1.本发明涉及智能机器人技术领域,具体涉及一种移动机器人性能测试方法、系统及其存储装置。
背景技术:
2.目前随着智能制造的提出,机器人领域发展迅猛,目前对机器人性能的判断,还没有一个标准,而标准对于任何一个行业来说都是至关重要的,无论是技术进步还是市场拓展,都需要标准以及优质的测试手段作为支撑。当前市场上管道机器人、巡检机器人、探测机器人、消防机器人、排雷机器人、agv等产品需求与日俱增,而如果这些机器人的性能标准不一致的话,很容易对后续机器人技术的发展造成不可估计的影响。因此,在这一系列标准制定中,对移动机器人坡道运行、坡道驻车的性能进行全面测试就显得非常重要了。
3.现有技术中,有一种机器人移动性能的评估方法及其评估装置,通过采用数据采集设备按照预设的数据采集周期,在机器人的移动过程中采集位置和角度,确定出每个数据采集周期对应的数据点,并对各数据点进行筛选以筛选出静止点和运动点,再基于静止点的位置和角度,对机器人的定位性能进行评估,基于运动点的位置对机器人的导航性能进行评估,从而实现了对机器人的定位性能和导航性能进行测试和评估;并且,该种评估方法可以适用于工业应用场景下的定位精度、导航精度的长时间自动化测试,自动化程度较高,且操作简便,可以大幅提高对机器人的定位性能和导航性能评估的准确度和可靠性。
4.虽然上述方案能在机器人移动过程中对其定位性能以及导航性能进行测试评估,但是其都是基于机器人能够稳定持续移动的基础上的研究,而对于机器人持续稳定移动的性能测试评估,该方案尚未考虑到。因此,目前对于移动机器人持续稳定移动的研究,例如坡道运行能力、坡道驻车能力的研究就显得十分重要。
技术实现要素:
5.本发明意在提供一种移动机器人性能测试方法、系统及其存储装置,以解决移动机器人移动性能测试的技术问题。
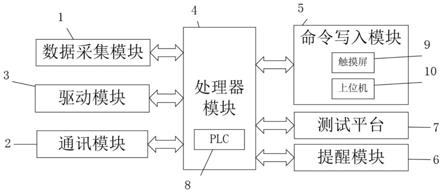
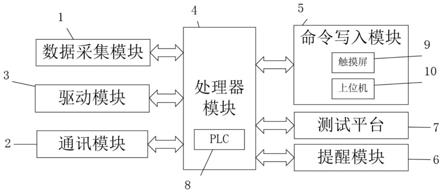
6.为达到上述目的,本发明采用如下技术方案:一种移动机器人性能测试系统,包括处理器模块,以及与处理器模块分别连接的数据采集模块、通讯模块、驱动模块、命令写入模块、提醒模块和测试平台;
7.所述测试平台包括可改变坡度的测试跑道和设于测试跑道上的可移动防护闸门;所述测试平台用来为移动机器人性能测试提供判断依据和测试场地;
8.所述数据采集模块包括超声波传感器和角度传感器;所述数据采集模块用来采集所述测试跑道的坡度数据和所述防护闸门与移动机器人之间的距离数据形成数据包,并将数据包发送给处理器模块;
9.所述通讯模块,用来为处理器模块和命令写入模块提供通讯通道;
10.所述驱动模块,用来为移动机器人、防护闸门以及测试跑道的状态改变提供动力;
11.所述命令写入模块包括触摸屏和上位机;所述命令写入模块用来向处理器模块发送控制移动机器人和测试跑道的动作指令;
12.所述提醒模块,用来在测试过程中当停止条件触发时发出提醒信号;
13.所述处理器模块包括plc,即可编程逻辑控制器;所述处理器模块用来对所述数据包和所述动作指令进行计算分析,然后按照预设程序作出相应动作判断,并发送相应的动作命令给移动机器人、防护闸门和测试跑道。
14.本方案的原理及优点是:实际应用时,测试平台为移动机器人的性能测试提供判断依据和测试场地,同时数据采集模块采集测试过程中的各种数据,例如坡度和移动距离以及移动速度等,为测试结果的分析提供充足的测试数据;通讯模块能够起到通讯功能,以便实现对测试过程的控制;其中最重要的是处理器,其中的plc起到整个处理控制作用,保证对移动机器人的各项性能进行有序测试,最终对机器人作出性能评价。
