1.本发明涉及康复设备技术领域,具体涉及一种轮椅和助行外骨骼的一体化结构及其控制方法。
背景技术:
2.近年来,世界老龄化人口每年以2.5%的速度增长,其中,中国老龄化人口的增长速度达到3.3%。人口老龄化同时也伴随着人体生理功能的衰退,这其中包括人体机动性和柔韧性的下降,行走能力的丧失等,此外,越来越多的偏瘫或截瘫患者受中风、脊髓损伤、脑损伤、脑肿瘤等疾病或事故的影响,运动能力受损,其术后的康复也成为一大问题。由于人脑具有可塑性,准确及时的康复训练可以帮助脑损伤患者进行神经重组或代偿,产生新的神经运动功能细胞,重建肢体或中枢神经系统的连接,从而有利于运动功能的恢复。
3.目前,对于运动能力损伤的患者一般采用轮椅对其进行日常运动的辅助,但当患者需要进行行走康复训练时,需要护理人员辅助患者先从轮椅上起立,然后患者在护理人员的搀扶下腿部进行移动以进行腿部的康复训练,这样就使得患者无法自行的完成康复的训练,康复训练必须在护理人员的协助下进行,这样一方面使得患者无法随时随地的进行康复训练,另一方面也增加了患者康复训练的成本。
技术实现要素:
4.针对现有技术存在的上述不足,本发明要解决的技术问题是:如何提供一种能辅助患者自主进行腿部的康复训练,使得患者能根据需要随时随地的进行康复训练,并能大大降低康复成本的轮椅和助行外骨骼的一体化结构及其控制方法。
5.为了解决上述技术问题,本发明采用如下技术方案:一种轮椅和助行外骨骼的一体化结构,包括轮椅和助行外骨骼,所述轮椅包括轮椅架体、坐板和行走机构,所述助行外骨骼包括髋关节组件、膝关节组件和踝关节组件,所述髋关节组件与对应位置的所述坐板转动连接,所述轮椅架体上设有控制器、以及与所述控制器电连接的辅助站立机构和辅助行走机构,所述行走机构与所述控制器电连接,所述辅助站立机构与所述坐板连接,所述辅助站立机构能够驱动所述坐板绕所述轮椅架体竖向转动,以辅助人体进行站立,所述辅助行走机构包括左侧辅助行走组件和右侧辅助行走组件,所述左侧辅助行走组件同时连接在对应侧所述膝关节组件与人体左小腿和左大腿对应的位置,以使得所述左侧辅助行走组件能够驱动人体左小腿和左大腿抬升或下落以模拟人体行走时左腿的状态,所述右侧辅助行走组件同时连接在对应侧所述膝关节组件与人体右小腿和右大腿对应的位置,以使得所述右侧辅助行走组件能够驱动人体右小腿和右大腿抬升或下落以模拟人体行走时右腿的状态。
6.在本方案中,以人体坐在轮椅上时的方向作为参考方向,即本方案中的前、后、左、右、上、下分别对应为人体坐在轮椅上时的前、后、左、右、上、下,同时本方案中的轴向为左右方向,竖向为上下方向,纵向为前后方向;且本方案中的坐立状态为人体平时坐在轮椅上
时的轮椅的状态,辅助站立状态为轮椅辅助人体完全站立时的轮椅的状态,坐立状态也为本方案轮椅使用的初始状态,正向转动方向为轮椅由辅助站立状态向坐立状态转换时的转动方向,反向转动方向为轮椅由坐立状态向辅助站立状态转换时的转动方向。
7.本发明的工作原理是:本发明的方案在使用时,用户可以根据自己的需求发出相应的指令,控制器对该用户指令进行判断,以根据不同的用户指令进行发出相应的控制命令;当用户需要轮椅为坐立状态以坐立在轮椅上时,控制器向辅助站立机构发出控制指令,使得辅助站立机构驱动坐板绕轮椅架体竖向顺时针转动到坐立状态,此时用户可以坐立在轮椅上对轮椅进行使用;当用户需要轮椅为辅助站立状态以帮助其站立时,控制器向辅助站立机构发出控制指令,使得辅助站立机构驱动坐板绕轮椅架体逆时针向上转动,坐板带到人体同步向上移动以实现辅助站立的目的;当用户需要进行行走康复训练时,控制器先判断轮椅是否处于辅助站立状态,若不是则控制器需要先将轮椅转换为辅助站立状态,然后控制器再分别向左侧辅助行走组件和右侧辅助行走组件发出控制信号,左侧辅助行走组件和右侧辅助行走组件分别用于驱动人体左腿和右腿抬起和下落,左侧辅助行走组件和右侧辅助行走组件通过模拟人体步态行走时左腿和右腿的运动规律,以此来达到辅助行走的目的,同时,在人体进行辅助行走时,控制器还将通过行走机构控制轮椅在达到设定条件时跟随人体同步行走,如当人体进行的是原地抬腿训练时,此时轮椅保持静止即可,而当人体进行向前行走的康复训练时,此时轮椅在行走机构的作用下跟随人体进行运动,这样就使得在整个康复训练过程中,轮椅与人体之间始终保持合适的距离,由此可以实现长距离的康复训练的目的。
8.综上,本方案在使用时,即可以作为普通的轮椅使用,同时在需要进行下肢康复训练时,辅助站立机构能够辅助人体自主进行站立,而辅助行走机构则可以辅助人体下肢进行抬起或下落以模拟人体行走的状态,进而达到对下肢进行康复训练的目的,同时,本方案整个康复训练过程不需要护理人员的协助,患者全程可以自主完成康复训练的过程,因此本方案能辅助患者自主进行腿部的康复训练,使得患者能根据需要随时随地的进行康复训练,并能大大降低康复成本。
9.优选的,在所述膝关节组件上与人体大腿和小腿对应的位置均设有绑缚组件,所述绑缚组件包括竖向滑动连接的内绑缚件和外绑缚件,所述外绑缚件用于与对应位置的所述膝关节组件连接,所述内绑缚件用于与人体小腿或大腿相接触,且所述外绑缚件和所述内绑缚件均整体呈向前弯曲的弧形结构,以使得所述内绑缚件能够与人体小腿或大腿的后侧进行贴合以形成半包后腿式结构。
10.这样,通过在膝关节组件上与人体大腿和人体小腿对应的位置设置绑缚组件,以利用绑缚组件将膝关节组件穿戴在人体大腿和人体小腿上,同时绑缚组件采用内绑缚件和外绑缚件的结构形式,且两者之间进行竖向滑动连接,使得内绑缚件和外绑缚件之间能够很好的实现相对的上下滑动,从而有效的缓解人体与助行外骨骼的局部不协调而产生的拉扯,同时,绑缚组件的半包后腿式的结构设计能够有效的与人体大腿和小腿贴合以及配合辅助行走机构对人体大小腿的驱动效果。
11.优选的,所述助行外骨骼还包括腰部组件,所述腰部组件与所述髋关节组件转动连接,且在所述髋关节组件上开设有第一安装槽,在所述腰部组件上设有第一连接部,所述第一连接部伸入所述第一安装槽内并通过第一纵向转动件转动连接在所述第一安装槽内,
且所述第一连接部在向轴向两侧转动到设定角度时能够与对应位置所述第一安装槽的槽壁相抵,以对第一连接部的转动进行限位;在所述第一连接部的轴向两侧还分别设有腰部助力弹簧,所述腰部助力弹簧的两端分别连接在对应位置的所述髋关节组件和所述腰部组件上,且所述腰部助力弹簧在初始状态时为自由伸长状态。
