1.本发明涉及无创连续血压监测领域,具体地涉及快速精准确定容积补偿法伺服参考值的系统及方法。
背景技术:
2.血压是最基本的生命体征参数之一,也是临床最基本的监测要素。在不同的血管内部,常见的血压有毛细血管血压、静脉血压和动脉血压。人体血压的精确测量,有助于高血压疾病早期的筛选、识别,在心血管疾病防治方面具有十分重要的意义。在紧急手术实施过程中,病人生理情况极易变化,医生及时清楚了解病人血压变化的情况对于手术的成功实施十分重要。
3.以往,临床上血压监测主要有两种:一种是传统无创袖带间隔式血压监测(noninvasive blood pressure,nbp),另一种是有创动脉血压穿刺监测(invasive blood pressure,ibp)。前者因为无法做到连续每搏监测,因此对于病情变化剧烈的病人,会产生监测“盲区”;后者由于要动脉血管穿刺,可能会造成一系列的并发症。尽管常规方法在医院就诊/检查时或在家中单次血压测量在某种程度上可以满足要求,但在手术,icu,透析等情况中仍需要连续监测血压。然而,常规的非侵入式血压测量方法只能以间隔时间间歇地重复进行血压测量,难以测量血压的突然波动。另外,血压随着心跳而波动,并且该波动具有医学意义,但是该波动不能通过常规的无创血压测量方法来监测。
4.基于容积补偿法的无创连续血压监测系统能够连续进行血压的跟踪,了解血压的动态变化,采用这种方法可以有效地实现连续血压测量。这种方法的核心点是在随动系统中给出准确的伺服参考值(v0),以便血管臂的容积能够始终保持不变,此时透臂压保持在零值。传统上,v0是通过阶梯法加压或匀速加(减)压法的体积振动法确定的,需要袖带压的加压速度足够低以便准确地捕获v0,并且通常花费30秒以上。但是,阶梯法升压及不够低的加压速度会导致获取的伺服参考值分辨率不够,从而影响闭环血压监测的准确性。
5.基于此,本发明设计了快速精准确定容积补偿法伺服参考值的系统及方法,以解决上述问题。
技术实现要素:
6.本发明的目的在于提供快速精准确定容积补偿法伺服参考值的系统及方法,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:
8.一种快速精准确定容积补偿法伺服参考值的系统,其特征在于:包括气源系统、控制系统、mcu控制单元。
9.所述气源系统包括气泵;
10.储气罐;所述储气罐与气泵连通;
11.压力传感器一和安全阀;所述的压力传感器一和安全阀与储气罐通过输出管路连
通。
12.所述气源系统用于输出恒定压力值气源并通过安全阀在气源系统异常时打开;
13.所述控制系统包括指套系统;所述指套系统用于检测血压;
14.比例阀一;所述比例阀一与储气罐连通;
15.比例阀二和压力传感器二;所述比例阀二、压力传感器二和比例阀一连接在指套系统输入管路上;
16.采集信号模块;所述光电信号采集模块连接在指套系统输出端,且与指套系统和mcu控制单元电性连接。
17.所述控制系统用于调节指套系统压力和维持指套系统压力恒定。
18.所述mcu控制单元电性连接有电源;且mcu控制单元与比例阀一、比例阀二、压力传感器一、压力传感器二均电性连接。
19.优选的,所述压力传感器一用于检测气源系统输出端气压值,所述安全阀为常闭阀,作用是当气源系统中的压力异常时打开,所述恒定压力值可依据于指套系统中的平均压力分级调整。
20.优选的,所述比例阀一和比例阀二用于调节指套系统输入压力,所述压力传感器二用于检测指套系统输入气压值。
21.优选的,所述指套系统由光源、光电接收器及气囊组成,所述光电接收器与光电信号采集模块电连接,所述气囊用于套在患者手指上检测血压,将气囊下手指动脉的血容量值作为伺服参考值v0。
22.优选的,所述光电信号采集模块可以由电流电压转换电路、信号调理电路及ad转换芯片组成,也可以为模拟前端芯片构成的电路组成。
23.快速精准确定容积补偿法伺服参考值的方法,该方法具体为基于三分法伺服参考值的快速精准查找方法或具有自调整步进梯度的伺服参考值快速精准查找方法;
24.所述基于三分法伺服参考值的快速精准查找方法依据气囊中不同压力与其基于动脉的容量产生的ppg信号幅值强度的函数关系,进行容积补偿法伺服参考值的快速精准查找;
25.所述具有自调整步进梯度的伺服参考值快速精准查找方法是根据查找值与目标值的关系自动调整步进斜率值,将步进梯度应用于伺服参考值的查找。
