一夹杆21和第二夹杆22绕着机架1上的铰接轴进行转动,从而将夹爪24张开。此时柔性管4的两端与夹杆和压杆3抵顶处于稳定状态,即使顶推机构5向下复位,压杆3位置保持不变,不会随之下降,第一夹杆21和第二夹杆22保持张开状态。
42.作战人员通过安装板13把栖停装置固定在无人机上,通过操作地面站,控制无人及运动到目标区域,在目标区域附近寻找条状或者块状物体;无人机在物体下面向上飞行使压杆3顶住物体,触发柔性管4回弹,从而实现第一夹爪24和第二夹爪24合闭,第一夹爪24和第二夹爪24夹住物体或者悬挂在条状物体下面,随后动力关闭,由于扭簧242的作用,夹爪24牢牢的夹住物体和悬挂在条状物体下面,无人机进行长时间的侦察。侦察结束后,顶推机构5向上将压杆3向上推,顶推机构5可以采用舵机51转动拉动钢丝绳52,实现推杆53向上推动压杆3的方式,向上的压杆3使柔性管4变形拱起,从而使夹爪24打开,无人机飞离侦察位置。条状或块状物体可以为电线、树枝或者石块等空中悬伸出的物体。
43.优选地,所述第一夹杆21和第二夹杆22均包括呈v形设置的第一夹持臂231和第二夹持臂232,第一夹持臂231和第二夹持臂232一端相互连接。所述第一夹持臂231中部转动连接在机架1上,所述夹爪24转动连接在所述第二夹持臂232的自由端上,所述夹爪24与第二夹持臂232之间设置有扭簧242,所述扭簧242中心轴与夹爪24的转动轴同轴设置。所述第一夹持臂231转动在机架1上,所述第二夹持臂232设置在第一夹持臂231远离柔性管4的一端,扩大了第二夹持臂232上的夹爪24张开的距离,对于战场环境中不同宽度的条状或块状物体,具有更佳的适应性。通过设置扭簧242,使得夹爪24能够更好的贴合物品表面,所述第二夹持臂232上设置有供扭簧242一端插入的限位孔,所述第二夹持臂232与所述夹爪24之间还可以设置限制夹爪24转动范围的限位机构,避免夹爪24在自然状态角度过大,而不利于夹爪24的夹持面与物体接触。
44.优选地,所述第一夹持臂231上形成转动槽233,所述机架1上端容设在转动槽233内并与第一夹持臂231转动连接。这样,所述机架1上与第一夹持臂231转动的部分容设在所述转动槽233内,所述转动槽233限制了所述第一夹持臂231的偏转,只能绕着设定的转动轴线进行转动,如此,整个机构结构设计更加合理,降低了机构的故障率。
45.优选地,所述柔性管4为空心管,所述柔性管4的两端分别与压杆3和夹杆过盈连接。所述柔性管4壁厚比较小,受压容易变形,回弹性比较好,所述柔性管4的两端与压杆3和夹杆过盈套设固定连接;所述柔性管4采用高分子材料制成,如橡胶材质进行制作,当然也可以采用其他受压变形,回弹较好的材料进行制作。
46.优选地,所述推杆53远离钢丝绳52的一端设置顶推座531,所述抵推座531上形成有容纳槽532,压杆3的下端面能够容设在所述容纳槽532内,所述推杆53通过顶推座531抵顶压杆3的下端面。所述容纳槽532的侧壁一定程度上限制了所述压杆3下端的横向偏移,使得避免压杆3与所述顶推座531发生滑脱;随着抵推座531的上升,压杆3的下端面在所述容纳槽532内进行小范围的滑动。当推杆53回位时,所述容纳槽532与所述压杆3的下端进行分离。
47.优选地,所述机架1下端形成有两个安装板13,所述安装板13上形成有条形安装孔
131。所述机架1通过安装板13和条形安装孔131进行可拆卸固定安装在无人机上。
48.优选地,所述抵顶板31呈t形设置的第一抵顶条311和第二抵顶条312,所述第一抵顶条311的长度方向平行于第一夹杆21和第二夹杆22所在平面,所述第二抵顶条312的长度方向垂直于第一抵顶条311的长度方向。通过设置第一抵顶条311和第二抵顶条312,增大了抵顶板31的抵顶有效面积,使得物体抵顶所述抵顶板31时,能够更平稳的进行抵顶。
49.本发明还提供一种无人机栖停方法,包括使用上述无人机栖停装置,还包括以下步骤:
50.①
无人机栖停装置安装在无人机上,舵机51转动拉动钢丝绳52,使推杆53上撬,向上推动压杆3使柔性管4变形拱起,第一夹杆21和第二夹杆22驱使夹爪24保持打开;
51.②
通过操作地面站,控制无人机运动到目标区域,在目标区域附近寻找条状或者块状物体;
52.③
无人机在物体下面向上飞行使压杆3顶住物体,从而实现夹爪24合闭,夹住物体或者悬挂在条状物体下面,动力关闭,由于扭簧242的作用,夹爪24牢牢的夹住物体和悬挂在条状物体下面,进行长时间的侦察;
53.④
侦察结束后,舵机51转动拉动钢丝绳52,使推杆53上撬,向上推动压杆3使柔性管4变形拱起,从而使夹爪24打开,无人机飞离侦察位置。
54.与现有技术相比,本发明采用独特的第一夹杆21、第二夹杆22、压杆3、两个柔性管4组合方式,实现无人机向上抵顶条状或块状物体后,第一夹杆21和第二夹杆22能够牢牢夹紧物体,从而实现长时间停留。第一夹杆21和第二夹杆22能够根据侦查区域现场的情况灵活选择栖停地点,并且拆装方便,能够更好的适应战场环境,不容易暴露目标,提高作战能力。
55.上述实施例和图式并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。