1.本实用新型涉及微小力值标定与计量测试技术领域,特别涉及一种叠加式微型测力传感器任意点标定装置。
背景技术:
2.微型测力传感器由于其尺寸小,无法做到很高的精度,多用在测量空间小、所测力值较小、精度要求较高的场合。近年来,除新材料和纳米技术等相关行业外,烟草行业对微型测力传感器需求也越来越多,尤其在一些卷烟和滤棒硬度测量设备中,微型测力传感器作为标准测力装置对统一卷烟和滤棒硬度测量设备量值起到关键性的作用。但实际使用中发现由于微型测力传感器校准方式的限制,导致多台微型测力传感器测量时会出现较大差距,且同一微型测力传感器不同次校准也会出现差异。
3.中国发明专利(201720213411 .8申请日 :2017
‑
03
‑
07) 公开了一种高精度等臂杠杆式小力值标准装置,能实现小力值的检定工作,但不可避免会引入摩擦力,而这部分摩擦力对微型测力传感器的标定会产生较大影响,且仅能对特定的一些力值点进行检定。
4.中国发明专利(201210418127.6申请日 :2012
‑
10
‑
26) 公开了气浮静重式微型测力传感器标定装置,能够实现微型测力传感器标定及校准工作,具有无摩擦、无噪音的优点。但实际使用时发现由于其空气轴承本身重力的影响,无法对除零点外小于空气轴承重力的力值进行标定及校准,并且由于采用压缩空气作为润滑剂,空气轴承上下均有空气流出,在标定及校准过程中空气气流会加载在微型测力传感器上,对标定结果产生影响,且不同介质不同的压力产生影响也有所不同。
技术实现要素:
5.本实用新型的目的是为了解决上述问题,提供一种叠加式微型测力传感器任意点标定装置。该装置通过与体积较大的高精度的测力传感器比对及杠杆施力的方式,可以在微型测力传感器量程范围内任意点进行标定及校准,且标定过程不会引入摩擦力,操作简便。
6.本实用新型的目的是通过以下技术方案来实现的:
7.一种叠加式微型测力传感器任意点标定装置,包括施力杠杆机构、叠加式测力机构、丝杆调节机构;
8.所述施力杠杆机构包括l型底座、支撑座、等臂杠杆主梁、托盘、游码、导向横梁、第一连杆、第二连杆及施力轴,支撑座固定在l型底座的底面,等臂杠杆主梁通过支撑轴设置支撑座上,等臂杠杆主梁两侧各安装有托盘和游码,导向横梁呈悬臂结构固定在l型底座的立面上、并处于等臂杠杆主梁左端的正下方,导向横梁上开设有垂直导向孔,等臂杠杆主梁左端铰接有第二连杆、第一连杆,第一连杆下端为圆柱形施力轴,该圆柱形施力轴插装在导向横梁上开设的垂直导向孔中;
9.所述叠加式测力机构由上至下依次包括微型测力传感器、微型测力传感器放置平
台、高精度测力传感器、高精度测力传感器放置平台,且各测力传感器受力轴轴心与各放置平台中心轴线与上述垂直导向孔轴心重合;
10.所述丝杆调节机构包括丝杆基座、丝杆滑动平台、丝杆、丝杆上限位板、丝杆止动锁和丝杆手轮,丝杆滑动平台可以在丝杆基座和丝杆上限位板之间位移,丝杆滑动平台与上述高精度测力传感器放置平台一侧对接卡装在一起且上表面平行,转动丝杆手轮可以调节丝杆滑动平台的高低位置,通过丝杆止动锁可以锁定丝杆滑动平台的位置以使高精度测力传感器放置平台固定在某一高度。
11.在本实用新型中,所述第一连杆为t形结构,即第一连杆与圆柱形施力轴为一体结构。
12.支撑座呈三角形结构,顶部开设有主梁安装凹槽,等臂杠杆主梁通过支撑轴设置在支撑座顶部的主梁安装凹槽中,该凹槽的设置可限制等臂杠杆主梁的转动角度,防止第一连杆施力轴由于转动角度大二脱离垂直导向孔。
13.所述第二连杆与等臂杠杆主梁左端通过平行轴铰接,该平行轴与等臂杠杆主梁的支撑轴相平行。
14.所述第二连杆与第一连杆之间通过铰轴相连。
15.本实用新型的机理在于:施力杠杆机构设置有两个游码和两个托盘,调节游码的位置或在托盘中加载砝码可以产生所需要的力值,并通过调节丝杆调节机构调整叠加式测力机构的位置使产生的力值加载在微型测力传感器上,叠加式测力机构通过与高精度的测力传感器比对有效实现微型测力传感器在任意力值点的标定。
16.本实用新型更具体的说明如下:
