1.本发明涉及一种内窥镜用物镜及内窥镜。
背景技术:
2.以往,作为在内窥镜中使用的物镜,已知有下述专利文献1中记载的物镜。
3.专利文献1:日本专利第2876252号公报
4.在内窥镜中,期望欲整体观察广范围,并且期望欲局部详细观察在整体观察中发现的患部等。由此,要求一种可以切换使用适合整体观察的远点侧观察状态和适合局部观察的近点侧放大观察状态的内窥镜用物镜。尤其,要求在远点侧观察状态下为广角,并要求在近点侧放大观察状态下具有高成像倍率。并且,在内窥镜用物镜中,也要求在满足上述期望的同时,抑制光学系统的大型化,并可以获得高画质的图像。
技术实现要素:
5.本发明是鉴于上述情况而完成的,其目的在于提供一种内窥镜用物镜及具备该内窥镜用物镜的内窥镜,所述内窥镜用物镜抑制光学系统的大型化,并且同时实现远点侧观察状态下的广角化和近点侧观察状态下的高倍率化,在从最远点至最近点的整个区域的物体距离上的观察中,保持良好的光学性能。
6.本发明的内窥镜用物镜,其仅具备4个透镜组作为透镜组,所述4个透镜组从物体侧向像侧依次由具有负屈光力的第1透镜组、具有正屈光力的第2透镜组、具有负屈光力的第3透镜组、具有正屈光力的第4透镜组组成,在从最远点物体对焦于最近点物体时,第1透镜组被固定,第2透镜组及第3透镜组沿着光轴移动,在将对焦于最远点物体的状态下的整个系统的焦距设为fw,将对焦于最近点物体的状态下的整个系统的焦距设为ft,将第3透镜组的焦距设为f3的情况下,满足下述条件式(1)及(2)。
7.0<fw/ft<0.63
ꢀꢀ
(1)
8.‑
2.3<f3/fw<0
ꢀꢀ
(2)
9.本发明的内窥镜用物镜优选满足下述条件式(1
‑
1)及(2
‑
1)中的至少一个。
10.满足由0.5<fw/ft<0.62
ꢀꢀ
(1
‑
1)
11.满足由
‑
2.1<f3/fw<
‑
1.5
ꢀꢀ
(2
‑
1)
12.在将第2透镜组的焦距设为f2的情况下,本发明的内窥镜用物镜优选满足下述条件式(3),更优选满足下述条件式(3
‑
1)。
13.1.9<f2/fw<5
ꢀꢀ
(3)
14.满足由2.2<f2/fw<2.8
ꢀꢀ
(3
‑
1)
15.在将对焦于最近点物体的状态下的第1透镜组与第2透镜组的合成焦距设为f12t,将对焦于最近点物体的状态下的第3透镜组与第4透镜组的合成焦距设为f34t的情况下,本发明的内窥镜用物镜优选满足下述条件式(4),更优选满足下述条件式(4
‑
1)。
16.0<f12t/f34t<0.25
ꢀꢀ
(4)
17.满足由0<f12t/f34t<0.15
ꢀꢀ
(4
‑
1)
18.在第2透镜组与第3透镜组之间优选配置有孔径光阑。在第2透镜组与第3透镜组之间配置有孔径光阑的情况下,在从最远点物体对焦于最近点物体时,孔径光阑优选被固定。
19.在从最远点物体对焦于最近点物体时,优选第2透镜组向物体侧移动,第3透镜组向像侧移动。
20.在将对焦于最近点物体的状态下的第2透镜组与第3透镜组在光轴上的间隔设为d23t,将对焦于最远点物体的状态下的第2透镜组与第3透镜组在光轴上的间隔设为d23w的情况下,本发明的内窥镜用物镜优选满足下述条件式(5),更优选满足下述条件式(5
‑
1)。
21.1<(d23t
‑
d23w)/(fw
×
ft)
1/2
<1.5
ꢀꢀ
(5)
22.满足由1.1<(d23t
‑
d23w)/(fw
×
ft)
1/2
<1.38
ꢀꢀ
(5
‑
1)
23.第1透镜组可以构成为,仅包括3个透镜作为透镜,所述3个透镜从物体侧向像侧依次由具有负屈光力的第1透镜、具有负屈光力的第2透镜、具有正屈光力的第3透镜组成,第2透镜与第3透镜彼此接合。在将第1透镜组设为上述结构的情况下,第1透镜的物体侧透镜面优选为平面。
24.第2透镜组可以构成为,由具有正屈光力的第4透镜组成。
