1.本实用新型涉及机电技术,尤其涉及蚌线围域扫描及贝壳状物构造机。
背景技术:
2.蚌线又称为尼科米迪斯蚌线,包括直线形成的蚌线是人们最常用的图形,极坐标方程为ρ=aseθ
±
b,直角坐标方程为(x
‑
a)2(x2 y2)=b2x2,是大学和中学生必须掌握的内容,尤其是以蚌线及其他曲线围成的蚌线围域在他在农业、通讯等行业应用非常广泛,而包括蚌线形成的贝壳状物件在制造和建筑行业应用广。方程中有两个参数表观简单实质复杂,致使教师教学或学生学习都存在较大困难,严重影响教学效果。另外,工程设计人员绘制图纸、机械建筑加工人员加工零件等都需要快速便利的专用工具提高效率和精度。
3.为了解决上述问题,近阶段只出现了少数的关于蚌线方面的装置,如,专利申请号为201720119674.2的文献中给出了“一种高等数学绘图仪”,包括主尺、副尺、圆规尺、第一滑块、第二滑块、第三滑块、笔槽和第一螺栓,解决现有技术中,不易保管,以及画图速率较慢的问题,此技术不能用于双参数蚌线围域扫描。专利申请号为201320053477.7的文献中给出了“蚌线空压机”,包括活塞、曲轴,曲轴上活动联接有圆滑块,圆滑块为偏心,其外侧活动联接有活塞,圆滑块处于滑轨中。装置中的三大部件运动规律都是简单回转和直线运动,惯性力在理论上完全平衡,实现了在运动学上的优势。此技术只是利用蚌线特征在功能上有优点,但不能完成贝壳形物件构建。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种具有可对卸料处进行高度调节,适应不同工作环境的蚌线围域扫描及贝壳状物构造机。
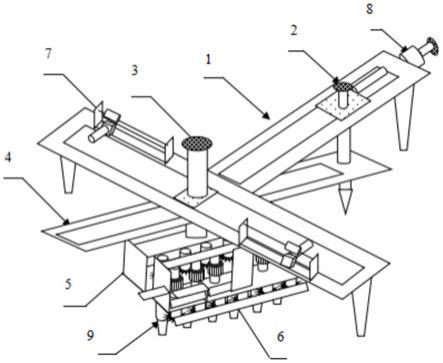
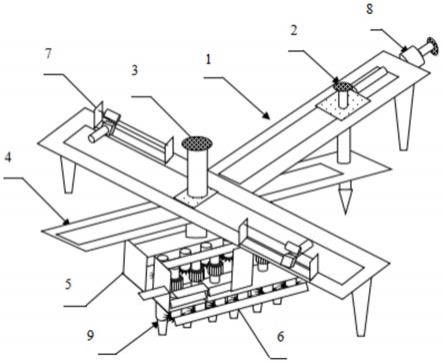
5.本实用新型提供的蚌线围域扫描及贝壳状物构造机包括:支架、极点定位杆、中枢推杆、径向转杆、正交集成器、宽深控制器、拐点调位器、基参数调节器、执行工具,支架1是包括带槽滑杆的丁字支架,分别为横向滑杆和中心滑杆,极点定位杆2通过滑块置于支架的中心滑杆上,中枢推杆滑动连接在支架1的横向滑杆上,径向转杆一端转动连接在极点定位杆下部,另一端滑动连接在中枢推杆上,正交集成器置于中枢推杆下部,宽深控制器和不执行工具分别置于正交集成器上,基参数调节器和拐点调位器分别置于支架的横向滑杆和中心滑杆。
6.进一步技术方案,所述中枢推杆包括第三圆管、第二把手,在内圆轴管第三圆管下端设有固定的第二滑块,矩形的第二滑块侧面有滑槽且设有锁紧装置,在第三圆管上端外壁上设有一体的第五圆管,在第五圆管外壁上设有对称的第二钉孔,在第三圆管内设有轴转的第四圆管,在第四圆管上端设有第二把手,第二把手包括第六圆管和第二销钉,在第六圆管的上下两端管口内分别设有内圆孔不同且固定的第七圆环盘和第八圆环盘,在第六圆管的外壁上分别设有固定且对称的第七圆管和控制键,在第七圆管内设有能插入内部且可回弹的第二销钉,在第二把手上端内圆孔中设有通过第四圆管朝两端射出灯光的第一射
灯,在第二滑块下方第三圆管外壁上分别设有第四圆环盘、第八圆管和第五圆环盘,在第四圆管下部设有第六圆环盘,第六圆环盘内圆孔固定在外壁上位于第三圆管下方。
