1.本发明涉及医疗器械领域,涉及一种超声手术刀的控制方法及系统,特别为一种基于剪切结束判断模型的控制方法和系统、及设置有该系统的发生器、超声刀外科器械及超声刀系统。
背景技术:
2.软组织超声切割止血手术系统(简称超声刀系统),是指将通过压电转换器(通过能量发生器将电能传递至压电转换器,由压电转换器将电能转换为机械能)获得的超声振动进一步放大,并由超声刀杆将放大后的超声振动用于对软组织的切割和凝闭的器械。临床用这种器械可在较低温度和较少出血的情况下实现病灶切除,并能确保最小的组织侧向热损伤。随着微创外科手术的普及,超声手术刀已经成为一种常规手术器械。
3.超声刀系统主要由发生器、换能器和超声刀杆组成,如图1所示,超声刀的换能器11和超声刀外壳12配接在一起,套管13位于超声刀外壳12的远端,位于最远端的超声刀杆14在套管13内部与换能器11耦接在一起,换能器11通过线缆15与发生器(未示出)连接。发生器中超声频率的电流传导至换能器,换能器将电能转化为前后振动的机械能,通过超声刀杆的传递和放大使超声刀杆末端(又称超声刀头)以一定频率(例如55.6khz)振动,摩擦产生的热量导致与刀尖接触的组织细胞内水汽化,蛋白质氢键断裂,细胞崩解重新融合,组织凝固后被切开;在切割血管时,超声刀杆与组织蛋白接触,通过机械振动产生热量,导致组织内胶原蛋白结构被破坏,造成蛋白凝固,进而封闭血管,达到止血目的。
4.一般来讲,超声刀的工作原理是根据实际阻抗变化以及压电晶体温度变化等因素,实时利用锁相算法改变换能器工作频率使换能器工作在最大工作效率。现有超声刀在使用过程中,单纯依靠医生观察判断超声刀剪切组织是否结束,这样会有较大误差:如果提前结束剪切会造成手术失败,延迟结束剪切则会导致钳口一直磨损垫片,会产生非常高的刀头温度,降低刀具寿命并造成潜在的烫伤风险。
5.现有技术cn201910124064.5揭示了一种自适应切割止血控制方法,其方法是“获取信号采集器采集的所述目标生物组织产生的反馈信号,并计算所述目标生物组织的生物阻抗,根据所述目标生物组织的生物阻抗确定刀具驱动模块所需产生的驱动信号的目标电流值或目标电压值,根据所述目标电流值或所述目标电压值调节所述刀具驱动模块产生的所述驱动信号。”该现有技术目的是为了基于阻抗值调整激励电流来提高刀具的切割效率,而采用的是根据阻抗值查询生物组织数据库来实现的,也就是查表来实现的,这种控制方式智能化程度不高并且会有较大的误差。鉴于此,本技术人在之前提出了一种基于实时工作频率或实时阻抗进行数据处理并自适应判断组织剪切点的方法系统。
6.但是超声刀工作过程中,超声刀头夹持组织时,夹持的组织类型、压力、以及夹持位置和组织面积都会影响阻抗,并且超声刀手术剪切过程中,阻抗值r会随着夹持压力、位置和组织面积的变化而变化。超声刀工作过程中阻抗的一种变化曲线如图2所示,其中阻抗值经过标准化处理,可以为任意单位。图中总的剪切时间大概为16s,阻抗随剪切过程进行
不断变化:0~4s为组织剪切开始阶段,由于温度上升,组织逐渐干燥,阻抗剧烈变化;4~14s为组织剪切分离阶段,阻抗变化较慢;14s~16s为剪切结束阶段,在剪切结束阶段阻抗值逐渐下降,具有较为明显的变化特征。实际手术过程中,超声刀剪切过程中阻抗变化不限于图中变化趋势,对于不同的超声刀头、剪切组织类型、剪切环境和剪切方式等,阻抗会呈现复杂多样的变化特征。
7.超声刀剪切工作过程中,发生器会通过频率控制算法不断调整超声刀工作频率,使换能器始终在谐振状态下工作。换能器工作频率受阻抗和温度等因素影响。超声刀工作过程中的一种频率变化和频率一阶导数变化如图3所示。频率一阶导数df可以体现频率的变化率,可以为频率f的一阶差分,计算公式为:
8.df[k]=f[k]
‑
f[k
‑
1]
ꢀꢀꢀ
(1)
[0009]
其中df[k]为一阶导数值,f[k]、f[k
‑
1]为频率值。
[0010]
图中频率和频率一阶导数均经过标准化处理,单位可以为任意单位。剪切时长大概为13s,可以看到剪切过程中频率和频率一阶导数均具有明显变化:0~4s为剪切开始阶段,由于温度快速上升及阻抗剧烈变化,频率一阶导数变化较为明显;4~11s为剪切分离阶段,频率基本呈线性变化,频率一阶导数基本不变;11~13s剪切结束阶段,由于组织分离,温度下降,频率会有小幅度上升过程,频率一阶导数先快速增大然后快速下降,变化特征较为明显。实际手术过程中,频率和一阶导数变化不限于图中变化趋势,工作频率会受刀具种类、剪切组织类型、实时阻抗和温度等因素影响,也会呈现复杂多样的变化特征。