25.第3透镜组可以构成为,由具有正屈光力的第5透镜与具有负屈光力的第6透镜从物体侧向像侧依次接合而成的接合透镜组成。
26.第4透镜组可以构成为,从物体侧向像侧依次由具有正屈光力的第7透镜、具有正屈光力的第8透镜、具有负屈光力的第9透镜组成,第8透镜与第9透镜彼此接合。
27.本发明的内窥镜具备本发明的内窥镜用物镜。
28.另外,本说明书的“由~组成,”、“由~构成的”是指除了所举出的构成要件以外,还可以包括:实质上不具有屈光力的透镜;光圈、滤光片及盖玻璃等除了透镜以外的光学要件;及透镜凸缘、镜筒及成像元件等。
29.另外,在本说明书中,“具有正屈光力的~组”是指整个组具有正屈光力。同样地,“具有负屈光力的~组”是指整个组具有负屈光力。“具有正屈光力的透镜”及“正透镜”的含义相同。“具有负屈光力的透镜”及“负透镜”的含义相同。“~透镜组”并不限定于由多个透镜组成的结构,也可以设为仅由一片透镜组成的结构。
[0030]“单透镜”是指未接合的一片透镜。然而,复合非球面透镜(球面透镜与形成在该球面透镜上的非球面形状的膜构成为一体,并且整体作为一个非球面透镜发挥功能的透镜)不视为接合透镜,而当作一片透镜。除非另有说明,否则在近轴区域考虑与包括非球面的透镜有关的屈光力的符号及表面形状。
[0031]
在本说明书中,“整个系统”是指内窥镜用物镜。条件式中使用的“焦距”是近轴焦距。条件式中使用的值为以d线为基准时的值。本说明书中记载的“d线”、“c线”、“f线”及“h线”为明线,d线的波长为587.56nm(纳米),c线的波长为656.27nm(纳米),f线的波长为486.13nm(纳米),h线的波长为404.66nm(纳米)。
[0032]
发明效果
[0033]
根据本发明,能够提供一种内窥镜用物镜及具备该内窥镜用物镜的内窥镜,所述内窥镜用物镜抑制光学系统的大型化,并且同时实现远点侧观察状态下的广角化和近点侧观察状态下的高倍率化,在从最远点至最近点的整个区域的物体距离上的观察中,保持良
好的光学性能。
附图说明
[0034]
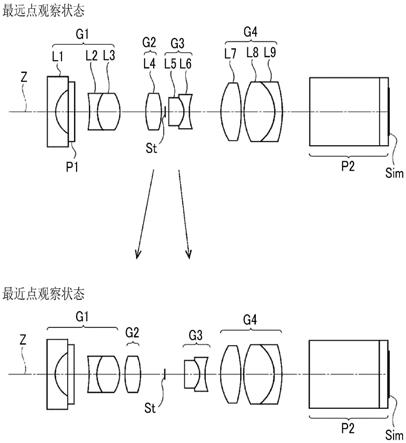
图1是对应于本发明的实施例1的内窥镜用物镜,并表示本发明的一实施方式所涉及的内窥镜用物镜的结构的剖视图。
[0035]
图2是本发明的实施例1的内窥镜用物镜的各像差图。
[0036]
图3是表示本发明的实施例2的内窥镜用物镜的结构的剖视图。
[0037]
图4是本发明的实施例2的内窥镜用物镜的各像差图。
[0038]
图5是表示本发明的实施例3的内窥镜用物镜的结构的剖视图。
[0039]
图6是本发明的实施例3的内窥镜用物镜的各像差图。
[0040]
图7是表示本发明的实施例4的内窥镜用物镜的结构的剖视图。
[0041]
图8是本发明的实施例4的内窥镜用物镜的各像差图。
[0042]
图9是表示本发明的实施例5的内窥镜用物镜的结构的剖视图。
[0043]
图10是本发明的实施例5的内窥镜用物镜的各像差图。
[0044]
图11是本发明的一实施方式所涉及的内窥镜的概略结构图。
具体实施方式
[0045]
以下,参考附图对本发明的实施方式进行详细说明。图1是表示包括本发明的一实施方式所涉及的内窥镜用物镜的光轴z的剖面中的结构的图。图1所示例对应于后述实施例1。在图1中,左侧是物体侧,右侧是像侧。在本说明书中,将对焦于最远点物体的状态称为最远点观察状态,将对焦于最近点物体的状态称为最近点观察状态。在图1中,在上段示出最远点观察状态,在下段示出最近点观察状态。
[0046]
本发明的内窥镜用物镜仅具备4个透镜组作为透镜组,所述4个透镜组沿着光轴z从物体侧向像侧依次由具有负屈光力的第1透镜组g1、具有正屈光力的第2透镜组g2、具有负屈光力的第3透镜组g3、具有正屈光力的第4透镜组g4组成。通过设为这种结构,在抑制光学系统的大型化的同时,在从最远点至最近点的整个区域的物体距离上的观察中,容易确保良好的光学性能。