15.本发明还提供了一种移动机器人性能测试方法,包括以下步骤:
16.步骤s1,准备好测试平台和移动机器人,并将测试平台校零,根据机器人尺寸调节防护闸门的保护距离并设置运行参数;
17.步骤s2,在命令写入模块中设置移动机器人的运动模式,将移动机器人放置在测试起点位置,然后打开防护闸门;
18.步骤s3,启动移动机器人,按照预设测试步骤分别对移动机器人进行各项性能测试,测试过程中,防护闸门自动跟随移动机器人运动,使防护闸门与移动机器人之间的距离维持在安全距离;
19.步骤s4,当测试过程中停止条件被触发,处理器模块控制测试系统停止运行,并由提醒模块发出提醒信号;
20.步骤s5,测试结束后打开防护闸门,取出移动机器人,然后将测试平台调节回零位。
21.本方法的优点在于:根据系统中预设的程序,对移动机器人逐个进行地面平台起步以及坡道定点起步的测试,其中又包括先固定坡度再启动移动机器人和坡度提升和机器人同时动作的性能测试,不仅使整个测试过程简单清晰,保证了测试过程的高效率和测试结果的准确性,同时也能够对机器人的性能进行全方面的测试,为开发者对机器人的性能评估提供可靠的依据。
22.优选的,作为一种改进,测试平台校零为,将防护闸门调整到测试跑道的起点端,以及将测试跑道的坡度调整到0度。
23.开始测试前,将防护闸门和测试跑道校零,以便在移动机器人移动过程中通过改变坡度对移动机器人的爬坡能力进行测试,同时防护闸门跟随运动,对移动机器人起保护作用。
24.优选的,作为一种改进,测试起点位置包括地面起点和跑道起点。
25.设置两个测试的起点位置,以便能对移动机器人进行多方面的测试,提高测试的全面性,提高移动机器人的综合能力。
26.优选的,作为一种改进,预设测试步骤包括,
27.步骤s31,将移动机器人放置在地面起点,当移动机器人通过闸门检测开关时,闸门自动关闭;移动机器人在移动过程中,数据采集模块检测到防护闸门与移动机器人之间
的距离大于安全距离时,防护闸门开始跟随移动机器人运动,同时测试跑道开始做增加坡度的提升运动,当坡度到达预设角度位置时停止提升,跟随继续运行;
28.步骤s32,先将测试跑道提升到预设角度位置,再将移动机器人放置在地面起点,当移动机器人通过闸门检测开关时,闸门自动关闭;移动机器人在移动过程中,数据采集模块检测到防护闸门与移动机器人之间的距离大于安全距离时,防护闸门开始跟随移动机器人运动;
29.步骤s33,将移动机器人放置在跑道起点,手动关闭闸门,移动机器人开始移动,数据采集模块检测到防护闸门与移动机器人之间的距离大于安全距离时,防护闸门开始跟随移动机器人运动,同时测试跑道开始做增加坡度的提升运动,当坡度到达预设角度位置时停止提升,跟随继续运行;
30.步骤s34,将移动机器人放置在跑道起点,手动关闭闸门,将测试跑道提升到预设角度位置,然后移动机器人开始移动,数据采集模块检测到防护闸门与移动机器人之间的距离大于安全距离时,防护闸门开始跟随移动机器人运动。
31.设置了4个不同的测试内容,通过控制变量法,首先对移动机器人进行移动与坡道提升同步的测试,同时还进行闸门跟随测试,以保护机器人;其次先将坡道提升,然后再测试移动机器人的爬坡能力;后续接着对移动机器人进行在坡道定点起步的测试,以完成多方位测试,从而对移动机器人进行全方位评价。
32.优选的,作为一种改进,停止条件为,闸门保护开关接通或移动机器人停止或闸门到达机械限位。
