技术特征:
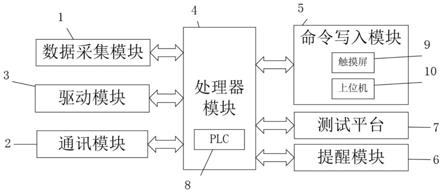
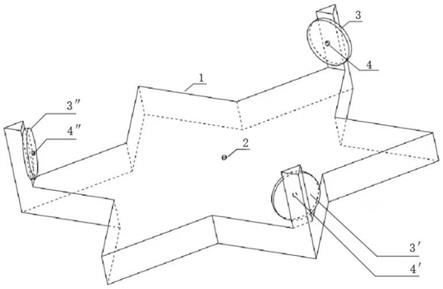
1.一种移动机器人性能测试系统,其特征在于:包括处理器模块,以及与处理器模块分别连接的数据采集模块、通讯模块、驱动模块、命令写入模块、提醒模块和测试平台;所述测试平台包括可改变坡度的测试跑道和设于测试跑道上的可移动防护闸门;所述测试平台用来为移动机器人的性能测试提供判断依据和测试场地;所述数据采集模块包括超声波传感器和角度传感器;所述数据采集模块用来采集所述测试跑道的坡度数据和所述防护闸门与移动机器人之间的距离数据形成数据包,并将数据包发送给处理器模块;所述通讯模块,用来为处理器模块和命令写入模块提供通讯通道;所述驱动模块,用来为移动机器人、防护闸门以及测试跑道的状态改变提供动力;所述命令写入模块包括触摸屏和上位机;所述命令写入模块用来人工输入控制命令,并向处理器模块发送控制移动机器人和测试装置的动作指令;所述提醒模块,用来在测试过程中当停止条件触发时发出提醒信号;所述处理器模块包括plc,即可编程逻辑控制器;所述处理器模块用来对所述数据包和所述动作指令进行计算分析,然后按照预设程序作出相应动作判断,并发送相应的动作命令给移动机器人、防护闸门和测试跑道。2.一种移动机器人性能测试方法,其特征在于,包括以下步骤:步骤s1,准备好测试平台和移动机器人,并将测试平台校零,根据机器人尺寸调节防护闸门的保护距离并设置运行参数;步骤s2,在命令写入模块中设置移动机器人的运动模式,将移动机器人放置在测试起点位置,然后打开防护闸门;步骤s3,启动移动机器人,按照预设测试步骤分别对移动机器人进行各项性能测试,测试过程中,防护闸门自动跟随移动机器人运动,使防护闸门与移动机器人之间的距离维持在安全距离;步骤s4,当测试过程中停止条件被触发,处理器模块控制测试系统停止运行,并由提醒模块发出提醒信号;步骤s5,测试结束后打开防护闸门,取出移动机器人,然后将测试平台调节回零位。3.根据权利要求2所述的一种移动机器人性能测试方法,其特征在于:所述测试平台校零为,将防护闸门调整到测试跑道的起点端,以及将测试跑道的坡度调整到0度。4.根据权利要求2所述的一种移动机器人性能测试方法,其特征在于:所述测试起点位置包括地面起点和跑道起点。5.根据权利要求2所述的一种移动机器人性能测试方法,其特征在于:所述预设测试步骤包括,步骤s31,将移动机器人放置在地面起点,当移动机器人通过闸门检测开关时,闸门自动关闭;移动机器人在移动过程中,数据采集模块检测到防护闸门与移动机器人之间的距离大于安全距离时,防护闸门开始跟随移动机器人运动,同时测试跑道开始做增加坡度的提升运动,当坡度到达预设角度位置时停止提升,跟随继续运行;步骤s32,先将测试跑道提升到预设角度位置,再将移动机器人放置在地面起点,当移动机器人通过闸门检测开关时,闸门自动关闭;移动机器人在移动过程中,数据采集模块检测到防护闸门与移动机器人之间的距离大于安全距离时,防护闸门开始跟随移动机器人运
动;步骤s33,将移动机器人放置在跑道起点,手动关闭闸门,移动机器人开始移动,数据采集模块检测到防护闸门与移动机器人之间的距离大于安全距离时,防护闸门开始跟随移动机器人运动,同时测试跑道开始做增加坡度的提升运动,当坡度到达预设角度位置时停止提升,跟随继续运行;步骤s34,将移动机器人放置在跑道起点,手动关闭闸门,将测试跑道提升到预设角度位置,然后移动机器人开始移动,数据采集模块检测到防护闸门与移动机器人之间的距离大于安全距离时,防护闸门开始跟随移动机器人运动。6.根据权利要求2所述的一种移动机器人性能测试方法,其特征在于:所述停止条件为,闸门保护开关接通或移动机器人停止或闸门到达机械限位。7.根据权利要求6所述的一种移动机器人性能测试方法,其特征在于:所述移动机器人停止包括到达预设位置停止和未到达预设位置自然停止。8.根据权利要求5所述的一种移动机器人性能测试方法,其特征在于:所述测试步骤还包括对移动机器人进行极限坡度爬坡测试、坡度随时可调测试和下坡稳定性测试。9.根据权利要求8所述的一种移动机器人性能测试方法,其特征在于:所述极限坡度爬坡测试为,移动机器人在跑道坡度最大的条件下,移动机器人移动到测试跑道的预设位置。10.一种存储装置,其特征在于:所述存储装置存储有一个或多个程序;所述一个或多个程序可被处理器模块执行,以实现如权利要求2
‑
9任意一项所述的一种移动机器人性能测试方法。
技术总结
本发明涉及智能机器人技术领域,公开了一种移动机器人性能测试方法、系统及其存储装置,包括处理器模块,以及与处理器模块分别连接的数据采集模块、通讯模块、驱动模块、命令写入模块、提醒模块和测试平台;通过写入若干测试命令,在测试平台上进行性能测试,同时利用数据采集模块采集各项测试数据,最后得出对当前测试机器人的测试结果,以对该机器人的性能进准确评价。本发明具有能对机器人持续稳定移动的性能进行测试评估的有益效果。动的性能进行测试评估的有益效果。动的性能进行测试评估的有益效果。
技术研发人员:位刚 田川 张宇 谭一川 陈铮 孙维 杨朝晖 王璇
受保护的技术使用者:中煤科工集团重庆智慧城市科技研究院有限公司
技术研发日:2021.09.01
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。