[0047]
图1示例的内窥镜用物镜构成为如下:在从最远点物体对焦于最近点物体时,第1透镜组g1被固定,第2透镜组g2及第3透镜组g3沿着光轴z移动。通过该结构,良好地维持观察时的操作性,并且容易同时实现远点侧观察状态下的广角化和近点侧观察状态下的高倍率化。另外,在本说明书中,“高倍率”是指成像倍率的绝对值大。
[0048]
通过将对焦时移动的透镜组的数量设为两个,能够简化透镜组的移动机构的同时,抑制由透镜组的移动引起的像差变动,并且提高相对于各透镜组的移动距离设定对焦速度的自由度,使用者能够容易使用。并且,对焦时通过使具有正屈光力的透镜组和具有负屈光力的透镜组移动,能够抑制由透镜组的移动引起的像差变动,尤其能够很好地抑制色差变动。
[0049]
并且,对焦时,由于最靠近物体侧的透镜组即第1透镜组g1不移动,因此有利于确保气密性。在内窥镜中,在没有保护部件的情况下将内窥镜用物镜搭载于内窥镜,通常使内窥镜用物镜中最靠近物体侧透镜兼具光学窗的功能。并且,在该情况下,由于要求保持气密
性,因此第1透镜组g1不移动的结构是有利的。
[0050]
作为一例,在图1示例中,在从最远点物体对焦于最近点物体时,第2透镜组g2向物体侧移动,第3透镜组g3向像侧移动。即,在从最远点物体对焦于最近点物体时,第2透镜组g2与第3透镜组g3的彼此间隔发生变化。通过设为这种结构,确保良好的光学性能,并且容易同时实现远点侧观察状态下的广角化和近点侧观察状态下的高倍率化。在图1的上段与下段之间记入有表示从最远点物体对焦于最近点物体时第2透镜组g2及第3透镜组g3的概略移动方向的箭头。
[0051]
该内窥镜用物镜构成为,在将对焦于最远点物体的状态下的整个系统的焦距设为fw,将对焦于最近点物体的状态下的整个系统的焦距设为ft的情况下,满足下述条件式(1)。关于条件式(1)的下限,由于fw>0,ft>0,因此0<fw/ft。通过使得不会成为条件式(1)的上限以上,容易同时实现远点侧观察状态下的广角化和近点侧观察状态下的高倍率化。内窥镜用物镜优选满足下述条件式(1
‑
1),以获得更好的特性。通过使得不会成为条件式(1
‑
1)的下限以下,容易抑制光学系统的大型化。
[0052]
0<fw/ft<0.63
ꢀꢀ
(1)
[0053]
满足由0.5<fw/ft<0.62
ꢀꢀ
(1
‑
1)
[0054]
并且,该内窥镜用物镜构成为,在将对焦于最远点物体的状态下的整个系统的焦距设为fw,将第3透镜组g3的焦距设为f3的情况下,满足下述条件式(2)。通过使得不会成为条件式(2)的下限以下,容易抑制光学系统的大型化。关于条件式(2)的上限,fw>0,由于第3透镜组g3具有负屈光力,因此f3<0,因此f3/fw<0。内窥镜用物镜优选满足下述条件式(2
‑
1),以获得更好的特性。通过使得不会成为条件式(2
‑
1)的上限以上,在从最远点至最近点的整个区域的物体距离上的观察中,容易确保良好的光学性能。
[0055]
‑
2.3<f3/fw<0
ꢀꢀ
(2)
[0056]
满足由
‑
2.1<f3/fw<
‑
1.5
ꢀꢀ
(2
‑
1)
[0057]
此外,在将第2透镜组g2的焦距设为f2,将对焦于最远点物体的状态下的整个系统的焦距设为fw的情况下,该内窥镜用物镜优选满足下述条件式(3)。通过使得不会成为条件式(3)的下限以下,在从最远点至最近点的整个区域的物体距离上的观察中,容易确保良好的光学性能。通过使得不会成为条件式(3)的上限以上,容易抑制光学系统的大型化。内窥镜用物镜优选满足下述条件式(3
‑
1),以获得更好的特性。
[0058]
1.9<f2/fw<5
ꢀꢀ
(3)