12.这样,腰部组件通过第一连接部与髋关节组件进行转动连接,且第一安装槽的设置使得腰部组件具有在轴向方向绕髋关节组件转动的自由度,同时第一安装槽也能对腰部组件的转动角度进行限位,这样使得腰部组件具有一定角度的自由度来适应人体腰部的局部旋转,从而进一步提高助行外骨骼穿戴的灵活性和舒适度;同时腰部助力弹簧的设计能够在人体腰部扭转后为其复位提供助力。
13.一种如上述轮椅和助行外骨骼的一体化结构的控制方法,其特征在于,该控制方法包括以下步骤:步骤1)控制器接收并判断用户指令,当用户指令为辅助坐立时,执行步骤2),当用户指令为辅助起身时,执行步骤3),当用户指令为辅助行走时,执行步骤4);步骤2)控制器通过行走机构控制轮椅停止运行,然后控制器控制辅助站立机构驱动坐板绕轮椅架体正向转动到坐立状态;步骤3)控制器通过行走机构控制轮椅停止运行,然后控制器控制辅助站立机构驱动坐板绕轮椅架体反向转动到辅助站立状态;步骤4)判断轮椅是否处于辅助站立状态,若是则执行步骤5),若否则返回执行步骤3);步骤5)控制器向辅助行走机构发出控制指令,以使得左侧辅助行走组件和右侧辅助行走组件分别通过驱动人体左腿和右腿按固定步态模式进行运动以辅助人体行走,且控制器还将通过行走机构控制轮椅在达到设定条件时跟随人体同步行走;步骤6)判断用户是否退出指令,若否则返回执行步骤1),若是则执行步骤7);步骤7)结束。
14.优选的,所述辅助站立机构包括沿轴向设置的两个站立电动推杆,两个所述站立电动推杆的驱动端分别与对应位置的所述坐板连接;步骤2)中,控制器判断两个站立电动推杆驱动端的伸出距离,当站立电动推杆驱动端的伸出距离大于0时,控制器控制站立电动推杆驱动端的回缩,使得站立电动推杆驱动端的伸出距离减小并带到坐板绕轮椅架体正向转动,直到站立电动推杆驱动端的伸出距离为0,此时坐板转动到坐立状态;步骤3)中,控制器判断两个站立电动推杆驱动端的伸出距离,当站立电动推杆驱动端的伸出距离小于站立设定值时,控制器控制站立电动推杆的驱动端继续伸出,使得站立电动推杆驱动端的伸出距离增大并带到坐板绕轮椅架体反向转动,直到站立电动推杆驱动端的伸出距离增大到站立设定值,此时坐板转动到辅助站立状态;当站立电动推杆驱动端的伸出距离大于站立设定值时,控制器控制站立电动推杆的驱动端回缩,使得站立电动推杆驱动端的伸出距离减小并带到坐板绕轮椅架体正向转动,直到站立电动推杆驱动端的伸出距离减小到站立设定值,此时坐板转动到辅助站立状态。
15.这样,当用户发出辅助坐立的指令时,控制器对两个站立电动推杆驱动端的伸出距离进行判断,当该距离大于0时,说明此时坐板未恢复到坐立状态,故控制器控制站立电
动推杆的驱动端回缩,直到其驱动端的伸出距离为0,此时坐板转动到坐立状态。
16.当用户发出辅助站立的指令时,控制器对两个站立电动推杆驱动端的伸出距离进行判断,当该距离小于站立设定值时,说明此时坐板还为转动到辅助站立状态,控制器控制站立电动推杆的驱动端继续伸出,直到其伸出距离达到站立设定值,此时坐板转动到辅助站立状态,若站立电动推杆驱动端的伸出距离大于站立设定值,说明此时坐板转动的角度过大,控制器控制站立电动推杆的驱动端回缩到站立设定值的距离,由此保证在用户发出辅助站立的指令时,坐板能够处于辅助站立状态,以为人体的站立进行辅助助力。
17.优选的,轮椅和助行外骨骼的一体化结构还包括安装在轮椅上的超声波传感器,所述超声波传感器与所述控制器电连接,所述超声波传感器用于检测人体本身与轮椅之间的距离,并将检测到的数据传递给所述控制器;步骤5)中,当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值时,轮椅保持不动,利用辅助行走机构各组件驱动端长度的伸缩来适应人体本身与轮椅之间的距离变化;当超声波传感器检测到人体本身与轮椅之间的距离在第一设定值和第二设定值之间时,控制器通过行走机构控制轮椅前进并同辅助行走机构各组件驱动端长度的伸缩来共同适应人体本身与轮椅之间的距离变化;当超声波传感器检测到人体本身与轮椅之间的距离大于第二设定值时,控制器通过行走机构控制轮椅前进以减小轮椅与人体本身的距离,直到轮椅与人体本身的距离小于第一设定值。
18.这样,通过设置超声波传感器,利用超声波传感器检测人体本身与轮椅之间的距离,控制器根据该距离的不同来对轮椅和辅助行走机构中各组件驱动端的长度进行调节,当人体本身与轮椅之间的距离小于第一设定值时,说明此时人体本身与轮椅之间的距离变化较小,此时控制器通过辅助行走机构中各组件驱动端的长度变化就可以来适应人体本身与轮椅之间距离的变化;而当人体本身与轮椅之间的距离在第一设定值和第二设定值之间时,此时控制器一方面控制轮椅在行走机构的作用下移动,另一方面也对辅助行走机构中各组件驱动端的长度进行调节,两者共同作用来适应人体本身与轮椅之间的距离变化;而当人体本身与轮椅之间的距离在大于第二设定值时,此时人体本身与轮椅之间的距离较大,主要通过行走机构带到轮椅的移动来适应该距离的变化。综上,本方案在人体本身与轮椅之间的距离较小时,仅仅通过辅助行走机构中各组件驱动端的长度调节就可以适应该距离的变化,而当人体本身与轮椅之间的距离较大时,则主要通过轮椅的移动来适应该距离的变化,当人体本身与轮椅之间的距离位于较大值和较小值之间时,通过轮椅的移动和辅助行走机构中各组件驱动端的长度变化来共同适应该距离的变化,由此就可以更好的来适应人体本身与轮椅之间距离的变化情况。
19.优选的,轮椅和助行外骨骼的一体化结构还包括测距传感器组件,所述测距传感器组件包括用于检测人体左小腿到轮椅距离的左小腿测距传感器、用于检测人体左大腿到轮椅距离的左大腿测距传感器、用于检测人体右小腿到轮椅距离的右小腿测距传感器、以及用于检测人体右大腿到轮椅距离的右大腿测距传感器,所述左小腿测距传感器、左大腿测距传感器、右小腿测距传感器和右大腿测距传感器均与控制器电连接,以分别将检测到的数据传递给所述控制器;步骤5)中,当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值时,轮椅保持不动,控制器根据测距传感器组件中各测距传感器传递的距离数据控制辅助
