1.本发明涉及工业机器人技术领域,尤其是涉及一种基于机器视觉的四轴并联机器人分拣系统。
背景技术:
2.目前,机器人分拣系统是先进配送和生产制造所必须的设备条件之一,它可以代替人工进行货物的分类、搬运和装卸工作。
3.相关技术中设计有申请公布号为cn105690393a的中国专利提供了一种基于机器视觉的四轴并联机器人分拣系统及其分拣方法,其包括机架,机架上设置有工件平台单元、工业相机平台单元、视觉处理平台单元和机器人rc控制单元,工件平台单元用于输送工件,工业相机平台单元为工业相机,视觉处理平台单元与工业相机平台单元相连以用于接收工业相机平台采集的图像并分析,机器人rc控制单元包括控制柜和四轴并联机器人,控制柜与视觉处理平台单元相连;工件在机架上通过工件平台单元传输,然后经过工业相机平台单元对工件图像进行采集,工业相机平台单元将图像发送给视觉处理平台单元,视觉处理平台单元对图像进行接收和分析,最后控制柜基于视觉处理平台单元的分析结构控制四轴并联机器人对不同种类的工件进行分拣抓取。
4.针对上述中的相关技术,发明人认为这种分拣系统上的工业相机大多从工件正上方对工件图像进行单次采集,当工件俯视时的形状或图案相似时,对工业相机采集的图片进行分析时容易出现混淆,进而导致分拣时容易出现差错,因此有待改善。
技术实现要素:
5.为了使工业相机在分拣时从不同方向上对工件进行图像采集,降低分析采集图像时出现的错误率,本技术提供一种基于机器视觉的四轴并联机器人分拣系统。
6.本技术提供的一种基于机器视觉的四轴并联机器人分拣系统采用如下的技术方案:一种基于机器视觉的四轴并联机器人分拣系统,包括工作台,所述工作台上设置有输送带和处理器,所述工作台上还设置有用于采集工件图像的工业相机和用于分拣工件的四轴并联机器人,所述工业相机和四轴并联机器人均与处理器相连;所述工作台上固定设置有一组安装块,所述安装块之间设置有弧形板,所述弧形板位于输送带的上方,所述弧形板上套设有套筒,所述工业相机安装在套筒朝向输送带方向的一侧上;所述套筒滑移设置在弧形板上,所述工作台上设置有往复组件,所述往复组件用于驱动套筒在弧形板上往复滑移。
7.通过采用上述技术方案,输送带将工件在工作台上进行输送,工业相机对工件进行图像采集,工业相机将采集的图像传输给处理器,处理器对采集的图像进行分析并控制四轴并联机器人对工件进行分拣;当工业相机在对工件进行图像采集时,通过往复组件驱动套筒在弧形板上往复滑移,套筒在滑移时可以使得工业相机从不同角度方向对工件进行
图像采集,处理器对多个不同角度方向上的工件图像进行分析,可以减少分析工件形状时的出错率,提高了分拣时的精确度。
8.可选的,所述往复组件包括齿条、支架、第一电机、转盘、扇形齿轮、连接板和连接块,所述支架固定设置在工作台上,所述第一电机固定安装在支架上,所述转盘与第一电机的驱动轴固定连接,所述连接块固定设置在转盘的外侧壁上;所述扇形齿轮转动设置在支架的端壁上,所述连接板与扇形齿轮的端壁相固定,所述连接板上沿其长度方向开设有连接槽,所述连接块滑移设置在连接槽内;所述齿条固定设置在套筒远离输送带方向的一侧上,所述齿条沿弧形板的长度方向设置,所述齿条与扇形齿轮之间相互啮合。
9.通过采用上述技术方案,需要驱动套筒在弧形板上往复滑移时,通过第一电机带动转盘转动,转盘在转动时,带动连接块与连接槽的内侧壁相抵,连接块带动扇形齿轮转动,而转盘在不停转动时,带动连接块在连接槽内不断往复滑移,进而带动扇形齿轮不断摇摆,而由于扇形齿轮与齿条之间啮合,扇形齿轮在不断摇摆时,带动套筒在弧形板上不断往复滑移,进而使得套筒上的工业相机可以从不同角度方向对工件图像进行采集。