33.设置了三个停止条件,当其中任意一个触发时,系统停止运行,不仅保护移动机器人,同时也避免使测试平台损坏。
34.优选的,作为一种改进,移动机器人停止包括到达预设位置停止和未到达预设位置自然停止。
35.移动机器人停止设置两种情况,若正常运行到预设位置停止,则表明移动机器人爬坡性能合格,若还未到预设位置就自然停止,则表明移动机器人爬坡性能还有待提高。
36.优选的,作为一种改进,测试步骤还包括对移动机器人进行极限坡度爬坡测试、坡度随时可调测试和下坡稳定性测试。
37.增加移动机器人的测试内容,更进一步对移动机器人的性能进行评价,提高测试行为的价值和移动机器人本身的价值。
38.优选的,作为一种改进,极限坡度爬坡测试为,移动机器人在跑道坡度最大的条件下,移动机器人移动到测试跑道的预设位置。
39.测试出移动机器人的极限爬坡能力,以便后期更好对移动机器人应用,避免出现应用场所错误的情况。
40.本发明还提供了一种存储装置,存储装置存储有一个或多个程序;所述一个或多个程序可被处理器模块执行,以实现如权利要求2
‑
9任意一项所述的一种移动机器人性能测试方法。
41.本存储装置的优点在于,为移动机器人的测试方法提供一个载体,能够存储若干测试方法,同时在实际测试时能快速调用,简化了方法调用的过程,提高了系统对机器人性能的测试能力与测试效率。
附图说明
42.图1为本发明一种移动机器人性能测试方法、系统及其存储装置实施例一的系统示意图。
43.图2为本发明一种移动机器人性能测试方法、系统及其存储装置实施例一的测试流程示意图。
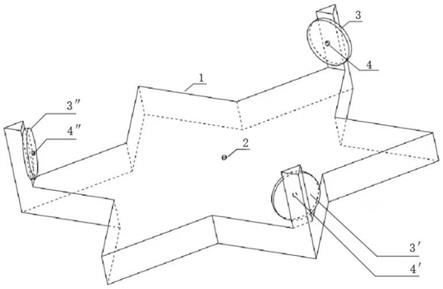
44.图3为本发明一种移动机器人性能测试方法、系统及其存储装置实施例一的测试平台示意图。
具体实施方式
45.下面通过具体实施方式进一步详细说明:
46.说明书附图中的标记包括:数据采集模块1、通讯模块2、驱动模块3、处理器模块4、命令写入模块5、提醒模块6、测试平台7、plc8、触摸屏9、上位机10。
47.实施例一:
48.本实施例基本如附图1所示:一种移动机器人性能测试系统,包括处理器模块4,以及与处理器模块4分别连接的数据采集模块1、通讯模块2、驱动模块3、命令写入模块5、提醒模块6和测试平台7;
49.如附图3所示,测试平台7包括可改变坡度的测试跑道和设于测试跑道上可在跑道前进方向上移动的高度可调的防护闸门,测试跑道的长度是宽度的2倍,跑道的宽度是移动机器人宽度的5倍,防护闸门整体呈拱型,防护闸门的宽度与跑道宽度相同,防护闸门的高度可根据被测移动机器人的高度随时调节;测试平台7用来为移动机器人的性能测试提供判断依据和测试场地;
50.数据采集模块1包括超声波测距传感器和x
‑
y角度传感器;数据采集模块1用来采集测试跑道的坡度数据、防护闸门与移动机器人之间的距离数据形成数据包,并将数据包发送给处理器模块4;
51.通讯模块2,用来为处理器模块4和命令写入模块5提供通讯通道;
52.驱动模块3,用来为移动机器人、防护闸门以及测试跑道的状态改变提供动力;
53.命令写入模块5包括触摸屏9和上位机10;触摸屏9用来人工输入控制命令,并将控制命令发送给上位机10;上位机10接收控制命令,并向处理器模块4发送控制移动机器人和测试装置的动作指令;
54.提醒模块6,用来在测试过程中当停止条件触发时,通过指示灯闪烁发出提醒信号;
55.处理器模块4包括plc8,即可编程逻辑控制器;处理器模块4用来对数据包和动作指令进行计算分析,然后按照预设程序作出相应动作判断,并发送相应的动作命令给移动机器人、防护闸门和测试跑道。