[0059]
满足由2.2<f2/fw<2.8
ꢀꢀ
(3
‑
1)
[0060]
并且,在将对焦于最近点物体的状态下的第1透镜组g1与第2透镜组g2的合成焦距设为f12t,将对焦于最近点物体的状态下的第3透镜组g3与第4透镜组g4的合成焦距设为f34t的情况下,该内窥镜用物镜优选满足下述条件式(4)。通过以第1透镜组g1和第2透镜组g2的合成屈光力与第3透镜组g3和第4透镜组g4的合成屈光力之比在条件式(4)的范围内的方式满足条件式(4),容易同时确保近点侧观察状态下的高倍率化和良好的光学性能。内窥镜用物镜优选满足下述条件式(4
‑
1),以获得更好的特性。
[0061]
0<f12t/f34t<0.25
ꢀꢀ
(4)
[0062]
满足由0<f12t/f34t<0.15
ꢀꢀ
(4
‑
1)
[0063]
并且,在将对焦于最近点物体的状态下的第2透镜组g2与第3透镜组g3在光轴上的
间隔设为d23t,将对焦于最远点物体的状态下的第2透镜组g2与第3透镜组g3在光轴上的间隔设为d23w的情况下,该内窥镜用物镜优选满足下述条件式(5)。通过使得不会成为条件式(5)的下限以下,容易同时实现远点侧观察状态下的广角化和近点侧观察状态下的高倍率化。通过使得不会成为条件式(5)的上限以上,容易抑制光学系统的大型化。内窥镜用物镜优选满足下述条件式(5
‑
1),以获得更好的特性。
[0064]
1<(d23t
‑
d23w)/(fw
×
ft)
1/2
<1.5
ꢀꢀ
(5)
[0065]
满足由1.1<(d23t
‑
d23w)/(fw
×
ft)
1/2
<1.38
ꢀꢀ
(5
‑
1)
[0066]
如图1中所例示,本发明的内窥镜用物镜能够如下构成。第1透镜组g1可以构成为,仅包括3个透镜作为透镜,所述3个透镜从物体侧向像侧依次由具有负屈光力的第1透镜l1、具有负屈光力的第2透镜l2、具有正屈光力的第3透镜l3组成,第2透镜l2与第3透镜l3彼此接合。在这种情况下,不会使光学系统大型化,而容易同时实现远点侧观察状态下的广角化、以及在从最远点至最近点的整个区域的物体距离上的观察中确保良好的光学性能。
[0067]
第1透镜l1的物体侧透镜面优选为平面。在这种情况下,有利于减小第1透镜l1的外径。并且,能够提高第1透镜l1的制造性,并且能够减少液体附着于第1透镜l1的物体侧的表面等。
[0068]
第2透镜组g2可以构成为,由具有正屈光力的第4透镜l4组成。在这种情况下,由最小限度数量的透镜构成的同时,在从最远点至最近点的整个区域的物体距离上的观察中确保良好的光学性能,尤其,容易确保与球面像差及像面弯曲有关的良好的光学性能。
[0069]
第3透镜组g3可以构成为,由具有正屈光力的第5透镜l5和具有负屈光力的第6透镜l6从物体侧向像侧依次接合的接合透镜组成。在这种情况下,由最小限度数量的透镜构成的同时,在从最远点至最近点的整个区域的物体距离上的观察中确保良好的光学性能,尤其,容易确保与轴上色差及倍率色差有关的良好的光学性能。
[0070]
第4透镜组g4可以构成为,从物体侧向像侧依次由具有正屈光力的第7透镜l7、具有正屈光力的第8透镜l8、具有负屈光力的第9透镜l9组成,第8透镜l8和第9透镜l9彼此接合。在这种情况下,由最小限度数量的透镜构成的同时,在从最远点至最近点的整个区域的物体距离上的观察中确保良好的光学性能,尤其,容易确保与像面弯曲及倍率色差有关的良好的光学性能。
[0071]
孔径光阑st可以构成为,配置在第2透镜组g2与第3透镜组g3之间。在这种情况下,在从最远点至最近点的整个区域的物体距离上的观察中,容易适当地设定f值,并且,由此容易同时实现确保景深和确保良好的光学性能。
[0072]
