1.本实用新型涉及起重机的操作显示技术领域,尤其是涉及一种起重机用的操作手柄。
背景技术:
2.公知的,轻小型起重机作为一种高智能化的多机构运行设备,其在运行过程中会产生多种运行参数,操作人员需要根据操作手柄上的运行参数来判断起重机的运行是否正常,并且起重机的运行指令也是通过操作手柄发出的,另外在某些特定的情况下,还需要对相应参数进行修改,从而保证起重机的正常运行;传统起重机的操作手柄多为数码管显示,但是由于数码管能够显示的字符数较少,只能显示数字和部分字母,因此无法满足较多参数显示的情况,并且传统的起重机操作手柄与起重机是有线连接,因此起重机在运行过程中,操作手柄是直接呈自然垂落的状态,从而容易让手柄与外部物体发生碰撞,造成手柄损伤;因此,综上所述,目前市场上需要一种能够显示多参数,且能够防止自身受损的操作手柄。
技术实现要素:
3.为了克服背景技术中的不足,本实用新型公开了一种起重机用的操作手柄。
4.为实现上述发明目的,本实用新型采用如下技术方案:
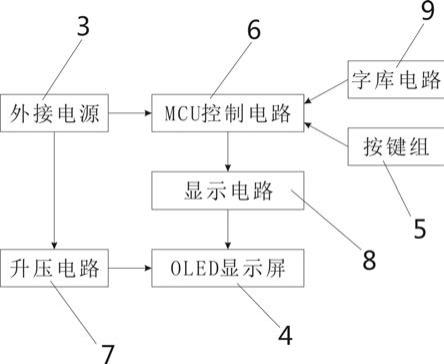
5.一种起重机用的操作手柄,包含壳体和保护罩,所述壳体内设有外接电源,以及由mcu控制电路、显示电路、升压电路和字库电路集成的电路板,所述壳体的操作面设有oled显示屏和按键组;所述外接电源为mcu控制电路以及oled显示屏提供电力,且外接电源通过升压电路与oled显示屏对应电连,所述oled显示屏的信号输入引脚与显示电路的信号输出引脚对应电连,显示电路的信号输入引脚与mcu控制电路的信号输出引脚对应电连,mcu控制电路的输入引脚与按键组和字库电路对应电连;所述壳体外滑动设有保护罩;
6.优选的,所述升压电路由型号为tps61040的电源芯片以及其外回路构成;
7.优选的,所述mcu控制电路由型号为stm32的单片机及其外围回路构成;
8.优选的,所述壳体的两侧面沿长度方向设有滑槽,且滑槽与壳体的顶部面对应连通,所述保护罩内侧面设有与两滑槽分别对应配合的滑块;
9.优选的,所述滑槽的槽底面两端分别设有一定位孔,所述保护罩的外侧面设有能够插入定位孔内的定位机构;
10.优选的,所述定位机构包含限位柱、定位块、支柱、翘杆和弹簧,所述限位柱的尾端对应贯穿保护罩和滑块后与定位块对应铰接,定位块配合位于定位孔内,限位柱的头端柱身环设有挡板,且限位柱的柱身设有弹簧,弹簧的两端分别与挡板和保护罩的外侧面对应连接;所述限位柱的头端与翘杆的尾端对应铰接,翘杆的杆身与支柱的头端对应铰接,支柱对应安装于保护罩的外侧面。
11.由于采用如上所述的技术方案,本实用新型具有如下有益效果:
12.本实用新型公开的一种起重机用的操作手柄,通过设置oled显示屏能够实现汉子、数字和字母的显示,并且该显示屏的清晰度较高,从而能够完整显示起重机的运行参数,方便操作人员对起重机进行操作控制;另外,通过保护罩能够使壳体免受磕碰,从而达到保护壳体的目的。
附图说明
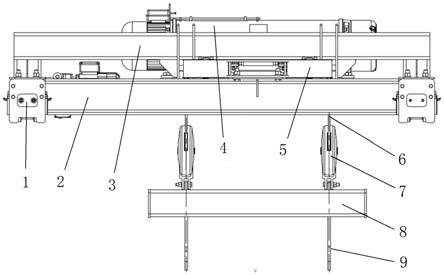
13.图1为本实用新型的一种结构示意图;
14.图2为定位机构的结构示意图。
15.图中:1、壳体;101、滑槽;102、定位孔;2、保护罩;201、滑块;3、外接电源;4、oled显示屏;5、按键组;6、mcu控制电路;7、升压电路;8、显示电路;9、字库电路;10、定位机构;1001、限位柱;1002、定位块;1003、挡板;1004、弹簧;1005、翘杆;1006、支柱。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型的技术方案进行说明,在描述中,需要理解的是,若有术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系,仅是与本实用新型的附图对应,为了便于描述本实用新型,而不是指示或暗示所指的装置或元件必须具有特定的方位:
17.结合附图1
‑