56.一种移动机器人性能测试方法,如附图2所示,包括以下步骤:
57.步骤s1,准备好测试平台7和移动机器人,并将测试平台7校零,根据机器人尺寸调节防护闸门的保护距离并设置运行参数;
58.步骤s2,在命令写入模块5中设置移动机器人的运动模式,将移动机器人放置在测试起点位置,然后打开防护闸门;
59.步骤s3,启动移动机器人,按照预设测试步骤分别对移动机器人进行各项性能测试,测试过程中,防护闸门自动跟随移动机器人运动,使防护闸门与移动机器人之间的距离维持在安全距离;
60.步骤s4,当测试过程中停止条件被触发,处理器模块4控制测试系统停止运行,并由提醒模块6发出提醒信号;
61.步骤s5,测试结束后打开防护闸门,取出移动机器人,然后将测试平台7调节回零位。
62.防护闸门的保护距离由用户自定义,跑道角度提升的速度在0
‑
5度/秒范围内,跑道的坡度在0
‑
45度范围内,机器人的尺寸在宽80厘米,高60厘米的范围内。
63.本实施例中,防护闸门的保护距离设置为10厘米,跑道角度提升的速度为3度/秒,跑道的坡度预设为40度,移动机器人的移动速度为5厘米/秒。将保护距离设置为10厘米,能够对机器人进行有效保护,避免机器人损坏,同时跑道角度提升的速度为3度/秒,能够保证跑道的角度提升速度不会过快导致机器人不能完成爬坡测试,而且将坡度设置为40度能够保证机器人完成此项测试的性能满足实际应用场景的要求;移动机器人的移动速度为5厘米/秒能够避免因速度过快导致机器人倾倒等情况发生。
64.测试平台7为机器人的爬坡性能测试提供测试场地,同时也能为爬坡性能提供判断依据,通过显示屏设置跑道的坡度以及机器人的运行模式,测试机器人在不同坡度下的爬坡能力以及在不同方式下的爬坡能力,能为对机器人的爬坡性能综合评价提供可靠数据;同时在测试过程中,通过设置的数据采集模块1采集,采集机器人的运行速度以及防护闸门与机器人的距离,使防护闸门跟随机器人运动,对机器人起到保护作用,防止机器人倾倒而损坏。
65.本实施例的具体实施过程如下:
66.第一步,准备好测试平台7和移动机器人,并将测试平台7校零,即将防护闸门调整到测试跑道的起点端,以及将测试跑道的坡度调整到0度,根据移动机器人尺寸调节防护闸门的保护距离为10厘米,并设置移动机器人的运动终点位置为跑道终点,移动机器人的移动速度为5厘米/秒,跑道角度的提升速度为3度/秒,跑道的坡度预设为40度。
67.第二步,在命令写入模块5的触摸屏9上设置移动机器人的运动模式为自动模式,然后将移动机器人放置在测试起点位置并手动打开防护闸门。
68.第三步,进行地面平台起步,跑道提升与跟随同步动作测试,将移动机器人放置在地面起点,启动移动机器人,移动机器人开始以5厘米/秒的速度移动,当移动机器人通过闸门检测开关时,闸门自动关闭;移动机器人在移动过程中,超声波测距传感器检测到防护闸门与移动机器人之间的距离大于10厘米时,防护闸门开始以5厘米/秒的速度跟随移动机器人运动,同时测试跑道开始以3度/秒的速度提升坡度,当坡度到达预设的40度位置时停止提升,跟随继续运行,使防护闸门与移动机器人之间的距离维持在10厘米。
69.第四步,进行地面平台起步,先提升跑道再跟随运动测试,先启动跑道坡度提升,将坡度提升到预设的40度位置上,再将移动机器人放置在地面起点,然后再启动移动机器人,移动机器人开始以5厘米/秒的速度;当移动机器人通过闸门检测开关时,闸门自动关闭;移动机器人在移动过程中,超声波测距传感器检测到防护闸门与移动机器人之间的距离大于10厘米时,防护闸门开始以5厘米/秒的速度跟随移动机器人运动,使防护闸门与移
