技术特征:
1.一种基于rtk技术的推土机路径规划系统,其特征在于,包括gnss基准站、gnss移动站、传感器、图像采集装置、控制器、比例阀组及人机交互界面;所述的gnss基准站安装在施工场地附近,gnss移动站安装在推土机上并实时接收gnss基准站发射的差分信号;所述的imu传感器、图像采集装置安装在推土机上与控制器相连;imu传感器与gnss移动站用于导航定位及路径追踪;图像采集装置安装在推土机前侧用于障碍物检测,并与控制器相连;所述的控制器通过比例阀组控制推土机行走机构,人机交互界面通过网络传输系统发送控制指令实现远程控制。2.如权利要求1所述的基于rtk技术的推土机路径规划系统,其特征在于,所述的图像采集装置为双目相机。3.如权利要求1所述的基于rtk技术的推土机路径规划系统,其特征在于,所述的传感器采用imu传感器。4.如权利要求1所述的基于rtk技术的推土机路径规划系统,其特征在于,所述推土机路径规划系统有两种作业模式,包括分层推平作业模式和全局整平作业模式。5.利用权利要求1
‑
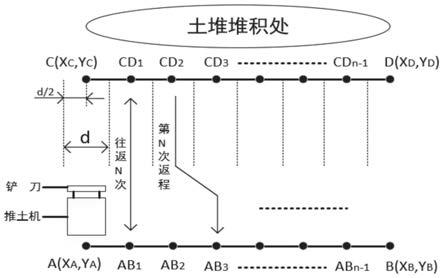
3任一所述的基于rtk技术的推土机路径规划系统进行作业的方法,其特征在于:先进行分层推平作业,然后进行全局推平作业;其中分层推平作业包括以下步骤:(1)根据实际工况将整个施工场地分为几块矩形区域,通过施工图纸获得每个矩形区域四个角点a、b、c、d的二维坐标值,求得ab与cd的距离;(2)求取ab距离中包括的铲刀宽度个数n,则表示ab路线上有n
‑
1个路径点,分别为ab1、ab2、ab3…
ab
n
‑1,同理可求得cd路线上的n
‑
1个路径点为cd1、cd2、cd3…
cd
n
‑1;(3)计算铲刀每层的切土深度h;(4)根据施工场地中施工表面与设计表面的差值h,计算得出推土机需要行进的次数n;(5)求出ab1、ab2、ab3…
ab
n
‑1及cd1、cd2、cd3…
cd
n
‑1路径点的二维坐标;(6)推土机由a点到c点行进往返n
‑
1次,每一次推土机铲刀由施工表面高度下降一个切土深度h,第n次时铲刀下降到设计表面行进到c点,返程时由c点退回到ab1点,再由ab1点到cd1点往返n次,第n次返程时回到ab2点,以此类推,一直反复行进到b点,由b点到d点行进n次结束该区域的推平作业,之后继续进行其它分区的作业。6.如权利要求5所述的作业方法,其特征在于:每进行完一个分区的推平作业,土堆会堆积在cd一侧,这时需要装载车将土堆装车运走。7.如权利要求5所述的作业方法,其特征在于:所述全局推平作业的方法如下:推土机按照a、c、cd1、ab1、ab2、cd2、cd3、ab3…
ab
n
‑1、cd
n
‑1、d、b的s型曲线进行作业。8.如权利要求5所述的作业方法,其特征在于:所述图像采集装置首先对施工现场的障碍物目标进行分析;通过深度学习对这几类目标进行模型训练并通过双目相机实时反馈这几类目标的深度信息,当障碍物与推土机的距离超过设定值时,行走机构驱动停止,等待障碍物经过后再继续作业,提高施工场地的安全性。9.如权利要求5所述的作业方法,其特征在于:工业rtu安装在推土机上与车载控制器连接,人机交互界面通过云平台及5g网络发送控制指令给工业rtu,进而实现远程控制。
技术总结
本发明专利公开了一种基于RTK技术的推土机路径规划系统及作业方法,该系统包括GNSS基准站、GNSS移动站、IMU传感器、双目相机、控制器、比例阀组及人机交互界面。该方法及系统应用在无人驾驶推土机的整平作业中,所有传感器与控制器进行数据通讯,控制器通过比例阀控制液压马达工作进而实现行走机构的自动化,GNSS移动站安装在推土机上并实时接收基站发射的信号进行差分定位,采用纯跟踪算法使推土机按照规划好的路径点和路径移动,IMU传感器用于路径跟踪过程中的方向纠偏,人机交互界面通过网络传输系统发送控制指令实现远程控制,双目相机用于实时检测障碍物目标的深度信息,提高系统的安全性与稳定性。系统的安全性与稳定性。系统的安全性与稳定性。
技术研发人员:黄亚军 胡滨 董全成 李明春 张如伟 田从丰 曹树坤 孙选 马长春
受保护的技术使用者:济南大学
技术研发日:2021.08.30
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。