26.优选的,所述基于三分法伺服参考值的快速精准查找方法,应用于上述系统,具体步骤如下:
27.s400:将手指放置于指套系统中,对气囊进行预充气;首先启动气泵,关闭比例阀一与比例阀二,当气源系统中的压力达到预充压力时,关闭气泵,打开比例阀一,使得气源系统中的高压气体导入气囊中;
28.s401:获取当前指套气囊内的压力p_0,气源系统及指套系统内执行闭环pid压力控制;气泵与比例阀一之间压力开启闭环pid控制使得其内部压力恒定为定值如300mmhg;指套系统根据比例阀一及比例阀二执行闭环pid压力控制,将压力调整为获取的气囊初始压力p_0;
29.s402:设定查找的压力的初始区间范围是[p_l,p_r],如[50mmhg,200mmhg];
[0030]
s403:取压力区间[p_l,p_r]的中点p_mid,获取当前压力下的ppg信号的交流幅值
vpp_mid;将指套系统内的压力调节为p_mid,mcu控制单元通过光电信号采集模块获取此压力下1.3s的ppg信号v_mid(t),通过计算得到;
[0031]
s404:取中点p_mmid,获取当前压力下的ppg信号的交流幅值vpp_mmid;
[0032]
s405:比较vpp_mid与vpp_mmid的大小,确定下一区间范围;当vpp_mid>vpp_mmid时,伺服参考值v0对应的压力pc在p_mmid的左边,将p_r=p_mmid缩小区间范围;当vpp_mid<vpp_mmid时,伺服参考值v0对应的压力pc在p_mid的右边,将p_l=p_mid缩小区间范围;
[0033]
s4051:右侧压力区间调整为p_r=p_mmid;
[0034]
s4052:左侧压力区间调整为p_l=p_mid;
[0035]
s406:更新当前压力区间范围为[p_l,p_r];
[0036]
s407:当前压力区间差值阈值判断,当p_r
‑
p_l<1mmhg时,当前v0查找的分辨率到达,查找结束,将在压力p_l与p_r下ppg信号交流分量幅值中最大的一侧区间压力所对应的ppg信号直流分量点作为控制的伺服参考值v0;否则返回s403;
[0037]
s408:查找结束,确定当前伺服参考值v0;
[0038]
s409:返回步骤s403。
[0039]
优选的,所述具有自调整步进梯度的伺服参考值快速精准查找方法,应用于上述系统,具体步骤如下:
[0040]
s600:将手指放置于指套系统中,对气囊进行预充气;首先将启动气泵,关闭比例阀一与比例阀二,当气源系统中的压力达到预充压力如150mmhg时,关闭气泵,打开比例阀一,使得气源系统中的高压气体导入气囊中;
[0041]
s601:将当前气囊内的压力调节为经验值p_mid,如100mmhg,气源系统及指套系统内执行闭环pid压力控制;
[0042]
s602:设定查找的压力的初始区间范围是[p_l,p_r],如[50mmhg,200mmhg];
[0043]
s603:获取当前压力p_mid下1500个采样点,根据采样点计算当前心率pulse_rate_mid、ppg信号幅值vpp_mid、伺服参考值v_mid及比例值per_mid;
[0044]
根据per_mid值确定区间范围:
[0045]
当per_mid<50%时,压力区间50
‑
100mmhg;
[0046]
当per_mid>50%时,压力区间100
‑
200mmhg;
[0047]
s604:根据步骤s603得到的per_mid值确定区间范围,同时根据心率pulse_rate_mid的值确定后续缓存数组的大小,初始步进斜率k设置为经验值最大值0.011;
[0048]
心率pulse_rate_mid的值确定后续缓存数组的大小,确保缓存的数组中可以得到至少一个完整周期的ppg信号:
[0049]
心率45
‑
60:2.8s数据;
[0050]
心率60
‑
80:2.2s数据;
[0051]
心率80
‑
100:1.8s数据;
[0052]
心率100
‑
200:1.4s数据;
[0053]
s605:判断|per_mid
‑
0.5|<0.01是否成立;
[0054]
若成立,执行s606;所述s606具体为:伺服参考值查找完成,即查找完成标志位find_v0_flag=1;v0=v_mid,pc=p_mid;
[0055]