[0011]
除了阻抗、频率和频率一阶导数外,电压电流相位差也会随着剪切过程而变化,而且这些特征会受到超声刀头刀杆的外形材料、剪切组织类型、剪切环境等因素影响。
技术实现要素:
[0012]
本发明为了解决上述现有技术的问题,提供了一种基于剪切结束判断模型的控制方法及系统、及设置有该系统的发生器、超声刀外科器械及超声刀系统。
[0013]
为解决以上技术问题,本发明的技术方案为:
[0014]
一种基于剪切结束判断模型的控制方法,包括如下步骤,
[0015]
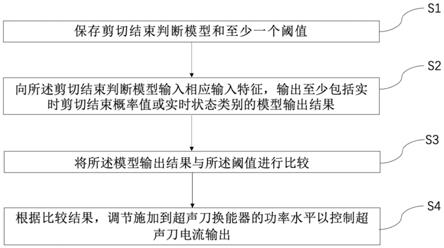
s1、保存剪切结束判断模型和至少一个阈值;
[0016]
s2、向所述剪切结束判断模型输入相应输入特征,输出至少包括实时剪切结束概率值或实时状态类别的模型输出结果;
[0017]
s3、将所述模型输出结果与所述阈值进行比较;
[0018]
s4、根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出,当判断超声刀已经达到组织剪切结束点时,在该时间点降低超声刀控制电流并产生结束剪切提示。
[0019]
优选的,所述阈值为根据不同剪切状态相对应的类别数值集,步骤s2中的模型输出结果为所述类别数值集中的其中一个类别数值。
[0020]
优选的,所述阈值为至少一个位于0
‑
1内的小数值,该小数值表示预定结束概率阈值,步骤s3中将步骤s2输出实时剪切结束概率值与该概率阈值进行比较。
[0021]
优选的,所述剪切结束判断模型为神经网络算法模型,包括前馈神经网络、记忆神经网络、注意力神经网络的一种或多种算法模型组合,模型训练方法为监督学习、半监督学
习、无监督学习和强化学习的一种或多种组合。
[0022]
优选的,所述模型训练方法具体为从训练数据集中取输入特征,并输入神经网络模型计算每个神经元的中间值和梯度值,模型的损失函数可以为交叉熵、均方误差mse等损失函数,并利用梯度下降法进行权重更新,重复以上过程直到模型达到预定的停止条件,达到停止条件后停止训练并保存模型。
[0023]
优选的,所述模型训练过程中需要定期采集模型的所有输入特征信息以及训练标签,所述训练标签或为类别数值集,分为至少两类状态类别,采用整数数值来表示;训练标签或为位于0
‑
1内的概率值,该概率值由一个概率分布采样得到,该概率分布可以为均匀分布或正态分布。
[0024]
优选的,所述剪切结束判断模型的输入特征包括工作反馈参数,物理结构特征参数,环境参数的一种或多种组合。
[0025]
优选的,所述工作反馈参数包括但不限于实时电压u、实时电流i、实时谐振频率f、频率一阶导数df、功率p、阻抗r、电压电流相位差φ;所述物理结构特征参数包括但不限于超声刀杆材料、长度、形状;所述环境参数包括但不限于环境温度、环境湿度。
[0026]
优选的,所述实时电压u和实时电流i由发生器通过电流电压传感器实时采样得到,所述实时谐振频率f、频率一阶导数df、功率p、阻抗r、电压电流相位差φ由采样值经过fft数学运算得到:所述超声刀刀杆材料、长度、形状以及超声刀型号、待剪切的组织保存在超声刀或者发生器的存储芯片中,发生器直接读取相应的存储芯片得到;环境参数通过传感器进行实时测量得到。
[0027]
优选的,所述剪切结束判断模型由层和相应的神经元及权重构成,权重参数和应用程序保存在发生器内存中,内存为flash、eeprom或者其他非易失存储设备,应用程序在处理器中运行,所述处理器或为存在于所述发生器中的arm、dsp、fpga、cpu、gpu或者asic芯片,或为通过网络连接的远程服务器。
[0028]
本发明还揭示一种基于剪切结束判断模型的控制系统,包括:
[0029]
存储单元,用于保存剪切结束判断模型和至少一个阈值;
[0030]
处理单元,用于向所述剪切结束判断模型输入相应输入特征,输出至少包括实时剪切结束概率值或实时状态类别的模型输出结果;
[0031]
比较单元,用于将所述模型输出结果与所述阈值进行比较;
[0032]