2所述的一种起重机用的操作手柄,包含壳体1和保护罩2,所述壳体1内设有外接电源3,以及由mcu控制电路6、显示电路8、升压电路7和字库电路9集成的电路板,所述壳体1的操作面设有oled显示屏4和按键组5;所述外接电源3为mcu控制电路6以及oled显示屏4提供电力,且外接电源3通过升压电路7与oled显示屏4对应电连,外接电源3设为电池,由于外接电源3的电压一般为3.3v,而oled显示屏4的驱动电压为12v,因此通过升压电路7能够将外接电源3的电压升至12v,来满足为oled显示屏4的供电,特别的,所述升压电路7由型号为tps61040的电源芯片以及其外回路构成,其中当电源芯片内部的mosfet导通时,电源芯片的sw引脚与gnd引脚导通,此时将为外围电路中的电感l1进行充电,当电源芯片内部的mosfet关断时,由于电感l1带电,电流无法突变,因此电流经过外围电路中的二极管d1流向负载端,此时相当于电感l1与3.3v电源共同作为电源串联为负载供电,使得负载电压升高,达到升压的目的;放电结束之后电源芯片内部mosfet再次打开,使得电源芯片的sw引脚电压降低,再次为电感l1充电,但由于二极管的单向导电性,负载回路电流并不会回流,实现电路稳定;另外,外围电路中的电阻r1、r3串联形成一个反馈电路,实时反馈电路中负载端电压,使得输出电源电压不会因为负载电流及负载性质的变化而产生较大波动,实现闭环控制,稳定负载电压;
18.所述oled显示屏4的信号输入引脚与显示电路8的信号输出引脚对应电连,显示电路8的信号输入引脚与mcu控制电路6的信号输出引脚对应电连,mcu控制电路6的输入引脚与按键组5和字库电路9对应电连,另外,mcu控制电路6的信号引脚还与起重机的运行系统对应电连,使mcu控制电路6接收起重机的相应运行参数,并且通过按下按键组5中相应的控制按键,能够让mcu控制电路6向起重机的运行系统发出相应的动作指令,从而达到控制起重机运行的功能,mcu控制电路6在接收到参数数据后,通过调用字库电路9中的相应文字数据,再经过程序运行得出参数数据的显示数据,最后将显示数据传输给显示电路8,由显示
电路8控制oled显示屏4上相应的像素点发光,即实现参数数据的显示,并且oled显示屏4能够显示任何字符,从而完整显示起重机的运行参数,方便操作人员对起重机运行状态的判断,根据需要,所述mcu控制电路6由型号为stm32的单片机及其外围回路构成;
19.所述壳体1外滑动设有保护罩2,该保护罩2能够使壳体1免受磕碰,从而达到保护壳体1的目的,另外,保护罩2由透明材质构成,在不摘除保护罩2时,操作人员也能够看到壳体1上显示的参数数据,此外,所述壳体1的两侧面沿长度方向设有滑槽101,且滑槽101与壳体1的顶部面对应连通,所述保护罩2内侧面设有与两滑槽101分别对应配合的滑块201,壳体1的顶部面设有用于主控制线穿过的通孔,该主控制线一端与起重机的控制系统相连,另一端与壳体1内的电路板相连,保护罩2同样设有用于住控制线穿过的通孔,保护罩2的底部面设为开口,且保护罩2的底部面与壳体1的顶部面相对应,在安装保护罩2时,保护罩2的底部面将逐渐向壳体1移动,同时保护罩2内的滑块201插入壳体1的对应滑槽101内,最终将壳体1罩住;根据需要,所述滑槽101的槽底面两端分别设有一定位孔102,所述保护罩2的外侧面设有能够插入定位孔102内的定位机构10,当定位机构10插入到壳体1顶部处的定位孔102内时,保护罩2为打开状态,壳体1上的oled显示屏4和按键组5为露出状态,能够让操作人员操作,当定位机构10插入到壳体1底部处的定位孔102内时,保护罩2为关闭状态,壳体1将被保护罩2罩住,达到被保护的目的;
20.此外,所述定位机构10包含限位柱1001、定位块1002、支柱1006、翘杆1005和弹簧1004,所述限位柱1001的尾端对应贯穿保护罩2和滑块201后与定位块1002对应铰接,定位块1002配合位于定位孔102内,限位柱1001的柱身直径小于穿过保护罩2和滑块201的通孔直径,限位柱1001的头端柱身环设有挡板1003,且限位柱1001的柱身设有弹簧1004,弹簧1004的两端分别与挡板1003和保护罩2的外侧面对应连接;所述限位柱1001的头端与翘杆1005的尾端对应铰接,翘杆1005的杆身与支柱1006的头端对应铰接,支柱1006对应安装于保护罩2的外侧面,在使用时,通过按下翘杆1005的头端,通过支杆的支撑作用,翘杆1005的尾端则会向远离壳体1方向转动,从而带动限位柱1001向远离壳体1方向移动,最终将定位块1002拉出定位孔102中,此时保护罩2即可沿壳体1的长度方向自由滑动,而当移动到另一定位孔102的位置后,在弹簧1004的弹性形变作用下,将会拉动挡板1003向壳体1方向移动,从而带动限位柱1001和定位块1002向壳体1方向移动,最终定位块1002进入定位孔102中,再次实现定位锁紧。
21.本实用新型未详述部分为现有技术,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型;因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。