若不成立,执行s607;所述s607具体为:判断查找完成标志位find_v0_flag=1是
否成立;
[0056]
若成立,执行s613;所述s613具体为:查找完成标志位find_v0_flag=1、v0=v_mid、pc=p_mid;
[0057]
若不成立,执行下一步骤s608;
[0058]
s608:更新下一个查找压力点p_mid,并根据计算的压力点判断使得否需要更新步进斜率k值,最终确定p_mid;
[0059]
s609:将压力调整为p_mid,根据步骤s604得到的缓存数组大小,获取此压力下的ppg信号,并计算相关波形参数,获取的相关波形参数为ppg信号幅值vpp_mid、伺服参考值v_mid及比例值per_mid;
[0060]
s610:判断|per_mid
‑
0.5|<0.01是否成立;
[0061]
若成立,伺服参考值查找完成,执行步骤s613;
[0062]
若不成立,执行s611;
[0063]
s611:根据per_mid的值更新边界范围[p_l,p_r]:
[0064]
当per_mid>0.5时,p_l=per_mid;
[0065]
当per_mid<0.5时,p_r=per_mid,随后执行;
[0066]
s612:执行步骤s607;
[0067]
与现有技术相比,本发明的有益效果是:
[0068]
1、本发明提出的基于恒定容积法的无创连续血压监测系统,该系统为双气路系统,即后端的气源系统及前端的指套系统,一方面解决了传统结构中气泵与比例阀响应时间不一致导致控制效果差的问题;另一方面,气源系统为后端指套系统持续提供稳定可靠的压力气源,提高了指套系统的闭环控制收敛速度。
[0069]
2、本发明的基于三分法的伺服参考值v0快速精准查找方法将从ppg信号随不同压力下直流分量的峰值呈现单峰值近似二次函数的关系出发,使用三分查找算法,大大减小了查找时间,同时也相较于传统阶梯法及恒定加(减)压法更加精准,且与后续闭环跟随无缝衔接。
[0070]
3、本发明的具有自调整步进梯度的伺服参考值v0快速精准查找方法,依据ppg信号的波形轮廓特征,同时加入自调整步进斜率,使得伺服参考值v0查找收敛更加快速精准,也为闭环控制中为伺服参考值v0的更新提供了新方法。
附图说明
[0071]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0072]
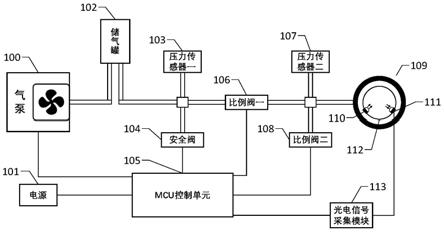
图1为本发明无创连续血压监测系统框图;
[0073]
图2为本发明同恒定压力下测得的光电容积脉搏波(ppg)信号v(t)的信号波形图;
[0074]
图3为本发明ppg信号v(t)的交流信号幅值vpp随压力变换的函数关系波形图;
[0075]
图4为本发明基于三分法伺服参考值v0的快速精准查找方法流程示意图;
[0076]
图5为本发明指套压力p、ppg信号交流分量幅值vpp及值的函数波形关系图;
[0077]
图6为本发明具有自调整步进梯度的伺服参考值v0快速精准查找方法流程示意图。
[0078]
附图中,各标号所代表的部件列表如下:
[0079]
100
‑
气泵,101
‑
电源,102
‑
储气罐,103
‑
压力传感器一,104
‑
安全阀,105
‑
mcu控制单元,106
‑
比例阀一,107
‑
压力传感器二,108
‑
比例阀二,109
‑
指套系统,110
‑
光源,112
‑
气囊,111
‑
光电接收器,113
‑
光电信号采集模块。
具体实施方式
[0080]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0081]
请参阅图1
‑
6,本发明提供一种技术方案:
[0082]
快速精准确定容积补偿法伺服参考值的系统,包括气源系统,、控制系统、mcu控制单元;
[0083]
所述气源系统包括气泵100;储气罐102;所述储气罐102与气泵100连通;压力传感器一103和安全阀104;所述的压力传感器一103和安全阀104与储气罐102通过输出管路连通。所述气源系统用于输出恒定压力值气源并通过安全阀104在气源系统异常时打开。
[0084]
