技术特征:
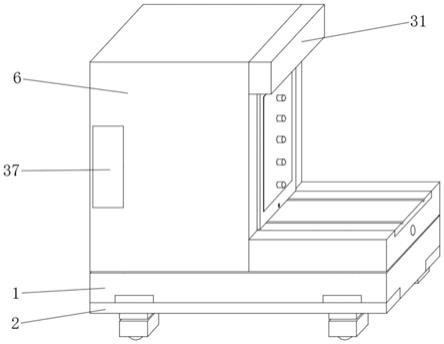
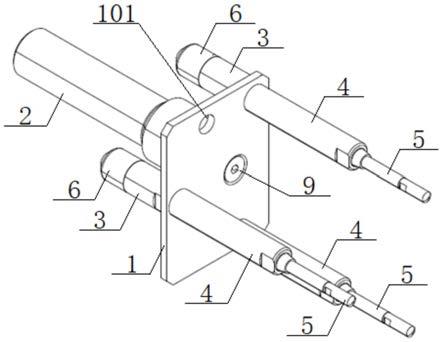
1.一种高强度冲击和自检式智能化生产机器人,包括底座(1),其特征在于:所述底座(1)底部竖直对称轴两端内壁连接有承重块(2),所述承重块(2)顶部两端均连接有控制电机(3),所述控制电机(3)顶部均连接有升降柱(4),所述承重块(2)底部两端均连接有滚轮(5),所述升降柱(4)顶部连接有机箱(6),所述机箱(6)内壁一侧中心处连接有控制电路板(7),所述控制电路板(7)顶部连接有数据线(8),所述控制电路板(7)底部连接有网状架(9),所述网状架(9)底部连接有散热槽(10),所述控制电路板(7)一侧外壁中心处连接有伸缩柱(11),所述伸缩柱(11)顶部连接有衔接转轴扣(12),所述机箱(6)内壁另一侧中心处连接有运动槽(13),所述运动槽(13)内壁一端连接有降噪垫(14),所述降噪垫(14)内壁中心处连接有第一通孔(15),所述运动槽(13)内壁一侧竖直对称轴两端均连接有第一减震弹簧柱(16),所述第一减震弹簧柱(16)顶部连接有海绵垫(17),所述降噪垫(14)内壁竖直对称轴两端均连接有第二通孔(18),所述衔接转轴扣(12)顶端外壁连接有防护块(19),所述防护块(19)内壁一侧竖直对称轴两端均连接有支撑块(20),所述支撑块(20)顶部均连接有第二减震弹簧柱(21),所述防护块(19)内壁一侧中心处连接有第一螺纹槽(22),所述防护块(19)内壁另一侧中心处连接有镶嵌槽(23),所述防护块(19)底部竖直对称轴两端内壁均连接有卡槽(24),所述卡槽(24)内壁均连接有滑轮块(25),所述防护块(19)内壁另一侧竖直对称轴两端均连接有第二螺纹槽(26),所述镶嵌槽(23)内壁连接有冲击块(27),所述冲击块(27)内壁连接有减震块(28),所述冲击块(27)一侧外壁竖直对称轴处均连接有数个冲击柱(29),所述数据线(8)顶部一端连接有噪音检测器(30),所述机箱(6)一侧外壁顶端连接有衔接块(31),所述衔接块(31)底部中心处内壁连接有紫外线检测射线(32),所述冲击块(27)内壁一侧竖直对称轴两端均连接有限位槽(33),所述防护块(19)另一侧外壁连接有固定框(34),所述固定框(34)顶部和底部横向对称轴内壁均连接有第三螺纹槽(35),所述第三螺纹槽(35)内壁连接有固定螺栓(36),所述控制电路板(7)另一侧外壁连接有控制显示器(37),所述运动槽(13)内壁底部连接有工作垫块(38),所述工作垫块(38)顶部竖直对称轴两端内壁连接有滑轨(39),所述机箱(6)内壁另一侧底端中心处连接有固定螺孔(40)。2.根据权利要求1所述的一种高强度冲击和自检式智能化生产机器人,其特征在于:所述底座(1)底部竖直对称轴两端内壁均与承重块(2)外壁镶嵌焊接,所述承重块(2)顶部两端均与控制电机(3)底部焊接,所述控制电机(3)顶部均与升降柱(4)底部焊接,所述承重块(2)底部两端均与滚轮(5)顶部焊接,所述升降柱(4)顶部与机箱(6)底部焊接。3.根据权利要求1所述的一种高强度冲击和自检式智能化生产机器人,其特征在于:所述机箱(6)内壁一侧中心处与控制电路板(7)外壁镶嵌焊接,所述控制电路板(7)顶部与数据线(8)底部焊接,所述控制电路板(7)底部与网状架(9)顶部焊接,所述网状架(9)底部与散热槽(10)顶部焊接,所述网状架(9)和散热槽(10)外壁均镶嵌焊接于机箱(6)内壁一侧底端中心处。4.根据权利要求1所述的一种高强度冲击和自检式智能化生产机器人,其特征在于:所述控制电路板(7)一侧外壁中心处与伸缩柱(11)底部焊接,所述控制电路板(7)另一侧外壁与控制显示器(37)底部焊接,所述伸缩柱(11)顶部与衔接转轴扣(12)底部焊接,所述防护块(19)内壁一侧中心处开设有第一螺纹槽(22),所述衔接转轴扣(12)顶端外壁与第一螺纹槽(22)内壁螺纹连接。5.根据权利要求1所述的一种高强度冲击和自检式智能化生产机器人,其特征在于:所