10.可选的,所述弧形板的外侧壁上对称固定设置有一组转动轴,所述转动轴贯穿安装块,所述工作台上设置有旋转组件,所述旋转组件用于驱动转动轴转动。
11.通过采用上述技术方案,在对工件图像进行分析时,如果处理器无法对图像进行分析,此时处理器默认工业相机采集的图像并不完整,通过旋转组件控制转动轴与安装块之间转动,进而带动弧形板在工作台上转动,弧形板转动可以进一步改变工业相机的拍摄角度,扩大了工业相机的拍摄范围,不同角度方向上进行图像采集,进一步便于处理器对工件的形状颜色进行分析,提高分拣时的精确度。
12.可选的,所述旋转组件包括第二电机、蜗轮和蜗杆,所述第二电机固定设置在工作台上,所述第二电机的驱动轴与蜗杆相互固定,所述蜗轮固定设置在转动轴的外侧壁上,所述蜗轮和蜗杆之间相互啮合。
13.通过采用上述技术方案,需要驱动弧形板在工作台上转动时,通过第二电机带动蜗杆转动,蜗杆与蜗轮相抵,进而带动蜗轮转动,进而带动转动轴转动,进而控制弧形板在两个安装块之间转动,调节弧形板与工作台之间的角度,进而扩大了工业相机的拍摄范围。
14.可选的,所述第二电机与处理器相连,所述处理器用于在对工业相机采集的图像分析出现差错时控制第二电机工作。
15.通过采用上述技术方案,当处理器无法对工业相机采集的图像进行分析时,处理器自动控制第二电机工作,带动弧形板转动,以实现工业相机拍摄角度更换的自动控制,无需人为控制第二电机工作,提高了设备工作的自动化程度。
16.可选的,所述套筒朝向工业相机的一侧上固定设置有伸缩管,所述伸缩管包括固定管和滑移管,所述固定管固定设置在套筒外侧壁上,所述滑移管套设在固定管的外侧壁上,所述工业相机安装在滑移管远离固定管方向的一端,所述套筒上设置有伸缩组件,所述伸缩组件用于驱动滑移管在固定管的外侧壁上滑移。
17.通过采用上述技术方案,当在对工件上的标签进行识别时,标签可能存在不清楚的情况,此时需要将工业相机靠近工件,通过伸缩组件驱动滑移管在固定管上滑移,进而带动伸缩管进行伸缩,将工业相机靠近或者远离输送带,改变工业相机与工件之间的距离,从而便于工业相机对不清楚的标签进行图像采集识别,减少了标签识别时出现差错的几率。
18.可选的,所述滑移管的内侧壁和固定管的外侧壁相互贴合,所述伸缩组件包括第三电机、丝杆和伸缩块,所述第三电机固定设置在套筒上,所述丝杆与第三电机的驱动轴相互固定,所述伸缩块固定设置在滑移管的外侧壁上,所述丝杆和伸缩块之间螺纹连接。
19.通过采用上述技术方案,需要驱动伸缩管伸缩时,通过第三电机带动丝杆转动,此时滑移管与固定管相抵,进而带动伸缩块在丝杆外侧壁上滑移,进而带动滑移管在固定管的外侧壁上滑动,从而控制伸缩管伸缩,使工业相机远离或者靠近输送带。
20.可选的,所述工业相机上设置有距离传感器,所述距离传感器和第三电机均与处理器相连,所述距离传感器用于检测工业相机与工件之间的距离并将距离数据传输给处理器,所述处理器用于在距离数据小于设定值时控制第三电机停止工作。
21.通过采用上述技术方案,当通过第三电机带动工业相机靠近或者远离输送带时,距离传感器对工业相机与工件之间的距离进行检测,距离传感器将距离信号传输给处理器,处理器对距离信号进行分析,当距离数据小于设定值时,处理器控制第三电机停止工作,避免工业相机与工件碰撞,提高分拣时的安全性。