7.进一步技术方案,所述正交集成器包括集成器架、转动螺副,集成器架包括第四矩形板、第五矩形板、第六矩形板横截面为矩形的框架,第四矩形板和第六矩形板分别为下上底板,两个相同的第五矩形板为左右两端立板,在集成器架内第五矩形板上部设有与底板平行的定向板,在定向板上设有与长度方向一致的多个通透圆孔,在每个通透圆孔侧壁对称位置上分别设有定向滑杆,在光滑硬板第四矩形板中部设有通透圆孔且与定向板上的圆孔中心上下一致,在第四矩形板上面分别设有固定的内圆轴套和限高板框,在矩形限高板框上面设有可拆卸的限位盖板前侧面设有第三刻度,在限位盖板上设有通透圆孔且与第四矩形板上的相对,在每个内圆轴套内设有转动螺副,转动螺副包括第九圆管、内螺纹管、第一齿轮和外螺纹管,在高度与内圆轴套相同的第九圆管内设有一体的内螺纹管,在内螺纹管上部外侧设有固定的第一齿轮,在内螺纹管内设有螺旋转动的外螺纹管,外螺纹管上部外侧螺纹上设有与母线平行的滑槽,转动螺副是将第九圆管置于内圆轴套内形成内轴转动,内螺纹管上下端分别穿过第四矩形板和限位盖板上的通透圆孔,在第六矩形板上设有第三圆孔和矩形杆孔,两个矩形杆孔在第三圆孔的两旁,在第六矩形板下方的各个横板上设有与第三圆孔一致的透光孔。
8.与相关技术相比较,本实用新型提供的蚌线围域扫描及贝壳状物构造机具有如下有益效果:
9.1、本实用新型的蚌线围域扫描及贝壳状物构造机,操作简单,只要推动把手就能完成所有功能。
10.2、蚌线围域扫描及贝壳状物构造机功能齐全:能快速绘制双参数蚌线、一次性扫描闭合蚌线围域、单工序构建贝壳形构件。适用性强:能在任何场合使用。适用于教学、设计、制造、建筑等。
附图说明
11.图1是本实用新型的结构示意图。
12.图2是本实用新型中支架的结构示意图。
13.图3是本实用新型中极点定位杆的结构示意图。
14.图4是本实用新型中中枢推杆的结构示意图。
15.图5是本实用新型中径向转杆的结构示意图。
16.图6是本实用新型中第一离合器的结构示意图。
17.图7是本实用新型中正交集成器的结构示意图。
18.图8是本实用新型中宽深控制器的结构示意图。
19.图9是本实用新型中拐点调位器的结构示意图。
20.图10是本实用新型中基参数调节器的结构示意图。
21.图中标号:1
‑
支架、11
‑
第一矩形板、12
‑
第二矩形板、13
‑
第一槽沟、14
‑
第二槽沟、15
‑
第一刻度、16
‑
第二刻度、17
‑
地脚支板、18
‑
第一圆孔;2
‑
极点定位杆、21
‑
第一圆管、22
‑
第一圆杆、23
‑
第一把手、24
‑
第一滑块、25
‑
第一圆环盘、26
‑
第二圆管、27
‑
第二圆环盘、28
‑
圆锥头、29
‑
第三圆环盘、210
‑
第一弹簧、211
‑
第三槽沟、212
‑
第二圆杆、213
‑
第一销钉;3
‑
中
枢推杆、31
‑
第三圆管、32
‑
第四圆管、33
‑
第二滑块、34
‑
第二把手、35
‑
第一射灯、36
‑
控制键、37
‑
第四圆环盘、38
‑
第八圆管、39
‑
第五圆环盘、310
‑
第六圆环盘、311
‑
第五圆管、312
‑
第二钉孔、341
‑
第六圆管、342
‑
第七圆环盘、343
‑
第七圆管、344
‑
第二销钉、345
‑
第八圆环盘;4
‑
径向转杆、41
‑
第三矩形板、42
‑
第三滑块、43
‑
第三槽沟、44
‑
第二圆孔、45
‑
第一离合器、451
‑
离合器箱架、452
‑
四棱柱销杆、453
‑
第一梯形楔块、454
‑
横向销杆、455
‑
第二弹簧;5
‑
正交集成器、51
‑
集成器架、52
‑
定向板、53
‑
限高板框、54
‑
内圆轴套、55
‑
转动螺副、57
‑
第三圆孔、58
‑
矩形杆孔、511
‑
第四矩形板、512
‑
第五矩形板、513
‑
第六矩形板、521
‑