17.本实用新型主要包括施力杠杆机构、叠加式测力机构、丝杆调节机构;
18.施力杠杆机构设置有底座、等臂杠杆主梁、两个托盘、两个游码、支撑杆、支撑轴、导向横梁、导向孔、第一连杆和第二连杆。底座为l型,底座的底面上设置有支撑杆,底座的竖直面上设置有导向横梁,导向横梁上设置有导向孔;支撑杆顶部设置有支撑轴,等臂杠杆主梁中部通过支撑轴与支撑杆连接,等臂杠杆主梁可以绕支撑轴转动,等臂杠杆主梁两侧各安装一个托盘和一个游码,两个托盘距离支撑轴距离相等,两个游码可沿等臂杠杆主梁移动;第二连杆一端和等臂杠杆横梁一端连接,第二连杆可绕第二连杆与等臂杠杆主梁的连接轴转动,第二连杆的另一端和第一连杆连接,第二连杆可绕第二连杆与第一连杆的连接轴转动,第一连杆成t字形下端为圆柱体,圆柱体穿过导向孔且与导向孔同轴。
19.叠加式测力机构设置有微型测力传感器、微型测力传感器放置平台、高精度测力传感器、高精度测力传感器放置平台。高精度测力传感器安装于高精度测力传感器放置平台上方,受压面竖直向上,微型测力传感器放置平台安装于高精度测力传感器受力轴上方,微型测力传感器放置平台轴线中心与高精度测力传感器受力轴轴线重合,待校准的微型测力传感器固定在微型测力传感器放置平台中心位置,微型测力传感器受力轴轴心与微型测力传感器放置平台中心轴线和导向孔重合。
20.丝杆调节机构设置有丝杆基座、丝杆滑动平台、丝杆、丝杆上限位板、丝杆止动锁和丝杆手轮。丝杆滑动平台可以在丝杆基座和丝杆上限位板之间滑动,丝杆滑动平台与高精度测力传感器放置平台一侧对接安装,丝杆滑动平台与高精度测力传感器放置平台上表面平行,转动丝杆手轮可以调节丝杆滑动平台的高低位置,通过丝杆止动锁可以锁定丝杆
滑动平台的位置进而使高精度测力传感器放置平台固定在某一高度。
21.本实用新型的突出特点是:提供一种叠加式微型测力传感器任意点标定装置,该装置能通过与高精度的测力传感器比对有效实现微型测力传感器在任意力值点的标定;该装置的丝杆调节机构可以调节高精度测力传感器放置平台的高低,进而调节微型测力传感器的高低,可以使施力杠杆机构工作在最有效的位置;该装置可以更换多种规格的高精度测力传感器,也可以实现多种规格微型测力传感器的标定;另外,该装置不仅能实现压力型微型测力传感器的标定,若将第一连杆施力轴一端与微型测力传感器连接,也可以实现拉力型微型测力传感器的标定。
附图说明
22.下面结合附图和实施例对本实用新型进一步说明。
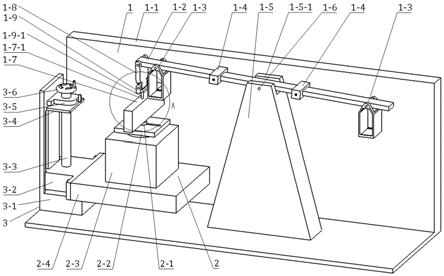
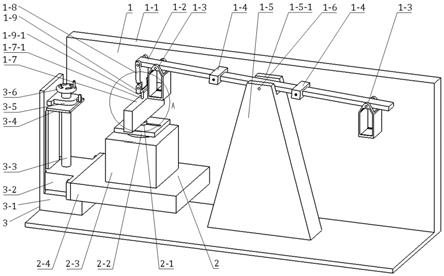
23.图1为本实用新型标定装置的结构示意图;
24.图2为图1中a部位的局部放大示意图;
25.图3为第一连杆结构示意图;
26.图1中:
27.1. 施力杠杆机构,1
‑
1.l型底座,1
‑
2.等臂杠杆主梁,1
‑
3.托盘,1
‑
4.游码,1
‑
5.支撑座,1
‑5‑
1.凹槽,1
‑
6.支撑轴,1
‑
7.导向横梁,1
‑7‑
1.导向孔,1
‑
8.第二连杆,1
‑
9.第一连杆,1
‑9‑
1.施力轴;
28.2.叠加式测力机构,2
‑
1. 微型测力传感器,2
‑
2.微型测力传感器放置平台,2
‑
3. 高精度测力传感器,2
‑
4.高精度测力传感器放置平台;
29.3. 丝杆调节机构,3
‑
1.丝杠底座,3
‑
2.丝杆滑动平台,3
‑
3.丝杆,3
‑
4.丝杆上限位板,3
‑
5.丝杆止动锁,3
‑
6.丝杆手轮。
30.本文中所说的上、下、左、右均是以图1所示位置为准。
具体实施方式
31.本实用新型以下结合附图做进一步详细描述:
32.如图1
‑
3所示:一种叠加式微型测力传感器任意点标定装置,包括施力杠杆机构1、叠加式测力机构2、丝杆调节机构3;
33.所述施力杠杆机构1包括l型底座1
‑
1、支撑座1
‑
5、等臂杠杆主梁1
‑
2、托盘1
‑
3、游码1
‑
4、导向横梁1
‑
7、第二连杆1