行走机构中各组件驱动端长度的伸缩来适应人体本身与轮椅之间的距离变化;当超声波传感器检测到人体本身与轮椅之间的距离在第一设设定值和第二设定值之间时,控制器通过行走机构控制轮椅前进,且控制器根据测距传感器组件中各测距传感器传递的距离数据控制辅助行走机构中各组件驱动端长度的伸缩来共同适应人体本身与轮椅之间的距离变化。
20.这样,通过设置测距传感器组件,并利用测距传感器组件中的左小腿测距传感器、左大腿测距传感器、右小腿测距传感器和右大腿测距传感器来分别对人体左小腿、左大腿、右小腿和右大腿到轮椅的距离进行检测,同时控制器根据测距传感器组件中各测距传感器传递的距离数据来分别实现对轮椅和辅助行走机构中各组件驱动端长度的调节,由此就可以更好的来适应人体本身与轮椅之间距离的变化情况。
21.优选的,所述左侧辅助行走组件包括左小腿电动推杆和左大腿电动推杆,所述右侧辅助行走组件包括右小腿电动推杆和右大腿电动推杆,所述左小腿电动推杆和所述右小腿电动推杆的驱动端均倾斜向下设置并与对应位置的膝关节组件连接,所述左大腿电动推杆和所述右大腿电动推杆的驱动端均倾斜向上布置并与对应位置的膝关节组件连接,所述左小腿测距传感器安装在所述左小腿电动推杆上,所述左大腿测距传感器安装在所述左大腿电动推杆上,所述右小腿测距传感器安装在所述右小腿电动推杆上,所述右大腿测距传感器安装在所述右大腿电动推杆上;步骤5)中,当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值或在第一设定值和第二设定值之间时,测距传感器组件中各测距传感器检测人体对应位置到轮椅之间的距离;当测距传感器组件中的测距传感器检测的距离数据大于第三设定值时,控制器控制与该测距传感器对应的电动推杆的驱动端回缩以减小伸出距离;当测距传感器组件中的测距传感器检测的距离数据在第三设定值和第四设定值之间时,控制器控制与该测距传感器对应的电动推杆的伸出距离保持不变;当测距传感器组件中的测距传感器检测的距离数据小于第四设定值时,控制器控制与该测距传感器对应的电动推杆的驱动端伸出以使得伸出距离增大。
22.这样,左小腿电动推杆上的左小腿测距传感器用于检测人体左小腿到轮椅的距离,右小腿电动推杆上的右小腿测距传感器用于检测人体右小腿到轮椅的距离,左大腿电动推杆上的左大腿测距传感器用于检测人体左大腿到轮椅的距离,左大腿电动推杆上的左大腿测距传感器用于检测人体左大腿到轮椅的距离;当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值或在第一设定值和第二设定值之间时,此时再进一步通过测距传感器组件中各测距传感器检测到的人体对应位置到轮椅之间的距离来实现对各电动推杆伸出距离的进一步控制,当测距传感器组件中的一个或多个测距传感器检测的距离数据大于第三设定值时,控制器控制与上述测距传感器对应位置的电动推杆的驱动端回缩以减小伸出距离,当测距传感器组件中的一个或多个测距传感器检测的距离数据在第三设定值和第四设定值之间时,控制器控制与上述测距传感器对应位置的电动推杆的伸出距离保持不变,当测距传感器组件中的一个或多个测距传感器检测的距离数据小于第四设定值之间时,控制器控制与上述测距传感器对应位置的电动推杆的伸出距离增大,这样就通过对各电动推杆伸出距离的调整,使得人体各个位置与轮椅之间的距离保持在合适的范围内。
23.优选的,步骤5)中的固定步态模式为:当控制器向辅助行走机构发出控制指令时,控制器先向右侧辅助行走组件发出控制指令时,右小腿电动推杆和右大腿电动推杆的驱动
端伸出,以分别驱动人体右小腿和右大腿向上抬升呈摆动相状态,当右小腿电动推杆和右大腿电动推杆的驱动端伸出距离达到抬升设定值时,右小腿电动推杆和右大腿电动推杆的驱动端回缩使其伸出距离减小,此时右小腿电动推杆和右大腿电动推杆驱动人体右小腿和右大腿下落,直到右小腿电动推杆和右大腿电动推杆的伸出距离减小到0,此时人体右腿下落至地面处于支撑相状态;然后控制器再向左侧辅助行走组件发出控制指令,左小腿电动推杆和左大腿电动推杆的驱动端伸出,以分别驱动人体左小腿和左大腿向上抬升呈摆动相状态,当左小腿电动推杆和左大腿电动推杆的驱动端伸出距离达到抬升设定值时,左小腿电动推杆和左大腿电动推杆的驱动端回缩使其伸出距离减小,此时左小腿电动推杆和左大腿电动推杆驱动人体左小腿和左大腿下落,直到左小腿电动推杆和左大腿电动推杆的伸出距离减小到0,此时人体左腿下落至地面处于支撑相状态,控制器通过对右侧辅助行走组件和左侧辅助行走组件的往复驱动,使得人体右腿和左腿在摆动相和支撑相状态往复转换,以此模拟人体的步态行走。
24.这样,当在进行辅助行走时,控制器可以先控制人体右脚运动(具体使用时,也可以是先控制人体左脚先运动),当控制器先控制人体右脚运动时,右小腿电动推杆和右大腿电动推杆的驱动端先伸出以使得人体右腿整体抬起呈摆动相状态,然后右小腿电动推杆和右大腿电动推杆的驱动端回缩以使得人体右腿下落到支撑相状态,然后控制器再控制人体左脚运动,左小腿电动推杆和左大腿电动推杆的驱动端先伸出以使得人体左腿整体抬起呈摆动相状态,然后左小腿电动推杆和左大腿电动推杆的驱动端回缩以使得人体左腿下落到支撑相状态,如此控制器按上述过程对人体右腿和左腿进行往复驱动控制,以此来模拟人体的步态行走,完成辅助行走的目的。
25.优选的,步骤5)中,当控制器向辅助行走机构发出控制指令时,控制器先控制右大腿电动推杆的驱动端伸出距离达到第一抬升设定值,然后控制器再控制右小腿电动推杆的驱动端伸出距离达到第二抬升设定值,当右大腿电动推杆的驱动端伸出距离达到第一抬升设定值并保持第一设定时间后,控制器控制右大腿电动推杆和右小腿电动推杆的驱动端回缩,直到人体右腿下落至地面处于支撑相状态;然后控制器控制左大腿电动推杆的驱动端伸出距离达到第一抬升设定值后,控制器再控制左小腿电动推杆的驱动端伸出距离达到第二抬升设定值,当左大腿电动推杆的驱动端伸出距离达到第一抬升设定值并保持第一设定时间后,控制器控制左大腿电动推杆和左小腿电动推杆的驱动端回缩,直到人体左腿下落至地面处于支撑相状态;如此往复,控制器使得人体右腿和左腿在摆动相和支撑相状态往复转换,以此模拟人体的步态行走。