所述控制系统包括指套系统109;所述指套系统用于检测血压;比例阀一106;所述比例阀一106与储气罐102连通;比例阀二108和压力传感器二107:所述比例阀二108、压力传感器二107和比例阀一106连接在指套系统109输入管路上;采集信号模块113;所述光电信号采集模块113连接在指套系统109输出端,且与指套系统109和mcu控制单元105电性连接。所述控制系统用于调节指套系统压力和维持指套系统压力恒定。
[0085]
所述mcu控制单元105电性连接有电源101;且mcu控制单元105与比例阀一106、比例阀二108、压力传感器一103、压力传感器二107均电性连接。
[0086]
其中,气泵100、储气罐102、压力传感器一103及安全阀104组成气源系统,主要作用是在系统运行过程中使得比例阀一106的入口压力值为一恒定值(例如300mmhg)。该恒定值依据于指套气囊中的平均压力分级调整,同时为维持比例阀一106入口处压力为一恒定值,气泵100及压力传感器一103组成一闭环控制系统。
[0087]
安全阀104为常闭阀,其作用是当气源系统中的压力异常时,即压力值持续高于某一阈值压力特定时间时,安全阀104打开,保护整个气路系统安全。
[0088]
比例阀一106、压力传感器二107、比例阀二108、指套系统109及光电信号采集模块113组成另一闭环控制系统,一方面开环伺服参考值查找阶段维持指套内压力恒定,另一方面在闭环过程中不断调节指套内的压力,使指套下手指动脉的血容量值为伺服参考值v0恒定不变,可以将指套内的压力值视为血压。
[0089]
指套系统109由光源110、光电接收器111及气囊112组成。光电信号采集模块113可以由电流电压转换电路、信号调理电路及ad转换芯片组成,也可以为afe4490、afe4900等模拟前端芯片构成的电路组成。
[0090]
该系统为双气路系统,即后端气源系统和前端指套系统,一方面解决了传统结构
中气泵与比例阀响应时间不一致导致控制效果差的问题;另一方面,气源系统为指套系统持续提供稳定可靠的压力气源,提高了指套系统的闭环控制收敛速度。
[0091]
本发明基于快速精准确定容积补偿法伺服参考值的系统还提供快速精准确定容积补偿法伺服参考值的方法,该方法具体为基于三分法伺服参考值的快速精准查找方法或具有自调整步进梯度的伺服参考值快速精准查找方法;
[0092]
实施例1:基于三分法伺服参考值的快速精准查找方法。
[0093]
将指套系统109放置于人体手指的动脉处,根据指套气囊112中不同压力与其基于动脉的容量产生的ppg信号幅值强度的函数关系,进行快速精准查找容积补偿法伺服参考值v0。
[0094]
请参阅图2,该图示出了指套系统109中气囊112内的不同恒定压力下测得的光电容积脉搏波(ppg)信号v(t)的信号波形,在压力恒定增加的过程中,ppg信号的交流波形信号的幅值在伺服参考值v0或平均压pc下,ppg信号v(t)的交流信号幅值最大,在其两端幅值逐渐减小。
[0095]
再参阅图3,该图示出了ppg信号v(t)的交流信号幅值vpp随压力变换的函数关系波形,vpp的值随压力变换呈现单峰值的二次函数关系;根据这一特征,基于三分法伺服参考值的快速精准查找方法具体步骤如下:
[0096]
s400:将手指放置于指套系统109中,对气囊112进行预充气。首先将启动气泵100,关闭比例阀一106与比例阀二107,当气源系统中的压力达到预充压力如150mmhg时,关闭气泵100,打开比例阀106一,使得气源系统中的高压气体导入指套气囊112中;
[0097]
s401:获取当前指套气囊112内的压力p_0,气源系统及指套系统内执行闭环pid压力控制;气源系统压力开启闭环pid控制使得气源系统内压力恒定为定值如300mmhg;指套系统109根据比例阀一106及比例阀二107执行闭环pid压力控制,将压力调整为获取的气囊初始压力p_0;
[0098]
s402:设定查找的压力的初始区间范围是[p_l,p_r],如[50mmhg,200mmhg];
[0099]
s403:取压力区间[p_l,p_r]的中点p_mid,获取当前压力下的ppg信号的交流幅值vpp_mid。将指套系统109的压力调节为p_mid,mcu控制单元105通过光电信号采集模块113获取此压力下1.3s的ppg信号v_mid(t),通过以下公式计算交流幅值vpp_mid:
[0100]
vpp
mid
;
[0101]