‑
8、第二连杆1
‑
9及施力轴1
‑9‑
1,支撑座1
‑
5固定在l型底座1
‑
1的底面上,等臂杠杆主梁1
‑
2通过支撑轴1
‑
6设置支撑座1
‑
5上,等臂杠杆主梁1
‑
2两侧各安装有托盘1
‑
3和游码1
‑
4,导向横梁1
‑
7呈悬臂结构固定在l型底座1
‑
1的立面上、并处于等臂杠杆主梁左端的正下方,导向横梁1
‑
7上开设有垂直导向孔1
‑7‑
1,等臂杠杆主梁1
‑
2左端铰接有第二连杆1
‑
8、第一连杆1
‑
9,第一连杆下端为圆柱形施力轴1
‑9‑
1,该圆柱形施力轴插装在导向横梁1
‑
7上开设的垂直导向孔1
‑7‑
1中;
34.所述叠加式测力机构2由上至下依次包括微型测力传感器2
‑
1、微型测力传感器放置平台2
‑
2、高精度测力传感器2
‑
3、高精度测力传感器放置平台2
‑
4,且各测力传感器受力轴轴心与各放置平台中心轴线与上述垂直导向孔轴心1
‑7‑
1重合;
35.所述丝杆调节机构3包括丝杆基座3
‑
1、丝杆滑动平台3
‑
2、丝杆3
‑
3、丝杆上限位板
3
‑
4、丝杆止动锁3
‑
5和丝杆手轮3
‑
6,丝杆滑动平台3
‑
2可以在丝杆基座3
‑
1和丝杆上限位板3
‑
4之间位移,丝杆滑动平台3
‑
2与上述高精度测力传感器放置平台2
‑
4一侧对接卡装在一起且上表面平行,转动丝杆手轮3
‑
6可以调节丝杆滑动平台3
‑
2的高低位置,通过丝杆止动锁3
‑
5可以锁定丝杆滑动平台的位置以使高精度测力传感器放置平台2
‑
4固定在某一高度。
36.如图3所示:所述第一连杆1
‑
9为t形结构,即第一连杆1
‑
9与圆柱形施力轴1
‑9‑
1为一体结构。
37.支撑座1
‑
5呈三角形结构,顶部开设有主梁安装凹槽1
‑5‑
1,等臂杠杆主梁1
‑
2通过支撑轴1
‑
6设置在支撑座顶部的主梁安装凹槽1
‑5‑
1中,该凹槽的设置可限制等臂杠杆主梁1
‑
2的转动角度,防止第一连杆施力轴1
‑9‑
1由于转动角度大而脱离垂直导向孔1
‑7‑
1。
38.所述第二连杆1
‑
8与等臂杠杆主梁1
‑
2左端通过平行轴铰接,该平行轴与等臂杠杆主梁的支撑轴1
‑
6相平行,所述第二连杆1
‑
9与第一连杆1
‑
8之间通过铰轴相连。等臂杠杆主梁1
‑
2通过第二连杆1
‑
8和等臂杠杆主梁连接轴传递力值,再通过第二连杆1
‑
8传递到第一连杆1
‑
9,最终作用在微型测力传感器2
‑
1上。
39.本实用新型的标定原理及操作过程如下:
40.开始标定微型测力传感器2
‑
1之前,先转动丝杆手轮3
‑
6调节丝杆滑动平台3
‑
2使高精度测力传感器放置平台2
‑
4下移远离导向横梁1
‑
7。选择合适的高精度测力传感器2
‑
3安装在高精度测力传感器放置平台2
‑
4上,并保持高精度测力传感器受力轴与导向孔1
‑7‑
1轴心重合;将微型测力传感器放置平台2
‑
2放置安装在高精度测力传感器2
‑
3上,微型测力传感器2
‑
1固定在微型测力传感器放置平台2
‑
2上,保持高精度测力传感器受力轴、微型测力传感器放置平台中心、微型测力传感器受力轴与导向孔轴心重合,并记录下高精度测力传感器2
‑
3的示值或对其进行清零操作,校准微型测力传感器2
‑
1的零点;通过调节两个游码1
‑
4调节杠杆平衡状态使第一连杆施力轴1
‑9‑
1一端产生向下的力值,然后转动丝杆手轮3
‑
6使微型测力传感器2
‑
1与第一连杆施力轴1
‑9‑
1接触,并使杠杆处于水平状态。最后调节两个游码1
‑
4可以使第一连杆施力轴1
‑9‑
1对微型测力传感器2
‑
1产生较小力值,在两托盘1
‑
3中放置砝码可以使第一连杆施力轴1
‑9‑
1对微型测力传感器2
‑
1产生较大力值,根据标定需要,调节施力杠杆机构1,读取高精度测力传感器2
‑
3的示值,产生所需力值,进行微型测力传感器2
‑
1的任意点力值标定操作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。