动机器人之间的距离维持在10厘米。
70.第五步,进行跑道定点起步,跑道提升与跟随同步动作测试,将移动机器人放置在跑道起点,手动关闭闸门,启动移动机器人,移动机器人开始以5厘米/秒的速度移动,超声波测距传感器检测到防护闸门与移动机器人之间的距离大于10厘米时,防护闸门开始跟随移动机器人运动,同时测试跑道开始做增加坡度的提升运动,当坡度到达预设的40度位置时停止提升,跟随继续运行,使防护闸门与移动机器人之间的距离维持在10厘米。
71.第六步,进行跑道定点起步,先提升跑道再跟随运动测试,将移动机器人放置在跑道起点,手动关闭闸门,将测试跑道提升到预设的40度位置,然后启动移动机器人,移动机器人开始以5厘米/秒的速度移动,超声波测距传感器检测到防护闸门与移动机器人之间的距离大于10厘米时,防护闸门开始跟随移动机器人运动,使防护闸门与移动机器人之间的距离维持在10厘米。
72.第七步,当测试过程中闸门保护开关接通或闸门到达机械限位或者移动机器人移动到了预设位置而停止时,plc8控制测试系统停止运行,并由提醒模块6发出灯光闪烁提醒信号。
73.第八步,测试结束,测试结束后打开防护闸门,取出移动机器人,然后将测试平台7调节回零位。
74.随着科技的发展,人工智能领域和机器人领域相关的技术也得到了深入研究,目前对于机器人的应用范围越来越广,例如在工业、商业和服务业,而在机器人的具体应用过程中,最低的要求则是保证机器人的性能强大与稳定。目前在绝大多数机器人的拓展应用中,大多都只是对其附加功能的研究,例如导航、定位或者智能显示,而在机器人实现拓展功能的过程中,都会涉及到产生位移、运动,但是现在的机器人应用领域大多都忽略了对机器人运动性能的研究,尤其上机器人的生产厂商为了节约成本,并没有针对机器人的具体应用场景作出性能测试。而在本方案中,能够通过性能测试系统以及测试平台的配合,模拟机器人在实际应用过程中的运动性能,例如机器人的爬坡能力、坡道驻车能力、不规则路面的运动能力等,能够通过对机器人进行基础的运动性能测试,为机器人的后期应用提供参考依据以及为机器人的开发人员提供性能测试数据,以便开发人员针对机器人的性能缺陷进行改进,促进机器人技术的发展,同时也能够使用户知晓机器人的性能表现,使用户根据机器人的性能针对性地选择应用场景,提高用户对机器人的使用体验感。
75.实施例二:
76.本实施例基本与实施例一相同,区别在于:对移动机器人进行极限坡度爬坡性能测试,测试当移动机器人能运动到在跑道上预设的位置条件下,跑道坡度的最大角度值,通过在显示屏上实时调整坡度角度值来进行测试。
77.通过加入对移动机器人的极限坡度爬坡性能测试,能测试出该移动机器人所能完成的最大坡度,以便后续在移动机器人的使用说明中进行备注,使用者将移动机器人合理使用在坡道环境中,避免因性能不达标出现运行效果差或者运行过程中出现倾倒等意外情况,提高对该移动机器人的综合运用能力。
78.本实施例的具体实施过程与实施例一相同,区别在于增加一个性能测试:
79.极限坡度爬坡性能测试,将移动机器人放置在地面起点,先将测试跑道提升到45度,测试移动机器人能否运动到在跑道上预设的终点位置;
80.若当前坡度下,移动机器人能顺利运动到跑道上预设的终点位置,则每次提升5度的坡度,继续让移动机器人进行爬坡测试,直到测试出机器人能到达预设的终点位置时,跑道坡度的最大值,即极限坡度;