26.这样,控制器在控制人体进行辅助行走时,先控制右大腿电动推杆的驱动端伸出到第一抬升设定值,然后再控制右小腿电动推杆的驱动端伸出到第二抬升设定值,当右大腿电动推杆的驱动端伸出距离达到第一抬升设定值并保持第一设定时间后,控制器控制右大腿电动推杆和右小腿电动推杆的驱动端回缩,直到人体右腿下落至地面处于支撑相状态,控制器对人体右腿的控制过程符合人体行走时右腿的运动趋势;然后控制器再按照上述规律控制人体左腿的运动,如此往复,控制器通过控制人体左腿和右腿在摆动相和支撑相状态下不断转换,由此就可以达到模拟人体步态行走的目的,进而达到辅助人体进行康复运动的目的。
附图说明
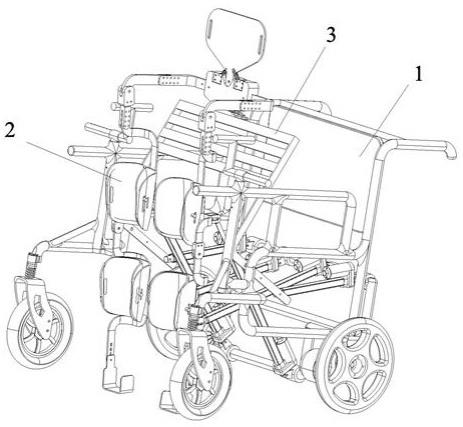
27.图1为本发明轮椅和助行外骨骼的一体化结构的结构示意图;图2为本发明轮椅和助行外骨骼的一体化结构中轮椅其中一个视角的结构示意图;图3为本发明轮椅和助行外骨骼的一体化结构中轮椅另一个视角的结构示意图;图4为本发明轮椅和助行外骨骼的一体化结构中助行外骨骼其中一个视角的结构示意图;图5为本发明轮椅和助行外骨骼的一体化结构中助行外骨骼的正视图;图6为本发明轮椅和助行外骨骼的一体化结构的控制方法的流程图。
28.附图标记说明:轮椅架体1、助行外骨骼2、腰部组件201、第一连接部2011、髋部调节板202、髋部第二连接孔2021、髋部第一连接孔2022、髋部连接件203、中间连接板204、转动连接部2041、调节连接部2042、大腿连接孔2043、大腿杆205、小腿杆206、小腿条形连接孔2061、踝关节组件207、外绑缚件208、内绑缚件209、髋部安装板210、腰部助力弹簧211、合页212、坐板3、站立电动推杆4、纵向扶手5、竖向扶手6、驱动轮7、从动轮8、左小腿电动推杆9、左大腿电动推杆10、右小腿电动推杆11、右大腿电动推杆12。
具体实施方式
29.下面将结合附图及实施例对本发明作进一步说明。
30.如附图1到附图5所示,一种轮椅和助行外骨骼的一体化结构,包括轮椅和助行外骨骼2,轮椅包括轮椅架体1、坐板3和行走机构,助行外骨骼2包括髋关节组件、膝关节组件和踝关节组件,髋关节组件与对应位置的坐板3转动连接,轮椅架体1上设有控制器、以及与控制器电连接的辅助站立机构和辅助行走机构,行走机构与控制器电连接,辅助站立机构与坐板3连接,辅助站立机构能够驱动坐板3绕轮椅架体1竖向转动,以辅助人体进行站立,辅助行走机构包括左侧辅助行走组件和右侧辅助行走组件,左侧辅助行走组件同时连接在对应侧膝关节组件与人体左小腿和左大腿对应的位置,以使得左侧辅助行走组件能够驱动人体左小腿和左大腿抬升或下落以模拟人体行走时左腿的状态,右侧辅助行走组件同时连接在对应侧膝关节组件与人体右小腿和右大腿对应的位置,以使得右侧辅助行走组件能够驱动人体右小腿和右大腿抬升或下落以模拟人体行走时右腿的状态。
31.在本方案中,以人体坐在轮椅上时的方向作为参考方向,即本方案中的前、后、左、右、上、下分别对应为人体坐在轮椅上时的前、后、左、右、上、下,同时本方案中的轴向为左右方向,竖向为上下方向,纵向为前后方向;且本方案中的坐立状态为人体平时坐在轮椅上时的轮椅的状态,辅助站立状态为轮椅辅助人体完全站立时的轮椅的状态,坐立状态也为本方案轮椅使用的初始状态,正向转动方向为轮椅由辅助站立状态向坐立状态转换时的转动方向,反向转动方向为轮椅由坐立状态向辅助站立状态转换时的转动方向。
32.本发明的工作原理是:本发明的方案在使用时,用户可以根据自己的需求发出相应的指令,控制器对该用户指令进行判断,以根据不同的用户指令进行发出相应的控制命令;当用户需要轮椅为坐立状态以坐立在轮椅上时,控制器向辅助站立机构发出控制指令,使得辅助站立机构驱动坐板3绕轮椅架体1竖向顺时针转动到坐立状态,此时用户可以坐立在轮椅上对轮椅进行使用;当用户需要轮椅为辅助站立状态以帮助其站立时,控制器向辅
助站立机构发出控制指令,使得辅助站立机构驱动坐板3绕轮椅架体1逆时针向上转动,坐板3带到人体同步向上移动以实现辅助站立的目的;当用户需要进行行走康复训练时,控制器先判断轮椅是否处于辅助站立状态,若不是则控制器需要先将轮椅转换为辅助站立状态,然后控制器再分别向左侧辅助行走组件和右侧辅助行走组件发出控制信号,左侧辅助行走组件和右侧辅助行走组件分别用于驱动人体左腿和右腿抬起和下落,左侧辅助行走组件和右侧辅助行走组件通过模拟人体步态行走时左腿和右腿的运动规律,以此来达到辅助行走的目的,同时,在人体进行辅助行走时,控制器还将通过行走机构控制轮椅在达到设定条件时跟随人体同步行走,如当人体进行的是原地抬腿训练时,此时轮椅保持静止即可,而当人体进行向前行走的康复训练时,此时轮椅在行走机构的作用下跟随人体进行运动,这样就使得在整个康复训练过程中,轮椅与人体之间始终保持合适的距离,由此可以实现长距离的康复训练的目的。
33.综上,本方案在使用时,即可以作为普通的轮椅使用,同时在需要进行下肢康复训练时,辅助站立机构能够辅助人体自主进行站立,而辅助行走机构则可以辅助人体下肢进行抬起或下落以模拟人体行走的状态,进而达到对下肢进行康复训练的目的,同时,本方案整个康复训练过程不需要护理人员的协助,患者全程可以自主完成康复训练的过程,因此本方案能辅助患者自主进行腿部的康复训练,使得患者能根据需要随时随地的进行康复训练,并能大大降低康复成本。
34.在本实施例中,轮椅架体1上还设有行走驱动机构,行走机构包括沿轮椅纵向方向布置的驱动轮7和从动轮8,且驱动轮7位于轮椅纵向方向的后侧,行走驱动机构与驱动轮7连接,以驱动驱动轮7旋转。
35.这样,行走驱动机构通过带动驱动轮7的旋转来实现轮椅移动的效果,一方面当人体坐在轮椅上时,通过轮椅的移动来达到辅助人体行走的目的,另一方面当进行行走康复训练时,辅助行走机构作用在人体大腿和小腿来模拟人体行走时的状态,此时行走驱动机构通过驱动轮7来带动轮椅整体跟随人体的行走,由此在整个康复训练过程中,轮椅将跟随人体康复训练时的行走进程,由此可以实现长距离的康复训练的目的。
36.在本实施例中,轮椅架体1的轴向两侧还对称设有扶手组件,扶手组件包括沿纵向设置的纵向扶手5和沿竖向设置的竖向扶手6,纵向扶手5用于在坐姿状态和辅助行走状态时对人体手部进行支撑,竖向扶手6用于在辅助行走状态时支撑在人体腋下以对人体进行支撑。
37.这样,通过设置纵向扶手5和竖向扶手6,双扶手的设计可以更好的方便使用者在坐姿状态和站立行走状态时的使用,当使用者为坐姿状态时,纵向扶手5可用于对使用者的手部进行支撑,而当使用者在进行行走康复训练时,竖向扶手6可以支撑在人体腋下以对人体进行支撑,同时使用者的手部位置还可以放置在纵向扶手5上进行进一步的支撑,由此提高设备使用的安全性以及为使用者提供更好的支撑效果。