在孔径光阑st配置在第2透镜组g2与第3透镜组g3之间的情况下,在从最远点物体对焦于最近点物体时,孔径光阑st优选被固定。在这种情况下,在确保由上述孔径光阑st配置在第2透镜组g2与第3透镜组g3之间引起的效果的同时,能够减小机构的复杂化。
[0073]
另外,在图1所示例中,在第1透镜l1与第2透镜l2之间配置有平行平板状的光学部件p1,在第4透镜组g4与像面sim之间配置有入射面和出射面平行的光学部件p2。光学部件p1是假定滤光器等的部件,光学部件p2是假定棱镜、滤光器及盖玻璃等的部件。光学部件p1及光学部件p2是不具有屈光力的部件。也可以是省略了光学部件p1及光学部件p2中的至少一个的结构。
[0074]
有关条件式的结构也包括在内,上述优选结构及可实现的结构可以是任意的组
合,优选根据所要求的规格适当地选择性地采用。
[0075]
接着,对本发明的内窥镜用物镜的实施例进行说明。
[0076]
[实施例1]
[0077]
表示实施例1的内窥镜用物镜的结构的剖视图如图1所示,由于其图示方法如上所述,因此在此省略一部分重复说明。实施例1的内窥镜用物镜从物体侧向像侧依次由具有负屈光力的第1透镜组g1、具有正屈光力的第2透镜组g2、孔径光阑st、具有负屈光力的第3透镜组g3、具有正屈光力的第4透镜组g4组成。在从最远点物体对焦于最近点物体时,第2透镜组g2向物体侧移动,第3透镜组g3向像侧移动。第1透镜组g1从物体侧向像侧依次由第1透镜l1、光学部件p1、第2透镜l2及第3透镜l3组成。第2透镜组g2由第4透镜l4组成。第3透镜组g3从物体侧向像侧依次由第5透镜l5及第6透镜l6组成。第4透镜组g4从物体侧向像侧依次由第7透镜l7、第8透镜l8及第9透镜l9组成。第2透镜l2及第3透镜l3彼此接合。第5透镜l5及第6透镜l6彼此接合。第8透镜l8及第9透镜l9彼此接合。第1透镜l1、第4透镜l4及第7透镜l7是单透镜。以上是实施例1的内窥镜用物镜的概要。
[0078]
关于实施例1的内窥镜用物镜,将基本透镜数据示于表1中,将规格及可变面间隔示于表2中。在表1中,在sn栏中示出将最靠近物体侧的表面设为第1面并随着趋向像侧逐一增加编号时的面编号,在r栏中示出各面的曲率半径,在d栏中示出每个面和与其像侧相邻的面在光轴上的面间隔。在nd栏中示出各构成要件相对于d线的折射率,在vd栏中示出各构成要件的d线基准的色散系数。
[0079]
在表1中,将凸面朝向物体侧的形状的面的曲率半径的符号设为正,将凸面朝向像侧的形状的面的曲率半径的符号设为负。表1中还一并示出孔径光阑st、光学部件p1、光学部件p2及像面sim。在表1中,在相当于孔径光阑st的表面的面编号栏中记载有面编号和(st)的用语,在相当于像面sim的表面的面编号栏中记载有面编号和(sim)的用语。在表1中,关于对焦时间隔发生变化的可变面间隔,使用dd[]的记号,在[]中标注该间隔的物体侧的面编号并记入d栏中。
[0080]
在表2中示出关于最远点观察状态及最近点观察状态的物体距离、成像倍率、焦距f、f值fno.、最大总视角2ω及可变面间隔的各个值。物体距离是指从物体至第1透镜组g1的最靠近物体侧的透镜面在光轴上的距离。
[0081]
2ω栏的(
°
)是指单位是度。表2所示值是以d线为基准时的值。
[0082]
在各表的数据中,作为角度单位而使用度,作为长度单位而使用mm(毫米),但是光学系统即使比例放大或比例缩小也可以使用,因此也能够使用其他适当的单位。并且,在以下所示各表中记载有以预先确定的位数来四舍五入的数值。
[0083]
[表1]
[0084]
实施例1
[0085][0086][0087]
[表2]
[0088]
实施例1
[0089] 最远点观察状态最近点观察状态物体距离13.501.78成像倍率
‑
0.0785
‑
0.7287f1.1431.870fno.9.0912.202ω(