调节单元,用于根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出,当判断超声刀已经达到组织剪切结束点时,在该时间点降低超声刀控制电流并产生结束剪切提示。
[0033]
本发明还揭示了一种基于剪切结束判断模型进行控制的发生器,包括:
[0034]
控制电路,所述控制电路耦接到存储器,所述控制电路被配置为能够:
[0035]
保存剪切结束判断模型和至少一个阈值;
[0036]
向所述剪切结束判断模型输入相应输入特征,输出至少包括实时剪切结束概率值或实时状态类别的模型输出结果;
[0037]
将所述模型输出结果与所述阈值进行比较;
[0038]
根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出,当判断超声刀已经达到组织剪切结束点时,在该时间点降低超声刀控制电流并产生结束剪切
提示。
[0039]
优选的,所述控制电路被配置为向所述剪切结束判断模型输入的输入特征包括工作反馈参数,物理结构特征参数,环境参数的一种或多种组合。
[0040]
优选的,所述工作反馈参数包括但不限于实时电压u、实时电流i、实时谐振频率f、频率一阶导数df、功率p、阻抗r、电压电流相位差φ;所述物理结构特征参数包括但不限于超声刀杆材料、长度、形状;所述环境参数包括但不限于环境温度、环境湿度。
[0041]
本发明还揭示了一种基于剪切结束判断模型的超声刀外科器械,包括:
[0042]
超声机电系统,所述超声机电系统包括经由超声波导联接到超声刀的超声换能器;以及
[0043]
发生器,所述发生器被配置为向所述超声换能器供应功率,其中所述发生器包括控制电路,所述控制电路被配置为能够:
[0044]
保存剪切结束判断模型和至少一个阈值;
[0045]
向所述剪切结束判断模型输入相应输入特征,输出至少包括实时剪切结束概率值或实时状态类别的模型输出结果;
[0046]
将所述模型输出结果与所述阈值进行比较;
[0047]
根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出,当判断超声刀已经达到组织剪切结束点时,在该时间点降低超声刀控制电流并产生结束剪切提示。
[0048]
优选的,所述控制电路被配置为向所述剪切结束判断模型输入的输入特征包括工作反馈参数,物理结构特征参数,环境参数的一种或多种组合,所述工作反馈参数包括但不限于实时电压u、实时电流i、实时谐振频率f、频率一阶导数df、功率p、阻抗r、电压电流相位差φ;所述物理结构特征参数包括但不限于超声刀杆材料、长度、形状;所述环境参数包括但不限于环境温度、环境湿度。
[0049]
本发明还揭示了一种基于剪切结束判断模型的超声刀系统,包括处理器和非易失存储设备,其中所述非易失存储设备包含应用程序,所述应用程序在由所述处理器执行时致使所述处理器:
[0050]
保存剪切结束判断模型和至少一个阈值;
[0051]
向所述剪切结束判断模型输入相应输入特征,输出至少包括实时剪切结束概率值或实时状态类别的模型输出结果;
[0052]
将所述模型输出结果与所述阈值进行比较;
[0053]
根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出,当判断超声刀已经达到组织剪切结束点时,在该时间点降低超声刀控制电流并产生结束剪切提示。
[0054]
优选的,所述剪切结束判断模型由层和相应的神经元及权重构成,权重参数和应用程序保存在发生器内存中,内存为flash、eeprom或者其他非易失存储设备,应用程序在处理器中运行,所述处理器或为存在于所述发生器中的arm、dsp、fpga、cpu、gpu或者asic芯片,或为通过网络连接的远程服务器。
[0055]
本发明的有益效果主要体现在:使用机器学习算法模型来提取剪切状态变化特征,有效判断剪切结束点,控制输出功率并提醒医生结束剪切,从而减小医生操作压力,在
达到最佳手术效果的同时保护刀具,降低刀具磨损,延长刀具寿命,降低潜在高温风险。
附图说明
[0056]
图1是现有技术中超声刀的结构配置示意图;
[0057]
图2是超声刀剪切工作过程中阻抗的一种变化曲线示意图;
[0058]
图3是超声刀剪切工作过程中频率及频率一阶导数的一种变化曲线示意图;