38.在本实施例中,在轮椅架体1上用于连接竖向扶手6的位置设有安装套管,在安装套管上开设有沿轴向贯穿安装套管的扶手连接孔,在竖向扶手6上沿其长度方向开设有多个沿轴向贯穿竖向扶手6的扶手安装孔,竖向扶手6的下端滑动连接在安装套管内,以使得扶手连接孔与不同位置的扶手安装孔相对应,且扶手连接孔和对应位置的扶手安装孔之间通过扶手紧固件进行固定连接。
39.这样,当不同使用者需要使用该竖向扶手6时,通过调节竖向扶手6的高度,使得竖向扶手6上不同位置的扶手安装孔与安装套管上的扶手连接孔进行对应,然后当调整到需要的高度时,再通过扶手紧固件将扶手连接孔与对应位置的扶手安装孔之间进行连接即可,因此本方案的竖向扶手6能通过高度的调节来满足不同使用者的使用需求,提高使用的舒适性。
40.如附图4和附图5所示,在本实施例中,在膝关节组件上与人体大腿和小腿对应的位置均设有绑缚组件,绑缚组件包括竖向滑动连接的内绑缚件209和外绑缚件208,外绑缚件208用于与对应位置的膝关节组件连接,内绑缚件209用于与人体小腿或大腿相接触,且外绑缚件208和内绑缚件209均整体呈向前弯曲的弧形结构,以使得内绑缚件209能够与人体小腿或大腿的后侧进行贴合以形成半包后腿式结构。
41.这样,通过在膝关节组件上与人体大腿和人体小腿对应的位置设置绑缚组件,以利用绑缚组件将膝关节组件穿戴在人体大腿和人体小腿上,同时绑缚组件采用内绑缚件209和外绑缚件208的结构形式,且两者之间进行竖向滑动连接,使得内绑缚件209和外绑缚件208之间能够很好的实现相对的上下滑动,从而有效的缓解人体与助行外骨骼2的局部不协调而产生的拉扯,同时,绑缚组件的半包后腿式的结构设计能够有效的与人体大腿和小腿贴合以及配合辅助行走机构对人体大小腿的驱动效果。
42.在本实施例中,助行外骨骼2还包括腰部组件201,腰部组件201与髋关节组件转动连接,且在髋关节组件上开设有第一安装槽,在腰部组件201上设有第一连接部2011,第一连接部2011伸入第一安装槽内并通过第一纵向转动件转动连接在第一安装槽内,且第一连接部2011在向轴向两侧转动到设定角度时能够与对应位置第一安装槽的槽壁相抵,以对第一连接部2011的转动进行限位;在第一连接部2011的轴向两侧还分别设有腰部助力弹簧211,腰部助力弹簧211的两端分别连接在对应位置的髋关节组件和腰部组件201上,且腰部助力弹簧211在初始状态时为自由伸长状态。
43.这样,腰部组件201通过第一连接部2011与髋关节组件进行转动连接,且第一安装槽的设置使得腰部组件201具有在轴向方向绕髋关节组件转动的自由度,同时第一安装槽也能对腰部组件201的转动角度进行限位,这样使得腰部组件201具有一定角度的自由度来适应人体腰部的局部旋转,从而进一步提高助行外骨骼2穿戴的灵活性和舒适度;同时腰部助力弹簧211的设计能够在人体腰部扭转后为其复位提供助力。
44.在本实施例中,膝关节组件包括大腿杆205和小腿杆206,大腿杆205和小腿杆206之间通过第一轴向转动件转动连接,以与人体膝关节的前屈和后伸运动相适应,小腿杆206远离其连接大腿杆205的一端与踝关节组件207连接,在小腿杆206与踝关节组件207连接的一端沿其长度方向开设有多个小腿条形连接孔2061,在踝关节组件207上开设有小腿安装孔,小腿安装孔能够与不同位置的小腿条形连接孔2061对应,且小腿安装孔与对应位置的小腿条形连接孔2061通过小腿紧固件进行竖向滑动连接。
45.这样,大腿杆205和小腿杆206之间通过第一轴向转动件转动连接以适应人体膝关节的前屈和后伸运动,同时小腿杆206和踝关节组件207通过小腿条形连接孔2061和小腿安装孔进行连接,一方面当小腿安装孔与不同位置的小腿条形连接孔2061对应时,可以适应不同人体的小腿长度,另一方面,小腿杆206与踝关节组件207通过小腿紧固件进行竖向滑动连接,可以更换的适应人体踝关节之间的拉扯变化,从而进一步提高该助行外骨骼2穿戴
的舒适性。
46.在本实施例中,所髋关节组件包括髋部安装板210,在髋部安装板210的轴向两侧对称开始有髋部调节板202,髋部调节板202整体呈l型结构,且在髋部调节板202用于与髋部安装板210连接的一端沿轴向方向开设有多个髋部第一连接孔2022,在髋部安装板210轴向两侧对称开设有髋部第一安装孔,髋部第一安装孔能够与对应侧不同位置的髋部第一连接孔2022对应,且髋部第一安装孔和髋部第一连接孔2022通过髋部第一紧固件进行紧固连接;在髋部调节板202远离其连接髋部安装板210的一端还连接有髋部连接件203,髋部调节板202用于与髋部连接件203连接的一端沿纵向方向开设有多个髋部第二连接孔2021,髋部连接件203用于与髋部调节板202连接的一端开设有髋部第二安装孔,髋部第二安装孔能够与不同位置的髋部第二连接孔2021相对应,且髋部第二安装孔和对应位置的髋部第二连接孔2021通过髋部第二紧固件进行紧固连接;髋部连接件203远离其连接髋部调节板202的一端还连接有中间连接板204,中间连接板204包括转动连接部2041和调节连接部2042,髋部连接件203与转动连接部2041之间通过第二轴向转动件进行转动连接,以与人体髋关节的前屈和后伸运动相适应,在调节连接部2042上沿竖向方向开设有多个大腿连接孔2043,在大腿杆205靠近调节连接部2042的一端开设有大腿安装孔,大腿安装孔能够与不同位置的大腿连接孔2043相对应,且大腿安装孔与对应位置的大腿连接孔2043通过大腿紧固件进行紧固连接。
47.这样,当不同的使用者穿戴该助行外骨骼2时,可以对髋关节组件中各零件的相对位置进行调节,以与不同使用者的对应位置的尺寸相适应,依次来进一步提高穿戴的舒适性。
48.当需要调节髋部安装板210和髋部调节板202之间的位置尺寸时,将髋部第一安装孔与不同位置的髋部第一连接孔2022进行对应,然后再通过髋部第一紧固件实现髋部调节板202和髋部安装板210之间的连接,由此实现髋部安装板210和髋部调节板202之间位置尺寸的调节。
49.当需要调节髋部调节板202和髋部连接件203之间的位置尺寸时,将髋部第二安装孔与不同位置的髋部第二连接孔2021相对应,然后再通过髋部第二紧固件实现髋部调节板202和髋部连接件203之间的连接,由此实现髋部调节板202和髋部连接件203之间位置尺寸的调节。