22.综上所述,本技术包括以下至少一种有益技术效果:1.通过设置安装块、弧形板、套筒、齿条、支架、第一电机、转盘、扇形齿轮、连接板和连接块,当工件在输送带上输送时,第一电机带动套筒在弧形板上往复滑移,套筒在滑移时可以带动工业相机从不同角度方向对工件进行图像采集,处理器对多个不同角度方向上的工件图像进行分析,可以减少分析工件形状时的出错率,提高了分拣时的精确度;2.通过设置转动轴、第二电机、蜗轮和蜗杆,在对工件图像进行分析时,如果处理器无法对图像进行分析,通过第二电机带动弧形板在两个安装块之间转动,进一步改变工业相机的拍摄角度,扩大了工业相机的拍摄范围,进一步便于处理器对工件的形状颜色进行分析;3.通过设置固定管、滑移管、第三电机、丝杆、伸缩块和距离传感器,当在对工件上的标签进行识别时,标签可能存在不清楚的情况,通过第三电机驱动滑移管在固定管上滑移,进而带动伸缩管进行伸缩,将工业相机靠近或者远离输送带,改变工业相机与工件之间的距离,从而便于工业相机对不清楚的标签进行图像采集识别,减少标签识别时出现差错的几率。
附图说明
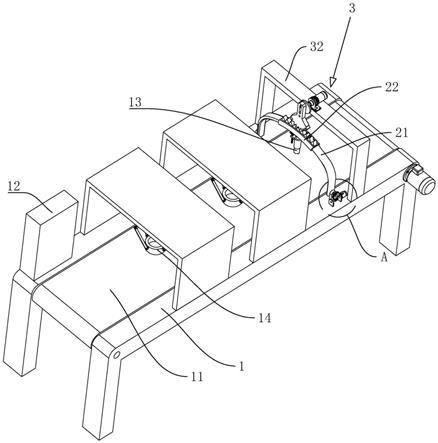
23.图1是本技术实施例提供的一种基于机器视觉的四轴并联机器人分拣系统的结构示意图。
24.图2是本技术实施例中图1中a部分的放大图。
25.图3是用于体现本技术实施例中往复组件的示意图。
26.图4是本技术实施例提供的一种基于机器视觉的四轴并联机器人分拣系统的系统框图。
27.附图标记说明:1、工作台;11、输送带;12、处理器;13、工业相机;14、四轴并联机器人;2、安装块;21、弧形板;211、转动轴;22、套筒;3、往复组件;31、齿条;32、支架;33、第一电机;34、转盘;35、扇形齿轮;36、连接板;361、连接槽;37、连接块;4、旋转组件;41、第二电机;42、蜗轮;43、蜗杆;5、伸缩管;51、固定管;52、滑移管;6、伸缩组件;61、第三电机;62、丝杆;
63、伸缩块;7、距离传感器。
具体实施方式
28.以下结合附图1
‑
4对本技术作进一步详细说明。
29.本技术实施例公开一种基于机器视觉的四轴并联机器人分拣系统。参照图1,其包括工作台1,工作台1上设置有输送带11和处理器12,输送带11用于输送工件。工作台1上还设置有工业相机13和四轴并联机器人14,工业相机13位于输送带11的上方,工业相机13和四轴并联机器人14均与处理器12相连,当输送带11将工件在输送台上输送时,工业相机13在工件上方对工件进行图像采集,工业相机13将采集的工件图像传输给处理,处理器12对图像进行分析以获取工件的形状大小等图像信息,最后处理器12根据图像信息控制四轴并联机器人14对工件进行分拣。
30.参照图1和图2,工作台1上对称焊接固定设置有一组安装块2,安装块2位于输送带11的两侧,安装块2之间设置有弧形板21,弧形板21位于输送带11的上方。弧形板21上套设有套筒22,工业相机13安装在套筒22朝向输送带11方向的一侧上。工作台1上设置有往复组件3,工业相机13在进行图像采集时,通过往复组件3驱动套筒22在弧形板21上沿弧形板21的长度方向往复滑移,工业相机13可以从不同角度方向对工件进行多次图像采集,此时处理器12再对图像进行分析,多张不同角度的照片有利于处理器12对工件精准分析,减少分拣时出现的差错。