[0059]
图4是一种典型的多层前馈神经网络结构示意图;
[0060]
图5是一种典型的卷积神经网络结构示意图;
[0061]
图6是本发明采用的一种卷积神经网络结构示意图;
[0062]
图7是本发明模型建立训练保存方法示意图;
[0063]
图8是本发明基于模型进行剪切结束判断的流程图;
[0064]
图9是本发明基于剪切结束判断模型进行控制的第一种实施例的流程图;
[0065]
图10是本发明基于剪切结束判断模型进行控制的第二种实施例的流程图;
[0066]
图11是本发明根据基于剪切结束判断模型进行后续控制的流程图。
具体实施方式
[0067]
以下将结合附图所示的具体实施方式对本发明进行详细描述。但这些实施方式并不限于本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
[0068]
本发明揭示了一种机器学习算法模型,具体为神经网络算法模型,人工神经网络算法模型是一种受人脑神经系统启发而构造的数学模型,与生物神经元类似,由多个节点(人工神经元)互相连接而成,可以用来对数据之间的复杂关系进行建模。不同节点之间的连接被赋予不同的权重,每个权重代表一个节点对另外一个节点的影响大小。每个节点代表一种特定函数,来自其他节点的信息经过其相应的权重综合计算,输入到一个激活函数中并得到一个新的活性值。激活函数用来引入非线性元素,增加神经网络的表达能力,常用的激活函数有sigmoid,tanh,relu等。
[0069]
从系统观点来看,人工神经元是由大量神经元通过极其丰富和完善的连接而构成的自适应非线性动态系统。目前最常用的神经网络学习算法为反向传播算法,优化方法为梯度下降算法。理论上,一个两层的神经网络就可以逼近任意的函数,增加网络层数可以让神经网络在相同的神经元数量下具有更强的表示能力。目前比较常用的神经网络模型有前馈神经网络模型、记忆神经网络模型及注意力神经网络模型等:多层感知机(multilayer perceptron,mlp)和卷积神经网络(convolutional neural network,cnn)为前馈神经网络模型;循环神经网络(recurrent neural network,rnn)为记忆神经网络模型,常用的rnn模型包括门控神经单元(gate recurrent unit,gru)和长短期记忆神经网络(long short
‑
term memory,lstm);注意力神经网络模型包括transformer等。
[0070]
一个典型的多层前馈神经网络模型如图4所示,包含输入层,若干个隐藏层和一个输出层,输入信息x经过每个层进行前向传播最终得到输出y。
[0071]
每一层的信息传播公式为:
[0072]
a
l
=f
l
(w
l
a
l
‑1 b
l
)
ꢀꢀꢀ
(2)
[0073]
其中a
l
‑1为第l层输入,a
l
为第l层输出,f
l
为第l层神经元的激活函数,w
l
为第l
‑
1层到第l层的权重矩阵,b
l
为第l
‑
1到第l层的偏置。
[0074]
记忆神经网络模型在前馈神经网络基础上增加了记忆能力,常用来处理时序数据,常用的记忆神经网络包括rnn、gru、lstm等。gru和lstm具有长期的记忆能力,能够处理长时间序列。
[0075]
常用的全连接神经网络mlp模型的神经元数量会随着输入特征维度的升高而急剧增加,最终导致整个神经网络训练效率非常低,并且容易出现过拟合。一般可以利用卷积神经网络来代替全连接神经网络来进行图像有效特征的提取,卷积神经网络利用卷积核来模拟生物视觉系统中的感受野。目前常用的卷积神经网络结构如图5所示,一般是由多个卷积层和多个全连接层堆叠而成。
[0076]
本发明的剪切结束判断模型可以基于机器学习算法模型包括神经网络算法模型中的一种或者多种算法模型组合。如图6所示,本发明采用的优选实施例的神经网络模型基于卷积单元和残差结单元结构构成。卷积层采用了两种卷积核,分别为1
×
1卷积核和3
×
3卷积核,卷积之后会有激活函数激活,激活函数可以采用relu函数,汇聚函数可以使用最大汇聚,两种卷积核提取的特征经过激活函数和汇聚层之后进行合并,并和卷积层输入做残差运算,重复做三次卷积、合并及残差运算之后输入全连接层,经过三个全连接层和softmax函数后输出。当然模型的实现不限于以上卷积神经网络结构,可以采用循环神经网络结构(可以为rnn、gru、lstm)或注意力模型,或者基于以上算法模型中的多种组合,模型输出可以为剪切结束的概率或状态类别。