50.髋部连接件203与转动连接部2041通过第二轴向转动件进行转动连接,可以与人体髋关节的前屈和后伸运动相适应,当需要调节调节连接部2042和大腿杆205之间的位置尺寸时,将大腿安装孔与不同位置的大腿连接孔2043相对于,然后再通过大腿紧固件实现调节连接部2042和大腿杆205之间的连接,由此实现调节连接部2042和大腿杆205之间位置尺寸的调节效果。
51.如附图6所示,一种如上述轮椅和助行外骨骼的一体化结构的控制方法,包括以下步骤:步骤1)控制器接收并判断用户指令,当用户指令为辅助坐立时,执行步骤2),当用户指令为辅助起身时,执行步骤3),当用户指令为辅助行走时,执行步骤4);步骤2)控制器通过行走机构控制轮椅停止运行,然后控制器控制辅助站立机构驱
动坐板3绕轮椅架体1正向转动到坐立状态;步骤3)控制器通过行走机构控制轮椅停止运行,然后控制器控制辅助站立机构驱动坐板3绕轮椅架体1反向转动到辅助站立状态;步骤4)判断轮椅是否处于辅助站立状态,若是则执行步骤5),若否则返回执行步骤3);步骤5)控制器向辅助行走机构发出控制指令,以使得左侧辅助行走组件和右侧辅助行走组件分别通过驱动人体左腿和右腿按固定步态模式进行运动以辅助人体行走,且控制器还将通过行走机构控制轮椅在达到设定条件时跟随人体同步行走;步骤6)判断用户是否退出指令,若否则返回执行步骤1),若是则执行步骤7);步骤7)结束。
52.在本实施例中,辅助站立机构包括沿轴向设置的两个站立电动推杆4,两个站立电动推杆4的驱动端分别与对应位置的坐板3连接;步骤2)中,控制器判断两个站立电动推杆4驱动端的伸出距离,当站立电动推杆4驱动端的伸出距离大于0时,控制器控制站立电动推杆4驱动端的回缩,使得站立电动推杆4驱动端的伸出距离减小并带到坐板3绕轮椅架体1正向转动,直到站立电动推杆4驱动端的伸出距离为0,此时坐板3转动到坐立状态;步骤3)中,控制器判断两个站立电动推杆4驱动端的伸出距离,当站立电动推杆4驱动端的伸出距离小于站立设定值时,控制器控制站立电动推杆4的驱动端继续伸出,使得站立电动推杆4驱动端的伸出距离增大并带到坐板3绕轮椅架体1反向转动,直到站立电动推杆4驱动端的伸出距离增大到站立设定值,此时坐板3转动到辅助站立状态;当站立电动推杆4驱动端的伸出距离大于站立设定值时,控制器控制站立电动推杆4的驱动端回缩,使得站立电动推杆4驱动端的伸出距离减小并带到坐板3绕轮椅架体1正向转动,直到站立电动推杆4驱动端的伸出距离减小到站立设定值,此时坐板3转动到辅助站立状态。
53.这样,当用户发出辅助坐立的指令时,控制器对两个站立电动推杆4驱动端的伸出距离进行判断,当该距离大于0时,说明此时坐板3未恢复到坐立状态,故控制器控制站立电动推杆4的驱动端回缩,直到其驱动端的伸出距离为0,此时坐板3转动到坐立状态。
54.当用户发出辅助站立的指令时,控制器对两个站立电动推杆4驱动端的伸出距离进行判断,当该距离小于站立设定值时,说明此时坐板3还为转动到辅助站立状态,控制器控制站立电动推杆4的驱动端继续伸出,直到其伸出距离达到站立设定值,此时坐板3转动到辅助站立状态,若站立电动推杆4驱动端的伸出距离大于站立设定值,说明此时坐板3转动的角度过大,控制器控制站立电动推杆4的驱动端回缩到站立设定值的距离,由此保证在用户发出辅助站立的指令时,坐板3能够处于辅助站立状态,以为人体的站立进行辅助助力。
55.在本实施例中,轮椅和助行外骨骼的一体化结构还包括安装在轮椅上的超声波传感器,超声波传感器与控制器电连接,超声波传感器用于检测人体本身与轮椅之间的距离,并将检测到的数据传递给控制器;步骤5)中,当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值时,轮椅保持不动,利用辅助行走机构各组件驱动端长度的伸缩来适应人体本身与轮椅之间的距离变化;当超声波传感器检测到人体本身与轮椅之间的距离在第一设定值和第二设
定值之间时,控制器通过行走机构控制轮椅前进并同辅助行走机构各组件驱动端长度的伸缩来共同适应人体本身与轮椅之间的距离变化;当超声波传感器检测到人体本身与轮椅之间的距离大于第二设定值时,控制器通过行走机构控制轮椅前进以减小轮椅与人体本身的距离,直到轮椅与人体本身的距离小于第一设定值。
56.这样,通过设置超声波传感器,利用超声波传感器检测人体本身与轮椅之间的距离,控制器根据该距离的不同来对轮椅和辅助行走机构中各组件驱动端的长度进行调节,当人体本身与轮椅之间的距离小于第一设定值时,说明此时人体本身与轮椅之间的距离变化较小,此时控制器通过辅助行走机构中各组件驱动端的长度变化就可以来适应人体本身与轮椅之间距离的变化;而当人体本身与轮椅之间的距离在第一设定值和第二设定值之间时,此时控制器一方面控制轮椅在行走机构的作用下移动,另一方面也对辅助行走机构中各组件驱动端的长度进行调节,两者共同作用来适应人体本身与轮椅之间的距离变化;而当人体本身与轮椅之间的距离在大于第二设定值时,此时人体本身与轮椅之间的距离较大,主要通过行走机构带到轮椅的移动来适应该距离的变化。综上,本方案在人体本身与轮椅之间的距离较小时,仅仅通过辅助行走机构中各组件驱动端的长度调节就可以适应该距离的变化,而当人体本身与轮椅之间的距离较大时,则主要通过轮椅的移动来适应该距离的变化,当人体本身与轮椅之间的距离位于较大值和较小值之间时,通过轮椅的移动和辅助行走机构中各组件驱动端的长度变化来共同适应该距离的变化,由此就可以更好的来适应人体本身与轮椅之间距离的变化情况。
57.在本实施例中,轮椅和助行外骨骼的一体化结构还包括测距传感器组件,测距传感器组件包括用于检测人体左小腿到轮椅距离的左小腿测距传感器、用于检测人体左大腿到轮椅距离的左大腿测距传感器、用于检测人体右小腿到轮椅距离的右小腿测距传感器、以及用于检测人体右大腿到轮椅距离的右大腿测距传感器,左小腿测距传感器、左大腿测距传感器、右小腿测距传感器和右大腿测距传感器均与控制器电连接,以分别将检测到的数据传递给控制器;在本实施例中,测距传感器组件中的各测距传感器均采用激光测距传感器;步骤5)中,当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值时,轮椅保持不动,控制器根据测距传感器组件中各测距传感器传递的距离数据控制辅助行走机构中各组件驱动端长度的伸缩来适应人体本身与轮椅之间的距离变化;当超声波传感器检测到人体本身与轮椅之间的距离在第一设设定值和第二设定值之间时,控制器通过行走机构控制轮椅前进,且控制器根据测距传感器组件中各测距传感器传递的距离数据控制辅助行走机构中各组件驱动端长度的伸缩来共同适应人体本身与轮椅之间的距离变化。