定向滑杆、531
‑
限位盖板、532
‑
第三刻度、551
‑
第九圆管、552
‑
内螺纹管、553
‑
第一齿轮、554
‑
外螺纹管;6
‑
宽深控制器、61
‑
控制器支架、62
‑
第二圆杆、63
‑
第十圆管、64
‑
第二离合器、65
‑
第三圆杆、66
‑
第一齿带、67
‑
第二齿带、68
‑
第三齿带、69
‑
第四齿带、621
‑
第一电机、622
‑
第一齿带轮、623
‑
第二齿带轮、641
‑
第四圆杆、642
‑
第二齿轮、643
‑
第三弹簧、644
‑
第九圆环盘、645
‑
第十圆环盘、646
‑
第五圆杆、647
‑
三棱柱楔块、651
‑
第二电机;7
‑
拐点调位器、71
‑
调位器底板、72
‑
带槽滑板、73
‑
第一螺杆、74
‑
转叶飞轮、75
‑
第二梯形楔块、711
‑
调位器立板、712
‑
调位器滑道、721
‑
直角滑道、722
‑
第一挡板、723
‑
矩形连杆、724
‑
弹性板条、725
‑
第二挡板、741
‑
转动叶片、742
‑
第十一圆管、743
‑
第十一圆环盘、744
‑
第十二圆管、745
‑
第一螺母、751
‑
第四弹簧、752
‑
第三挡板、753
‑
刮板;8
‑
基参数调节器、81
‑
第二螺母、82
‑
第二螺杆、83
‑
第十二圆环盘、84
‑
第十三圆环盘、85
‑
第十三圆管、86
‑
手柄;9
‑
执行工具、91
‑
刮擦切类工具、92
‑
喷洒类工具、93
‑
填补类工具。
具体实施方式
22.下面结合附图和实施方式对本实用新型作进一步说明。
23.如图1
‑
10所示,蚌线围域扫描及贝壳状物构造机,包括:支架1、极点定位杆2、中枢推杆3、径向转杆4、正交集成器5、宽深控制器6、拐点调位器7、基参数调节器8、执行工具9。支架1是包括带槽滑杆的丁字支架,分别为横向滑杆和中心滑杆,极点定位杆2通过滑块置于支架1的中心滑杆上,中枢推杆3滑动连接在支架1的横向滑杆上,径向转杆4一端转动连接在极点定位杆2下部,另一端滑动连接在中枢推杆3上,正交集成器5置于中枢推杆3下部,宽深控制器6和不止一个执行工具9分别置于正交集成器5上,基参数调节器8和两个拐点调位器7分别置于支架1的横向滑杆和中心滑杆。
24.如图2所示,支架1包括第一矩形板11、第二矩形板12、地脚支板17,所述第一矩形板11为横向滑杆,所述第二矩形板12中心滑杆,在第一矩形板11上分别设有与长边一致的第一槽沟13和第一刻度15,在第一槽沟13一端内侧中部设有第一圆孔18,第一圆孔18与第一矩形板11的后端相通,在第一矩形板11的前端设有第二矩形板12,在第二矩形板12上分别设有与长边一致的第二槽沟14和第二刻度16,第二矩形板12与第一矩形板11形成丁字型板架,在丁字型板架下面三个外端分别设有地脚支板17。
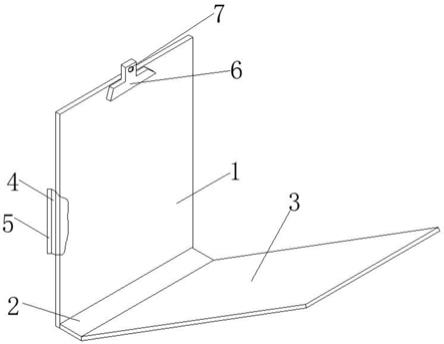
25.如图3所示,极定位杆2包括第一圆管21、第一圆杆22、第一把手23,在第一圆管21外壁中下部依次设有第一销钉213、第一滑块24、第一圆环盘25、第二圆管26、第二圆环盘27,第一滑块24是侧面有槽沟的矩形板块且垂直固定在第一圆管21上,第一圆环盘25和第二圆环盘27的内圆孔固定在第一圆管21上,第二圆管26套在第一圆环盘25和第二圆环盘27之间成为轴套,在第一销钉213上部的第一圆管21外壁上设有第三槽沟211,在两个对称的