°
)140.259.2dd[7]1.180.24dd[9]0.171.10dd[10]0.170.91dd[13]1.450.71
[0090]
图2中示出实施例1的内窥镜用物镜的各像差图。在图2中,从左侧依次示出球面像差图、像散图、畸变像差图及倍率色差图。在图2中,在上段示出最远点观察状态下的各像差图,在下段示出最近点观察状态下的各像差图。最远点观察状态及最近点观察状态下的各像差图是物体距离在规格表中所示值的像差图。在球面像差图中,将d线、c线、f线及h线中的像差分别由实线、长虚线、短虚线及单点划线来表示。在像散图中,将弧矢方向的d线中的像差由实线来表示,将子午方向的d线中的像差由短虚线来表示。在畸变像差图中,将d线中的像差由实线来表示。在倍率色差图中,将c线、f线及h线中的像差分别由长虚线、短虚线及
单点划线来表示。球面像差图的fno.是指f值,其他像差图的ω是指半视角。图2中示出与各图的纵轴上端对应的fno.和ω的值。
[0091]
关于与上述实施例1有关的各数据的记号、含义及记载方法,除非另有说明,否则在以下实施例中也相同,因此以下省略重复说明。
[0092]
[实施例2]
[0093]
将表示实施例2的内窥镜用物镜的结构的剖视图示于图3中。实施例2的内窥镜用物镜具有与实施例1的内窥镜用物镜的概要相同的结构。关于实施例2的内窥镜用物镜,将基本透镜数据示于表3中,将规格及可变面间隔示于表4中,将各像差图示于图4中。
[0094]
[表3]
[0095]
实施例2
[0096]
snrdndvd1∞0.35001.8829940.7821.46910.5900
ꢀꢀ
3∞0.30002.0010029.134∞0.6600
ꢀꢀ5‑
3.64920.39001.8829940.7861.21331.07001.4970081.547
‑
1.5391dd[7]
ꢀꢀ
83.12440.69001.4970081.549
‑
2.1743dd[9]
ꢀꢀ
10(st)∞dd[10]
ꢀꢀ
11∞0.64001.9228618.9012
‑
1.30230.25001.9537532.32132.2754dd[13]
ꢀꢀ
142.78241.23001.4387594.6615
‑
3.50510.1000
ꢀꢀ
162.93481.31001.4387594.6617
‑
1.99320.35001.9228618.9018
‑
6.13081.2426
ꢀꢀ
19∞3.20001.8829940.7820∞0.40001.4714465.4121(sim)∞
ꢀꢀꢀ
[0097]
[表4]
[0098]
实施例2
[0099] 最远点观察状态最近点观察状态物体距离18.951.93成像倍率
‑
0.0566
‑
0.6816f1.1361.900fno.9.0512.31
2ω(
°
)140.458.2dd[7]1.050.15dd[9]0.171.07dd[10]0.170.92dd[13]1.370.62
[0100]
[实施例3]
[0101]
将表示实施例3的内窥镜用物镜的结构的剖视图示于图5中。实施例3的内窥镜用物镜具有与实施例1的内窥镜用物镜的概要相同的结构。关于实施例3的内窥镜用物镜,将基本透镜数据示于表5中,将规格及可变面间隔示于表6中,将各像差图示于图6中。
[0102]
[表5]
[0103]
实施例3
[0104]
snrdndvd1∞0.35001.8829940.7821.50570.61653∞0.35002.0010029.134∞0.6604
ꢀꢀ5‑
2.44740.40001.8829940.7861.36410.97381.4970081.547
‑
1.4230dd[7]
ꢀꢀ
82.58450.68531.4970081.549