[0077]
模型的输入特征包括工作反馈参数,物理结构特征参数,环境参数的一种或多种组合。所述工作反馈参数包括但不限于实时电压u、实时电流i、实时谐振频率f、频率一阶导数df、功率p、阻抗r、电压电流相位差φ;所述物理结构特征参数包括但不限于超声刀杆材料、长度、形状;所述环境参数包括但不限于环境温度、环境湿度。
[0078]
输入特征越完备,神经网络模型的逼近能力越强。本发明模型中,实时电压u和实时电流i由发生器通过电流电压传感器实时采样得到,且电压电流传感器采样频率可以为实际信号频率的64倍或者128倍等;实时谐振频率f、频率一阶导数df、功率p、阻抗r、电压电流相位差φ等参数由采样值经过fft等数学运算得到:
[0079]
实时功率p和阻抗r可以由以下公式计算得到:
[0080]
p=u
×
i
ꢀꢀꢀ
(3)
[0081][0082]
电压电流相位差φ可以由以下公式计算得到:
[0083]
φ=φ
u
‑
φ
i
ꢀꢀꢀ
(5)
[0084]
其中,电压相位为φ
u
、电流相位为φ
i
;
[0085]
实时谐振频率f由以下公式计算得到:
[0086]
f=k
×
(φ
‑
φ0)
ꢀꢀꢀ
(6)
[0087]
其中,k由实时电压u和电流i的一个函数关系确定:
[0088]
k=k(u,i)
ꢀꢀꢀ
(7)
[0089]
电压相位φ
u
、电流相位φ
i
由发生器实时采样得到,φ0为一个常数。
[0090]
超声刀刀杆材料、长度、形状等物理结构特征参数,以及超声刀型号、待剪切的组织可以保存在超声刀或者发生器的存储芯片中,发生器直接读取相应的存储芯片可以得到这些特征参数;环境温度、环境湿度等环境参数可以通过传感器进行实时测量得到。
[0091]
本发明模型训练方法可以为监督学习、半监督学习、无监督学习和强化学习等方式。监督学习需要采集模型的所有输入特征信息以及训练标签,可以以一定的时间间隔采集,时间间隔可以为1ms或者10ms。
[0092]
模型监督学习实现的一种神经网络模型训练过程如图7所示,从训练数据集s中取输入特征,并输入神经网络模型计算每个神经元的中间值和梯度值,模型的损失函数可以为交叉熵、均方误差mse等损失函数,并利用梯度下降法进行权重更新,重复以上过程直到模型达到预定的停止条件,比如预测精度达到目标值或者损失不再减小,达到停止条件后停止训练并保存模型。
[0093]
模型中的训练标签可以使用每个采样时间点的状态类别或者结束概率:状态类别可以为采用二分类或者多分类,多分类可以将开始剪切阶段定为类别0,剪切分离阶段定为类别1,剪切结束阶段定为类别2;结束概率可以为沿着剪切时间的一个概率分布,可以为均匀分布或者正态分布等。
[0094]
训练好的模型由各个层和相应的神经元及权重构成,权重参数和应用算法程序保存在发生器内存中,内存可以为flash、eeprom或者其他非易失存储设备中,应用程序在处理器中运行,处理器可以为存在于发生器中的arm、dsp、fpga、cpu、gpu或者asic芯片,也可以为通过网络连接的远程服务器。
[0095]
本发明剪切结束判断模型的处理方法如图8所示。
[0096]
将实时超声刀特征参数集x输入模型,模型根据输入的特征集合可以得到实时的结束概率或者状态类别。
[0097]
本发明基于该剪切结束判断模型进行的控制方法,是根据神经网络预测结果进行超声刀输出控制,如图11所示,具体包括步骤:
[0098]
s1、保存剪切结束判断模型和至少一个阈值;
[0099]
s2、向所述剪切结束判断模型输入相应输入特征,输出实时的剪切结束概率值;
[0100]
s3、将所述剪切结束概率值与所述阈值进行比较;
[0101]
s4、根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出。当判断超声刀已经达到组织剪切结束点时,在该时间点降低超声刀控制电流并产生结束剪切提示。
[0102]