58.这样,通过设置测距传感器组件,并利用测距传感器组件中的左小腿测距传感器、左大腿测距传感器、右小腿测距传感器和右大腿测距传感器来分别对人体左小腿、左大腿、右小腿和右大腿到轮椅的距离进行检测,同时控制器根据测距传感器组件中各测距传感器传递的距离数据来分别实现对轮椅和辅助行走机构中各组件驱动端长度的调节,由此就可以更好的来适应人体本身与轮椅之间距离的变化情况。
59.在本实施例中,左侧辅助行走组件包括左小腿电动推杆9和左大腿电动推杆10,右侧辅助行走组件包括右小腿电动推杆11和右大腿电动推杆12,左小腿电动推杆9和右小腿电动推杆11的驱动端均倾斜向下设置并与对应位置的膝关节组件连接,左大腿电动推杆10
和右大腿电动推杆12的驱动端均倾斜向上布置并与对应位置的膝关节组件连接,左小腿测距传感器安装在左小腿电动推杆9上,左大腿测距传感器安装在左大腿电动推杆10上,右小腿测距传感器安装在右小腿电动推杆11上,右大腿测距传感器安装在右大腿电动推杆12上;各测距传感器在各电动推杆上安装的位置为距人体对应位置30cm的地方;步骤5)中,当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值或在第一设定值和第二设定值之间时,测距传感器组件中各测距传感器检测人体对应位置到轮椅之间的距离;当测距传感器组件中的测距传感器检测的距离数据大于第三设定值时,控制器控制与该测距传感器对应的电动推杆的驱动端回缩以减小伸出距离;当测距传感器组件中的测距传感器检测的距离数据在第三设定值和第四设定值之间时,控制器控制与该测距传感器对应的电动推杆的伸出距离保持不变;当测距传感器组件中的测距传感器检测的距离数据小于第四设定值时,控制器控制与该测距传感器对应的电动推杆的驱动端伸出以使得伸出距离增大。
60.这样,左小腿电动推杆9上的左小腿测距传感器用于检测人体左小腿到轮椅的距离,右小腿电动推杆11上的右小腿测距传感器用于检测人体右小腿到轮椅的距离,左大腿电动推杆10上的左大腿测距传感器用于检测人体左大腿到轮椅的距离,左大腿电动推杆10上的左大腿测距传感器用于检测人体左大腿到轮椅的距离;当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值或在第一设定值和第二设定值之间时,此时再进一步通过测距传感器组件中各测距传感器检测到的人体对应位置到轮椅之间的距离来实现对各电动推杆伸出距离的进一步控制,当测距传感器组件中的一个或多个测距传感器检测的距离数据大于第三设定值时,控制器控制与上述测距传感器对应位置的电动推杆的驱动端回缩以减小伸出距离,当测距传感器组件中的一个或多个测距传感器检测的距离数据在第三设定值和第四设定值之间时,控制器控制与上述测距传感器对应位置的电动推杆的伸出距离保持不变,当测距传感器组件中的一个或多个测距传感器检测的距离数据小于第四设定值之间时,控制器控制与上述测距传感器对应位置的电动推杆的伸出距离增大,这样就通过对各电动推杆伸出距离的调整,使得人体各个位置与轮椅之间的距离保持在合适的范围内。
61.在本实施例中,步骤5)中的固定步态模式为:当控制器向辅助行走机构发出控制指令时,控制器先向右侧辅助行走组件发出控制指令时,右小腿电动推杆11和右大腿电动推杆12的驱动端伸出,以分别驱动人体右小腿和右大腿向上抬升呈摆动相状态,当右小腿电动推杆11和右大腿电动推杆12的驱动端伸出距离达到抬升设定值时,右小腿电动推杆11和右大腿电动推杆12的驱动端回缩使其伸出距离减小,此时右小腿电动推杆11和右大腿电动推杆12驱动人体右小腿和右大腿下落,直到右小腿电动推杆11和右大腿电动推杆12的伸出距离减小到0,此时人体右腿下落至地面处于支撑相状态;然后控制器再向左侧辅助行走组件发出控制指令,左小腿电动推杆9和左大腿电动推杆10的驱动端伸出,以分别驱动人体左小腿和左大腿向上抬升呈摆动相状态,当左小腿电动推杆9和左大腿电动推杆10的驱动端伸出距离达到抬升设定值时,左小腿电动推杆9和左大腿电动推杆10的驱动端回缩使其伸出距离减小,此时左小腿电动推杆9和左大腿电动推杆10驱动人体左小腿和左大腿下落,直到左小腿电动推杆9和左大腿电动推杆10的伸出距离减小到0,此时人体左腿下落至地面处于支撑相状态,控制器通过对右侧辅助行走组件和左侧辅助行走组件的往复驱动,使得
人体右腿和左腿在摆动相和支撑相状态往复转换,以此模拟人体的步态行走。
62.这样,当在进行辅助行走时,控制器可以先控制人体右脚运动(具体使用时,也可以是先控制人体左脚先运动),当控制器先控制人体右脚运动时,右小腿电动推杆11和右大腿电动推杆12的驱动端先伸出以使得人体右腿整体抬起呈摆动相状态,然后右小腿电动推杆11和右大腿电动推杆12的驱动端回缩以使得人体右腿下落到支撑相状态,然后控制器再控制人体左脚运动,左小腿电动推杆9和左大腿电动推杆10的驱动端先伸出以使得人体左腿整体抬起呈摆动相状态,然后左小腿电动推杆9和左大腿电动推杆10的驱动端回缩以使得人体左腿下落到支撑相状态,如此控制器按上述过程对人体右腿和左腿进行往复驱动控制,以此来模拟人体的步态行走,完成辅助行走的目的。
63.在本实施例中,步骤5)中,当控制器向辅助行走机构发出控制指令时,控制器先控制右大腿电动推杆12的驱动端伸出距离达到第一抬升设定值,然后控制器再控制右小腿电动推杆11的驱动端伸出距离达到第二抬升设定值,当右大腿电动推杆12的驱动端伸出距离达到第一抬升设定值并保持第一设定时间后,控制器控制右大腿电动推杆12和右小腿电动推杆11的驱动端回缩,直到人体右腿下落至地面处于支撑相状态;然后控制器控制左大腿电动推杆10的驱动端伸出距离达到第一抬升设定值后,控制器再控制左小腿电动推杆9的驱动端伸出距离达到第二抬升设定值,当左大腿电动推杆10的驱动端伸出距离达到第一抬升设定值并保持第一设定时间后,控制器控制左大腿电动推杆10和左小腿电动推杆9的驱动端回缩,直到人体左腿下落至地面处于支撑相状态;如此往复,控制器使得人体右腿和左腿在摆动相和支撑相状态往复转换,以此模拟人体的步态行走。