‑
2.3861dd[9]10(st)∞dd[i0]11
‑
15.57440.61851.9228618.9012
‑
1.42520.36001.9108235.25132.3841dd[13]142.61610.96601.4387594.6615
‑
3.11160.1291164.88111.38041.4387594.6617
‑
1.61820.35001.9228618.9018
‑
3.77171.282019∞3.20001.8829940.7820∞0.40001.4714465.4121(sim)∞
[0105]
[表6]
[0106]
实施例3
[0107]
最远点观察状态最近点观察状态物体距离10.401.24成像倍率
‑
0.0963
‑
0.9668f1.1131.954
fno.9.0713.822ω(
°
)139.650.6dd[7]1.060.15dd[9]0.191.10dd[10]0.171.25dd[13]1.440.37
[0108]
[实施例4]
[0109]
将表示实施例4的内窥镜用物镜的结构的剖视图示于图7中。实施例4的内窥镜用物镜具有与实施例1的内窥镜用物镜的概要相同的结构。关于实施例4的内窥镜用物镜,将基本透镜数据示于表7中,将规格及可变面间隔示于表8中,将各像差图示于图8中。
[0110]
[表7]
[0111]
实施例4
[0112]
snrdndvd1∞0.45001.8829940.7821.31200.60673∞0.37462.0010029.134∞0.60115
‑
4.51410.29701.8829940.7861.23401.01681.4387594.667
‑
1.4350dd[7]82.53060.70251.4970081.549
‑
2.2042dd[9]10(st)∞dd[10]11
‑
24.10970.68691.7847225.6812
‑
0.85300.35101.8829940.78133.0564dd[13] 142.25230.88991.4970081.5415
‑
6.25420.2909
ꢀꢀ
164.66321.23291.4387594.6617
‑
1.45000.46701.9228618.9018
‑
3.26661.2175
ꢀꢀ
19∞3.20001.8829940.7820∞0.40001.4714465.4121(sim)∞
ꢀꢀꢀ
[0113]
[表8]
[0114]
实施例4
[0115] 最远点观察状态最近点观察状态物体距离20.201.37成像倍率
‑
0.0527
‑
0.9165
f1.1231.948fno.7.9311.702ω(
°
)140.852.2dd[7]1.060.15dd[9]0.171.08dd[10]0.171.17dd[13]1.330.34
[0116]
[实施例5]
[0117]
将表示实施例5的内窥镜用物镜的结构的剖视图示于图9中。实施例5的内窥镜用物镜具有与实施例1的内窥镜用物镜的概要相同的结构。关于实施例5的内窥镜用物镜,将基本透镜数据示于表9中,将规格及可变面间隔示于表10中,将各像差图示于图10中。
[0118]
[表9]
[0119]
实施例5
[0120]
snrdndvd1∞0.35001.8829940.7821.24960.5900
ꢀꢀ
3∞0.30002.0010029.134∞1.0100
ꢀꢀ5‑
9.96010.40002.0010029.1361.71050.88001.5174252.437
‑
1.7105dd[7]
ꢀꢀ
85.48880.68001.5952267.739
‑
2.3793dd[9]
ꢀꢀ
10(st)∞dd[10]
ꢀꢀ