81.若当前坡度下,移动机器人不能顺利运动到跑道上预设的终点位置,则每次减少5度的坡度,继续让移动机器人进行爬坡测试,直到测试出机器人能到达预设的终点位置时,跑道坡度的角度值,即极限坡度。
82.测试机器人在能够移动到测试跑道的预设位置条件下,对应的跑道坡道的最大值,能够测试出机器人的极限爬坡性能,对机器人的爬坡性能进行全面分析,同时在坡度的选择上用中值法,首先选定45度的坡度进行测试,然后根据当前的测试效果再依次测试不同的坡度,提高测试效率。
83.实施例三:
84.本实施例基本与实施例一相同,区别在于:在移动机器人的性能测试中,加入对移动机器人的坡度随时可调测试,即在移动机器人的运动过程中,随机调整跑道的坡度,用以测试移动机器人运动的稳定性能。
85.通过对移动机器人在不同坡度变化的情况下的性能进行测试,能够更加具体清楚地得到移动机器人的性能特性,尤其是在地面起伏不定或者凹凸不平的情况下,该移动机器人的运行稳定性能,不仅能提高对该移动机器人的认知程度,同时还为研发者对该移动机器人的不足指明改进方向,促进机器人技术领域的发展。
86.本实施例的具体实施过程与实施例一相同,区别在于增加一个性能测试:
87.坡度随时可调测试,将移动机器人放置在跑道起点,手动关闭闸门,启动移动机器人,移动机器人开始以5厘米/秒的速度移动,超声波测距传感器检测到防护闸门与移动机器人之间的距离大于10厘米时,防护闸门开始跟随移动机器人运动,使防护闸门与移动机器人之间的距离维持在10厘米;在移动机器人移动的同时,通过在显示屏上控制测试跑道开始随机改变坡度,当坡度增加到30度时,控制坡度逐级减小5度,然后又逐级增加10度,重复以上操作,以测试移动机器人在坡度起伏变化的情况下,在跑道上运行的稳定性。
88.通过逐级增加10或者逐级减小5度循环改变坡道角度值,模拟出机器人在起伏不定的地面条件下的运动情况,既能体现坡度的有效改变,又不会因坡度改变幅度过大导致机器人的性能测试不理想,通过循环改变坡道角度值测试出机器人在起伏不定的地面条件下的移动性能,保证最大程度上对机器人的性能进行测试分析,提供可靠的测试数据。
89.实施例四:
90.本实施例与实施例三基本相同,区别在于:在移动机器人的性能测试中,再次增加一个对移动机器人的下坡稳定性测试,测试移动机器人在不同的坡度条件下,下坡过程中是否会出现倾倒以及速度无法控制等意外情况,对移动机器人的综合性能作出最准确的评价。
91.通过在上述的各项测试中加入对移动机器人下坡的测试,不仅操作简单,不需要额外设置设备条件,只需在移动机器人完成爬坡测试后,将移动机器人手动调换方向,使之在跑道上向下运动即可;同时在测试过程中,防护闸门还是能时刻跟随移动机器人运动,对其起到保护作用,通过对移动机器人的下坡性能的测试,能更加全面地了解移动机器人的综合性能,以便后续在对移动机器人实际应用过程中,选择合适的场地,避免出现场地与性
能不匹配的情况,从而达不到预期的运行效果。
92.本实施例的具体实施过程与实施例三相同,区别在于:
93.第七步,当测试过程中闸门保护开关接通或移动机器人停止或闸门到达机械限位,plc8控制测试系统停止运行,并由提醒模块6发出灯光闪烁提醒信号;手动将灯光闪烁提醒复位,然后将移动机器人调头,再次启动测试系统进行下坡测试,使移动机器人由当前停止位置向下运动到跑道起点处,运动过程中防护闸门同步向下运动,且防护闸门与移动机器人之间的距离始终保持在10厘米;若测试过程中,移动机器人速度加快或者倾倒的意外情况,plc8控制测试系统立即停止。