述机箱(6)内壁另一侧中心处开设有运动槽(13),所述运动槽(13)内壁一端与降噪垫(14)底部粘接,所述降噪垫(14)由隔音毡复合材料制成,所述降噪垫(14)内壁中心处开设有第一通孔(15),所述伸缩柱(11)顶端外壁活动套接于第一通孔(15)内壁,所述运动槽(13)内壁一侧竖直对称轴两端均与第一减震弹簧柱(16)底端外壁镶嵌焊接,所述第一减震弹簧柱(16)顶部与海绵垫(17)底部粘接。6.根据权利要求1所述的一种高强度冲击和自检式智能化生产机器人,其特征在于:所述降噪垫(14)内壁竖直对称轴两端均开设有第二通孔(18),所述第一减震弹簧柱(16)顶端外壁活动套接于第二通孔(18)内壁,所述防护块(19)外壁活动套接于运动槽(13)内壁,所述防护块(19)内壁另一侧中心处开设有镶嵌槽(23),所述防护块(19)底部竖直对称轴两端内壁开设有卡槽(24),所述卡槽(24)内壁与滑轮块(25)顶端外壁卡接,所述防护块(19)内壁另一侧竖直对称轴两端均开设有第二螺纹槽(26)。7.根据权利要求1所述的一种高强度冲击和自检式智能化生产机器人,其特征在于:所述镶嵌槽(23)内壁与冲击块(27)外壁卡接,所述减震块(28)外壁镶嵌套接于冲击块(27)内壁,所述减震块(28)由聚氨酯复合材料制成,所述冲击柱(29)共设有五个,所述冲击块(27)一侧外壁竖直对称轴处均与冲击柱(29)底部焊接,所述机箱(6)一侧外壁顶端与衔接块(31)外壁一端焊接,所述衔接块(31)底部中心处内壁与紫外线检测射线(32)外壁卡接。8.根据权利要求1所述的一种高强度冲击和自检式智能化生产机器人,其特征在于:所述运动槽(13)内壁顶部中心处与噪音检测器(30)外壁卡接,所述数据线(8)顶部一端与噪音检测器(30)顶部中心处焊接,所述数据线(8)顶部另一端与紫外线检测射线(32)顶部中心处焊接,所述防护块(19)内壁一侧竖直对称轴两端均与支撑块(20)外壁镶嵌焊接,所述支撑块(20)顶部均与第二减震弹簧柱(21)底部焊接,所述冲击块(27)内壁一侧竖直对称轴两端均开设有限位槽(33),所述第二减震弹簧柱(21)顶端外壁套接于限位槽(33)内壁。9.根据权利要求1所述的一种高强度冲击和自检式智能化生产机器人,其特征在于:所述防护块(19)另一侧外壁与固定框(34)内壁一侧套接,所述固定框(34)顶部和底部横向对称轴内壁均开设有第三螺纹槽(35),所述固定螺栓(36)外壁均同时与第三螺纹槽(35)和第二螺纹槽(26)内壁螺纹连接,所述运动槽(13)内壁底部与工作垫块(38)底部一端焊接,所述工作垫块(38)顶部竖直对称轴两端内壁均与滑轨(39)外壁镶嵌焊接,所述滑轮块(25)底部外壁与滑轨(39)内壁滑动连接,所述机箱(6)内壁另一侧底端中心处开设有固定螺孔(40)。
技术总结
本发明涉及生产加工设备技术领域,尤其涉及一种高强度冲击和自检式智能化生产机器人,包括底座,底座底部竖直对称轴两端内壁连接有承重块,承重块顶部两端均连接有控制电机,控制电机顶部均连接有升降柱,承重块底部两端均连接有滚轮,本发明中通过设置控制显示器,可以将机器人自检结果,从显示器中清晰的反馈给劳动者,不仅节约了逐步排查所浪费的时间,同时还降低了劳动维修成本,通过设置衔接转轴扣与防护块简易的连接结构,有利于进一步提高整个机器人便于组装拆卸的工作效率,通过设置紫外线检测射线和噪音检测器,可以为机器人自检提供一定基础,从而提高机器人智能化效果。从而提高机器人智能化效果。从而提高机器人智能化效果。
技术研发人员:王明春 陈天池 叶磊
受保护的技术使用者:苏州明池精密科技有限公司
技术研发日:2021.08.19
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。