11∞0.72001.8928620.3612
‑
0.95250.25001.9537532.32132.4380dd[13]
ꢀꢀ
142.85781.05001.4387594.6615
‑
2.85780.1000
ꢀꢀ
163.33861.31001.4387594.6617
‑
1.90040.35001.9459517.9818
‑
4.91361.2409
ꢀꢀ
19∞3.20001.8829940.7820∞0.40001.4714465.4121(sim)∞
ꢀꢀꢀ
[0121]
[表10]
[0122]
实施例5
[0123] 最远点观察状态最近点观察状态物体距离13.501.75
成像倍率
‑
0.0679
‑
0.6580f0.9941.778fno.8.7111.792ω(
°
)160.858.6dd[7]1.310.25dd[9]0.171.23dd[10]0.170.86dd[13]1.430.73
[0124]
表11中示出实施例1~5的内窥镜用物镜的条件式(1)~(5)的对应值。
[0125]
实施例1~5将d线设为基准波长。表11中示出d线基准下的值。
[0126]
[表11]
[0127][0128][0129]
实施例1~5的内窥镜用物镜虽然构成为小型,但是最远点观察状态下的总视角为135
°
以上,最近点观察状态下的成像倍率的绝对值为0.65以上,同时实现了远点侧观察状态下的广角化和近点侧观察状态下的高倍率化。并且,实施例1~5的内窥镜用物镜在最远点观察状态和最近点观察状态下性能变化不大,在两种状态下各像差均良好地被校正,从而保持高光学性能。
[0130]
接着,对本发明的实施方式所涉及的内窥镜进行说明。图11中示出本发明的一实施方式所涉及的内窥镜的概略整体结构图。图11所示内窥镜100主要具备操作部102、插入部104及与连接器部(未图示)连接的通用塞绳106。插入部104的大部分为沿插入路径向任意方向弯曲的软性部107,在软性部107的前端连结有弯曲部108,在弯曲部108的前端连结有前端部110。弯曲部108为了使前端部110朝向所期望的方向而设置,并且可以通过转动设置于操作部102的弯曲操作旋钮109而进行弯曲操作。在前端部110的内部前端配设有本发明的实施方式所涉及的内窥镜用物镜1和成像元件2。成像元件2例如是ccd(charge coupled device:电荷耦合器件)或cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)等。成像元件2以其成像面与内窥镜用物镜1的像面一致的方式配置。另外,图11所示的内窥镜用物镜1及成像元件2是概念图。
[0131]
以上,举出实施方式及实施例对本发明的技术进行了说明,但是本发明的技术并不限定于上述实施方式及实施例,而可以进行各种变形。例如,各透镜的曲率半径,面间隔,折射率及色散系数等并不限定于在上述各数值实施例中所示出的值,而可以采用其他值。
[0132]
符号说明
[0133]1‑
内窥镜用物镜,2
‑
成像元件,100
‑
内窥镜,102
‑
操作部,104
‑
插入部,106
‑
通用塞绳,107
‑
软性部,108
‑
弯曲部,109
‑
弯曲操作旋钮,110
‑
前端部,l1
‑
第1透镜,l2
‑
第2透镜,l3
‑
第3透镜,l4
‑
第4透镜,l5
‑
第5透镜,l6
‑
第6透镜,l7
‑
第7透镜,l8
‑
第8透镜,l9
‑
第9透镜,g1
‑
第1透镜组,g2
‑
第2透镜组,g3
‑
第3透镜组,g4
‑
第4透镜组,p1、p2
‑
光学部件,sim
‑
像面,
st
‑
孔径光阑,z
‑
光轴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。