94.在机器人完成爬坡测试后,直接将机器人换一个运动方向就可以进行下坡测试,节省设备调整过程和时间,测试出机器人在坡道上进行下坡运动的稳定性,能够为机器人的整体性能评价提供依据,同时也可以反应机器人的实际使用场景,增加机器人的性能多面性。
95.实施例五:
96.本实施例与实施例一基本相同,区别在于:移动机器人在运动到预设位置的过程中自然停止。
97.移动机器人在爬坡过程中,除了到达预设位置停止,还有可能由于坡度太大,从而导致移动机器人在爬坡过程中就出现自然停止的情况,此时移动机器人的状态还是向前运动,但是由于坡度的原因在原地停止不能前进,此时采集移动机器人的速度和跑道的坡度等数据,可以对移动机器人的爬坡能力进行更进一步的分析,使移动机器人的性能更完善。
98.本实施例的具体实施过程与实施例一相同,区别在于:
99.第七步,当测试过程中闸门保护开关接通或闸门到达机械限位,plc8控制测试系统停止运行,并由提醒模块6发出灯光闪烁提醒信号;若是在移动机器人运动过程中,移动机器人自然停止,则记录此刻移动机器人的运动速度、跑道的坡度和移动机器人已经移动的距离等数据,然后降低跑道的坡度,直到移动机器人能够移动到预设的位置为止,并再次记录坡度数据。
100.结合实际使用场景,机器人在爬坡时可能因为坡度过大到达不了预设位置就已经因为动力不足或者其他原因停滞不前,但是机器人仍然是运动状态,则此时测试出机器人的稳定性能就显得尤其重要,能够有效避免机器人在坡道上停止时因动力持续提供而造成机器人损坏。
101.实施例六:
102.本实施例与实施例一基本相同,区别在于:增加一个对移动机器人在坡道驻车的测试,在移动机器人爬坡测试过程中,通过显示屏手动控制移动机器人在跑道任意位置停止,观察移动机器人最终的停止状态以及从运动到停止所花费的时间和前进的距离。
103.通过对移动机器人在坡道上驻车的测试,能够得到移动机器人在坡道上驻车所需要的条件以及从运动到停止所需的刹车距离,从而能在后续的研究中调整对应的运行速度和刹车系数,使移动机器人的驻车性能更优秀,提高移动机器人的综合性能。
104.本实施例的具体实施过程与实施例一相同,区别在于:
105.第三步,进行地面平台起步,跑道提升与跟随同步动作测试,将移动机器人放置在地面起点,启动移动机器人,移动机器人开始以5厘米/秒的速度移动,当移动机器人通过闸
门检测开关时,闸门自动关闭;移动机器人在移动过程中,超声波测距传感器检测到防护闸门与移动机器人之间的距离大于10厘米时,防护闸门开始以5厘米/秒的速度跟随移动机器人运动,同时测试跑道开始以3度/秒的速度提升坡度,当坡度到达预设的40度位置时停止提升,跟随继续运行,使防护闸门与移动机器人之间的距离维持在10厘米;在移动机器人运动过程中,通过显示屏输入移动机器人停止的控制命令,并从命令开始生效时刻起,记录到移动机器人停止时所用去的时间和前进的距离,驻车测试完成后,继续控制移动机器人进行爬坡测试。
106.测试机器人在坡道上的驻车能力以及刹车距离,能够对机器人在不同坡度条件下的驻车性能进行全面评估,也为机器人在实际的坡道驻车应用环节提供有力的数据支持。
107.以上所述的仅是本发明的实施例,方案中公知的具体技术方案和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明技术方案的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。