本发明中,所述阈值可以为根据不同剪切状态相对应的类别数值集,例如将开始剪切阶段定为类别0,剪切分离阶段定为类别1,剪切结束阶段定为类别2,步骤s2中的模型输出结果为所述类别数值集中的其中一个类别数值。例如当模型输出的数值为2时,则说明该时间已经达到剪切结束阶段,则降低超声刀控制电流并产生结束剪切提示。
[0103]
或者,本发明中,所述阈值也可以为一个位于0
‑
1内的小数值,例如可以设置为固定值0.9或0.95等,神经网络模型输出的概率值符合均匀分布或正态分布等概率分布,步骤s3中将神经网络模型输出的实时剪切结束概率值与该阈值进行比较,当实时剪切结束概率值大于该阈值则可以判定为剪切结束。
[0104]
鉴于此,实现的方式有很多,本发明的其中一种实现的方法如图9所示,预先设置
的第一结束概率阈值p1和第二结束概率阈值p2。当模型预测的结束概率值p低于阈值p1则按照第一控制算法k1控制输出,k1可以为保持恒定电流输出;当结束概率值p在阈值p1和p2之间则按第二控制算法k2控制输出,k2可以为保持恒定功率输出;当结束概率值p高于阈值p2则按照第三控制算法k3控制输出,k3可以为在100ms内将电流降低至原先的10%。
[0105]
本发明中输出控制算法可以包括机器学习算法。
[0106]
结束概率对应0~1以内的一个概率值,结束概率可以包含一个或多个概率阈值。输出控制算法k可以通过调整输出电压或电流来实现输出功率调整,功率调整方向可能为增大、减小或者保持不变,调整时间间隔和调整幅度值可以为符合条件的任意值,也可以为其他自定义的任意功率调整方式。
[0107]
达到预定的结束条件除了调整输出功率,也可以通过声音提示来提醒医生结束手术剪切操作,另外一种实现的方法如图10所示,结束概率阈值p0可以为0~1之内的任意值,例如可以设置为0.95,当预测概率值高于0.95表示可以停止剪切操作。提示方法可以通过音频提示或者发生器显示屏图片文字提示等。
[0108]
本发明还揭示了一种基于剪切结束判断模型的控制系统,包括:
[0109]
存储单元,用于保存剪切结束判断模型和至少一个阈值;
[0110]
处理单元,用于向所述剪切结束判断模型输入相应输入特征,输出实时的剪切结束概率值;
[0111]
比较单元,用于将所述剪切结束概率值与所述阈值进行比较;
[0112]
调节单元,用于根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出。
[0113]
本发明还揭示了一种基于剪切结束判断模型进行控制的发生器,包括:
[0114]
控制电路,所述控制电路耦接到存储器,所述控制电路被配置为能够:
[0115]
保存剪切结束判断模型和至少一个阈值;
[0116]
向所述剪切结束判断模型输入相应输入特征,输出实时的剪切结束概率值;
[0117]
将所述剪切结束概率值与所述阈值进行比较;
[0118]
根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出。
[0119]
本发明还揭示了一种基于剪切结束判断模型的超声刀外科器械,包括:
[0120]
超声机电系统,所述超声机电系统包括经由超声波导联接到超声刀的超声换能器;以及
[0121]
发生器,所述发生器被配置为向所述超声换能器供应功率,其中所述发生器包括控制电路,所述控制电路被配置为能够:
[0122]
保存剪切结束判断模型和至少一个阈值;
[0123]
向所述剪切结束判断模型输入相应输入特征,输出实时的剪切结束概率值;
[0124]
将所述剪切结束概率值与所述阈值进行比较;
[0125]
根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出。
[0126]
本发明还揭示了一种基于剪切结束判断模型的超声刀系统,包括处理器和非易失存储设备,其中所述非易失存储设备包含应用程序,所述应用程序在由所述处理器执行时致使所述处理器:
[0127]
保存剪切结束判断模型和至少一个阈值;
[0128]
向所述剪切结束判断模型输入相应输入特征,输出实时的剪切结束概率值;
[0129]
将所述剪切结束概率值与所述阈值进行比较;
[0130]
根据比较结果,调节施加到超声刀换能器的功率水平以控制超声刀电流输出。
[0131]
以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。