31.参照图1和图3,往复组件3包括齿条31、支架32、第一电机33、转盘34、扇形齿轮35、连接板36和连接块37,支架32通过焊接固定设置在工作台1上,第一电机33通过螺栓固定安装在支架32上,转盘34与第一电机33的驱动轴固定连接,连接块37固定设置在转盘34的外侧壁上,连接块37靠近转盘34的端壁。扇形齿轮35通过销轴转动设置在支架32的端壁上,连接板36与扇形齿轮35之间一体成型。连接板36上沿其长度方向开设有连接槽361,连接块37滑移设置在连接槽361内,连接块37的外侧壁和连接槽361的内侧壁相互贴合。齿条31焊接固定设置在套筒22远离输送带11方向的一侧上,齿条31的长度方向沿弧形板21的长度方向设置,齿条31与扇形齿轮35之间相互啮合。通过第一电机33带动转盘34转动,进而带动连接块37与连接槽361内侧壁相抵,连接块37在连接槽361内往复滑移,带动扇形齿轮35不断摆动,扇形齿轮35与齿条31相抵,从而使套筒22在弧形板21上往复滑移,改变工业相机13的拍摄角度和方向。
32.参照图2和图4,弧形板21的外侧壁上对称固定设置有一组转动轴211,转动轴211贯穿安装块2,弧形板21通过转动轴211转动设置在安装块2之间。工作台1上设置有旋转组件4,旋转组件4包括第二电机41、蜗轮42和蜗杆43,第二电机41固定安装在工作台1上,第二电机41的驱动轴与蜗杆43相互连接固定,蜗轮42固定设置在转动轴211的外侧壁上,蜗轮42和蜗杆43之间相互啮合。第二电机41与处理器12相连,当处理器12无法对工业相机13采集的图像进行分析时,处理器12可以控制第二电机41工作,第二电机41带动蜗杆43转动,进而带动蜗轮42转动,自动控制弧形板21在安装块2之间转动,改变弧形板21与工作台1之间电机角度,此时工业相机13再进行拍摄,进一步扩大了工业相机13的拍摄范围,便于处理器12对难以分辨的工件进行分析。
33.参照图3,套筒22朝向工业相机13的一侧上固定设置有伸缩管5,伸缩管5包括固定
管51和滑移管52,固定管51固定设置在套筒22朝向输送带11方向的一侧上,滑移管52套设在固定管51的外侧壁上,滑移管52的内侧壁和固定管51的外侧壁相互贴合,工业相机13固定安装在滑移管52远离固定管51方向的一端。套筒22上设置有伸缩组件6,伸缩组件6包括第三电机61、丝杆62和伸缩块63,第三电机61固定设置在套筒22外侧壁上,丝杆62与第三电机61的驱动轴相互连接固定。伸缩块63通过焊接固定设置在滑移管52的外侧壁上,伸缩块63与丝杆62之间螺纹连接。在对工件进行标签识别时,可能由于工件较小,标签存在不清楚的情况,此时通过第三电机61带动丝杆62转动,带动伸缩块63在丝杆62外侧壁上滑移,进而滑移管52在固定管51上滑移,从而实现伸缩管5的伸缩,对工业相机13与工件之间的距离进行调节,以便于工业相机13对不清楚的表情进行图像采集。
34.参照图3和图4,工业相机13上设置有距离传感器7,距离传感器7和第三电机61均与处理器12相连,当伸缩组件6驱动滑移管52在固定管51的外侧壁上滑移时,距离传感器7对工业相机13与工件之间的距离进行检测,距离传感器7将检测的距离信号传输个处理器12,处理器12对距离信号进行分析,并在当距离数据小于设定值时,处理器12控制第三电机61停止工作,避免工业相机13与工件之间发生碰撞。
35.本技术实施例一种基于机器视觉的四轴并联机器人分拣系统的实施原理为:当工业相机13对工件图像进行采集时,第一电机33驱动转盘34转动,带动连接块37与连接槽361内侧壁相抵,进而带动扇形齿轮35不停摆动,扇形齿轮35与齿条31相抵,带动套筒22在弧形板21上往复滑移,从而工业相机13可以从不同角度方向上对工件进行图像采集,处理器12对多个不同角度方向上的工件图像进行分析,可以减少分析工件形状时的出错率,提高了分拣时的精确度。
36.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。