64.这样,控制器在控制人体进行辅助行走时,先控制右大腿电动推杆12的驱动端伸出到第一抬升设定值,然后再控制右小腿电动推杆11的驱动端伸出到第二抬升设定值,当右大腿电动推杆12的驱动端伸出距离达到第一抬升设定值并保持第一设定时间后,控制器控制右大腿电动推杆12和右小腿电动推杆11的驱动端回缩,直到人体右腿下落至地面处于支撑相状态,控制器对人体右腿的控制过程符合人体行走时右腿的运动趋势;然后控制器再按照上述规律控制人体左腿的运动,如此往复,控制器通过控制人体左腿和右腿在摆动相和支撑相状态下不断转换,由此就可以达到模拟人体步态行走的目的,进而达到辅助人体进行康复运动的目的。
65.在本实施例中,第一设定值为0.9m,第二设定值为1.2m,第三设定值为0.6m,第四设定值为0.3m,第一抬升设定值为35mm,第二抬升设定值为90mm,第一设定时间为7ms。
66.本发明的轮椅和助行外骨骼的一体化结构的控制方法完整的控制流程包括以下步骤:步骤1)控制器接收并判断用户指令,当用户指令为辅助坐立时,执行步骤2),当用户指令为辅助起身时,执行步骤3),当用户指令为辅助行走时,执行步骤4);步骤2控制器通过行走机构控制轮椅停止运行,然后控制器控制辅助站立机构驱动坐板3绕轮椅架体1正向转动,控制器判断两个站立电动推杆4驱动端的伸出距离,当站立电动推杆4驱动端的伸出距离大于0时,控制器控制站立电动推杆4驱动端的回缩,使得站立电动推杆4驱动端的伸出距离减小并带到坐板3绕轮椅架体1正向转动,直到站立电动推杆4驱动端的伸出距离为0,此时坐板3转动到坐立状态;步骤3)控制器通过行走机构控制轮椅停止运行,然后控制器控制辅助站立机构驱
动坐板3绕轮椅架体1反向转动,控制器判断两个站立电动推杆4驱动端的伸出距离,当站立电动推杆4驱动端的伸出距离小于站立设定值时,控制器控制站立电动推杆4的驱动端继续伸出,使得站立电动推杆4驱动端的伸出距离增大并带到坐板3绕轮椅架体1反向转动,直到站立电动推杆4驱动端的伸出距离增大到站立设定值,此时坐板3转动到辅助站立状态;当站立电动推杆4驱动端的伸出距离大于站立设定值时,控制器控制站立电动推杆4的驱动端回缩,使得站立电动推杆4驱动端的伸出距离减小并带到坐板3绕轮椅架体1正向转动,直到站立电动推杆4驱动端的伸出距离减小到站立设定值,此时坐板3转动到辅助站立状态;步骤4)判断轮椅是否处于辅助站立状态,若是则执行步骤5),若否则返回执行步骤3);步骤5)控制器向辅助行走机构发出控制指令,以使得左侧辅助行走组件和右侧辅助行走组件分别通过驱动人体左腿和右腿按固定步态模式进行运动以辅助人体行走,且控制器还将通过行走机构控制轮椅在达到设定条件时跟随人体同步行走;当超声波传感器检测到人体本身与轮椅之间的距离小于第一设定值时,轮椅保持不动,控制器根据测距传感器组件中各测距传感器传递的距离数据控制辅助行走机构中各组件驱动端长度的伸缩来适应人体本身与轮椅之间的距离变化;当超声波传感器检测到人体本身与轮椅之间的距离在第一设设定值和第二设定值之间时,控制器通过行走机构控制轮椅前进,且控制器根据测距传感器组件中各测距传感器传递的距离数据控制辅助行走机构中各组件驱动端长度的伸缩来共同适应人体本身与轮椅之间的距离变化;当测距传感器组件中的测距传感器检测的距离数据大于第三设定值时,控制器控制与该测距传感器对应的电动推杆的驱动端回缩以减小伸出距离;当测距传感器组件中的测距传感器检测的距离数据在第三设定值和第四设定值之间时,控制器控制与该测距传感器对应的电动推杆的伸出距离保持不变;当测距传感器组件中的测距传感器检测的距离数据小于第四设定值时,控制器控制与该测距传感器对应的电动推杆的驱动端伸出以使得伸出距离增大;固定步态模式为:当控制器向辅助行走机构发出控制指令时,控制器先向右侧辅助行走组件发出控制指令时,右小腿电动推杆11和右大腿电动推杆12的驱动端伸出,以分别驱动人体右小腿和右大腿向上抬升呈摆动相状态,当右小腿电动推杆11和右大腿电动推杆12的驱动端伸出距离达到抬升设定值时,右小腿电动推杆11和右大腿电动推杆12的驱动端回缩使其伸出距离减小,此时右小腿电动推杆11和右大腿电动推杆12驱动人体右小腿和右大腿下落,直到右小腿电动推杆11和右大腿电动推杆12的伸出距离减小到0,此时人体右腿下落至地面处于支撑相状态;然后控制器再向左侧辅助行走组件发出控制指令,左小腿电动推杆9和左大腿电动推杆10的驱动端伸出,以分别驱动人体左小腿和左大腿向上抬升呈摆动相状态,当左小腿电动推杆9和左大腿电动推杆10的驱动端伸出距离达到抬升设定值时,左小腿电动推杆9和左大腿电动推杆10的驱动端回缩使其伸出距离减小,此时左小腿电动推杆9和左大腿电动推杆10驱动人体左小腿和左大腿下落,直到左小腿电动推杆9和左大腿电动推杆10的伸出距离减小到0,此时人体左腿下落至地面处于支撑相状态,控制器通过对右侧辅助行走组件和左侧辅助行走组件的往复驱动,使得人体右腿和左腿在摆动相和支撑相状态往复转换,以此模拟人体的步态行走;当控制器向辅助行走机构发出控制指令时,控制器先控制右大腿电动推杆12的驱动端伸出距离达到第一抬升设定值,然后控制器再控制右小腿电动推杆11的驱动端伸出距
离达到第二抬升设定值,当右大腿电动推杆12的驱动端伸出距离达到第一抬升设定值并保持第一设定时间后,控制器控制右大腿电动推杆12和右小腿电动推杆11的驱动端回缩,直到人体右腿下落至地面处于支撑相状态;然后控制器控制左大腿电动推杆10的驱动端伸出距离达到第一抬升设定值后,控制器再控制左小腿电动推杆9的驱动端伸出距离达到第二抬升设定值,当左大腿电动推杆10的驱动端伸出距离达到第一抬升设定值并保持第一设定时间后,控制器控制左大腿电动推杆10和左小腿电动推杆9的驱动端回缩,直到人体左腿下落至地面处于支撑相状态;如此往复,控制器使得人体右腿和左腿在摆动相和支撑相状态往复转换,以此模拟人体的步态行走;步骤6)判断用户是否退出指令,若否则返回执行步骤1),若是则执行步骤7);步骤7)结束。
67.最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。