s404:取压力区间[p_mid,p_r]的中点p_mmid,获取当前压力下的ppg信号的交流幅值vpp_mmid;将指套内的压力调节为p_mmid,mcu控制单元通过光电信号采集模块获取此压力下1.3s的ppg信号v_mmid(t),通过s403中的公式(1)计算交流幅值vpp_mmid;
[0102]
s405:比较vpp_mid与vpp_mmid的大小,确定下一区间范围:当vpp_mid>vpp_mmid时,伺服参考值v0对应的压力pc在p_mmid的左边,将p_r=p_mmid缩小区间范围;当vpp_mid<vpp_mmid时,伺服参考值v0对应的压力pc在p_mid的右边,将p_l=p_mid缩小区间范围;
[0103]
s4051:右侧压力区间调整为p_r=p_mmid;
[0104]
s4052:左侧压力区间调整为p_l=p_mid;
[0105]
s406:更新当前压力区间范围为[p_l,p_r];
[0106]
s407:当前压力区间差值阈值判断。当p_r
‑
p_l<1mmhg时,当前v0查找的分辨率到达,查找结束,将在压力p_l与p_r下ppg信号交流分量幅值中最大的一侧区间压力所对应的
ppg信号直流分量点作为控制的伺服参考值v0;否则返回步骤s403;
[0107]
s408:查找结束,确定当前伺服参考值v0;
[0108]
s409:返回步骤s403。
[0109]
综上,基于三分法伺服参考值的快速精准查找方法是依据气囊112中不同压力与其基于动脉的容量产生的ppg信号幅值强度的函数关系,进行容积补偿法伺服参考值的快速精准查找;
[0110]
实施例2:具有自调整步进梯度的伺服参考值快速精准查找方法。
[0111]
指套气囊中的ppg信号的轮廓及ppg信号幅值强度随着压力的升高发生改变,由图2可知,ppg信号的轮廓由“胖”到“瘦”,这里使用per值指示ppg信号交流分量的“胖瘦”程度。per值由以下公式确定:
[0112][0113]
其中n是为一完整ppg信号去除基线的v
ac
(i)采样点的数量。v
ac
_max和v
ac
_min分别为v
ac
(i)信号的波峰及波谷值。
[0114]
再参阅图5,该图示出了指套压力p、ppg信号交流分量幅值vpp及值的函数波形关系图;per值与压力的关系呈现“倒s”形状,图5中在伺服参考压力值pc处,其对应的ppg信号交流分量幅值vpp也最大,同时per值为0.5,此时指动脉内的血管壁处于无负荷状态,同时也说明这种状态下血流量的平衡。在pc的左侧,per值大于0.5;在pc的右侧per值小于0.5;同时在pc的两侧一段区间内,per的值与指套内压力p呈现线性变化的趋势。通过大量实验表明,其斜率在0.0065
‑
0.011之间,依据这种关系,将步进梯度应用于伺服参考值v0查找中,且根据查找值与目标值的关系自动调整步进斜率k值。
[0115]
由上可得到具有自调整步进梯度的伺服参考值快速精准查找方法,该方法的具体步骤如下:
[0116]
s600:将手指放置于指套系统109中,对气囊112进行预充气:首先将启动气泵100,关闭比例阀一106与比例阀二107,当气源系统中的压力达到预充压力如150mmhg时,关闭气泵100,打开比例阀一106,使得气源系统中的高压气体导入指套气囊112中;
[0117]
s601:将当前指套气囊112内的压力调节为经验值p_mid,如100mmhg,气源系统及指套系统内执行闭环pid压力控制。气源系统压力开启闭环pid控制使得气源系统内压力恒定为定值如300mmhg。指套系统根据比例阀一106及比例阀二107执行闭环pid压力控制,将压力调整为p_mid;
[0118]
s602:设定查找的压力的初始区间范围是[p_l,p_r],如[50mmhg,200mmhg];
[0119]
s603:获取当前压力p_mid下1500个采样点,根据采样点计算当前心率pulse_rate_mid、ppg信号幅值vpp_mid、伺服参考值v_mid及比例值per_mid。
[0120]
上述参数的计算如下:
[0121]
取ppg信号的采样率为500hz,获取的1500个数据为3s的信号数据,放在缓冲数组ppg_buffer中,将获取的数据通过差分阈值法监测所有的波谷值,通过前两个波谷值,截取一段完整的ppg信号ppg_one(i),其信号长度为n。当前心率为:
[0122]
pulse_rate_mid=30000/n
ꢀꢀꢀ
(3)
[0123]
获取当前完整ppg信号的基线斜率k_ppg为:
[0124]
k_ppg=(ppg_one[n
‑
1]
‑
ppg_one[0])/n
ꢀꢀꢀ
(4)
[0125]
通过信号的基线斜率k_ppg将信号ppg_one(i)去除基线得到去除基线的信号ppg_zero(i),其信号长度为n。
[0126]
信号的幅值vpp_mid即为ppg_zero(i)的最大值,即:
[0127]
vpp_mid=max(ppg_zero(i))
ꢀꢀꢀ
(5.1)
[0128]
比例值per_mid可由公式(2)确定。
[0129]
当前伺服参考值v_mid为:
[0130][0131]
根据per_mid值确定区间范围:
[0132]
当per_mid<50%时,压力区间50
‑
100mmhg;
[0133]
当per_mid>50%时,压力区间100
‑
200mmhg。
[0134]
s604:根据步骤s603得到的per_mid值确定区间范围,同时根据心率pulse_rate_mid的值确定后续缓存数组的大小。初始步进斜率k设置为经验值最大值0.011。
[0135]
心率pulse_rate_mid的值确定后续缓存数组的大小,确保缓存的数组中可以得到至少一个完整周期的ppg信号:
[0136]
心率45
‑
60:2.8s数据;
[0137]
心率60
‑
80:2.2s数据;
[0138]
心率80
‑
100:1.8s数据;
[0139]
心率100
‑
200:1.4s数据;
[0140]
s605:判断|per_mid
‑
0.5|<0.01是否成立:
[0141]
若成立,执行s606;所述s606具体为:伺服参考值查找完成,即查找完成标志位find_v0_flag=1;v0=v_mid,pc=p_mid;
[0142]
若不成立,执行s607;
[0143]
s607:判断查找完成标志位find_v0_flag=1是否成立:
[0144]
若成立,执行s613,查找结束;
[0145]
若不成立,执行s608;
[0146]
s608:查找未完成时,更新下一个查找压力点p_mid,并根据计算的压力点判断使得否需要更新步进斜率k值,最终确定p_mid。
[0147]
确定最终p_mid的方法为:
[0148]
首先将p_new=p_mid通过如下公式计算:
[0149]
p_mid=((per_new
–
0.5)/k1) p_new
ꢀꢀꢀ
(6)
[0150]
判断更新的压力值p_mid是否超过当前查找的压力边界[p_l,p_r]之外:
[0151]
①
若在边界之外,更新步进斜率k值:
[0152]
k=(per_l
‑
per_r)/(p_l
‑
p_r)
ꢀꢀꢀ
(7)
[0153]
其中per_l与per_r分别是压力边界p_l,p_r所对应的per比例值。根据更新的k值,根据公式(6)更新下一个查找压力点p_mid。执行s609;
[0154]
②
若在边界之内,直接执行s609;
[0155]
s609:得到s608中的p_mid后,将压力调整为p_mid,根据步骤s604得到的缓存数组大小,获取此压力下的ppg信号,并根据s603的计算方法采样点计算相关波形参数,获取的相关波形参数为:ppg信号幅值vpp_mid、伺服参考值v_mid及比例值per_mid;
[0156]
s610:获取s609中的比例值per_mid,判断|per_mid
‑
0.5|<0.01是否成立:
[0157]
若成立,伺服参考值查找完成,执行s613,查找结束;
[0158]
若不成立,执行s611;所述s611具体为:s611:根据per_mid的值更新边界范围[p_l,p_r]:
[0159]
①
当per_mid>0.5时,p_l=per_mid;
[0160]
②
当per_mid<0.5时,p_r=per_mid,随后执行;
[0161]
s612:执行s607。
[0162]
s613:查找结束,即find_v0_flag=1;v0=v_mid,pc=p_mid。
[0163]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0164]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。