第三槽沟211中分别设有活动的第二圆杆212,在第一圆管21管内两个第二圆杆212的内端设有固定的第三圆环盘29,在第三圆环盘29的内圆孔中设有固定的第一圆杆22,在第三圆环盘29下面第一圆杆22下端设有固定的圆锥头28,在第三圆环盘29上面第一圆杆22外设有螺旋式的第一弹簧210,第一弹簧210的下端固定在第三圆环盘29上,在第一弹簧210的上端设有固定的第一把手23,第一把手23是硬板圆盘,第一把手23下圆面固定在第一圆管21上端,上拉第二圆杆212圆锥头28能缩进第一圆管21内并用第一销钉213固定,松开第一销钉213圆锥头28能伸出第一圆管21外。
26.如图4所示,中枢推杆3包括第三圆管31、第二把手34,在内圆轴管第三圆管31下端设有固定的第二滑块33,矩形的第二滑块33侧面有滑槽且设有锁紧装置,在第三圆管31上端外壁上设有一体的第五圆管311,在第五圆管311外壁上设有对称的第二钉孔312,在第三圆管31内设有轴转的第四圆管32,在第四圆管32上端设有第二把手34,第二把手34包括第六圆管341、第二销钉344,在第六圆管341的上下两端管口内分别设有内圆孔不同且固定的第七圆环盘342和第八圆环盘345,在第六圆管341的外壁上分别设有固定且对称的第七圆管343和控制键36,在第七圆管343内设有能插入内部且可回弹的第二销钉344。第二把手34是将第七圆环盘342的内圆孔固定在第四圆管32上,第八圆环盘345套挡在第五圆管311下端面,第二销钉344深入时能插进第二钉孔312内锁紧,第二销钉344弹出时第二把手34能绕第五圆管311转动。在第二把手34上端内圆孔中设有通过第四圆管32朝两端射出灯光的第一射灯35。在第二滑块33下方第三圆管31外壁上分别设有第四圆环盘37、第八圆管38、第五圆环盘39,第八圆管38在固定的第四圆环盘37和第七圆环盘39之间成为轴套。在第四圆管32下部设有第六圆环盘310,第六圆环盘310内圆孔固定在外壁上位于第三圆管31下方。
27.如图5所示,径向转杆4包括第三矩形板41、第一离合器45,在第三矩形板41上分左右设有第二圆孔44和同向的第三槽沟43,在第三槽沟43内设有第三滑块42,在第三滑块42上分别设有圆孔和第一离合器45。
28.如图6所示,第一离合器45包括离合器箱架451、四棱柱销杆42,离合器箱架451是长方体形箱架,在离合器箱架451左右立板中部分别设有相同且相对的圆槽沟,在离合器箱架451上下底板中部分别设有相同且相对的矩形槽沟,在矩形槽沟内设有滑动连接的四棱柱销杆42,在四棱柱销杆42上端设有固定的圆钮,在离合器箱架451内四棱柱销杆42与立板相对的一个侧面上设有第一梯形楔块453,第一梯形楔块453是横截面为直角梯形的正柱体,第一梯形楔块453的长边底面固定在四棱柱销杆42上,在第一梯形楔块453的外侧面上设有滑动的横向销杆454,横向销杆454的外端穿过离合器箱架451同侧立板上的圆槽沟,在离合器箱架451内横向销杆454上套接有第二弹簧455,第二弹簧455一端固定在横向销杆454上另一端固定在离合器箱架451立板上,在四棱柱销杆42的另一相对侧面有相同的设置。
29.如图7所示,正交集成器5包括集成器架51、转动螺副55,集成器架51包括第四矩形板511、第五矩形板512、第六矩形板513横截面为矩形的框架,第四矩形板511和第六矩形板513分别为下上底板,两个相同的第五矩形板512为左右两端立板。在集成器架51内第五矩形板512上部设有与底板平行的定向板52,在定向板52上设有与长度方向一致的多个通透圆孔,在每个通透圆孔侧壁对称位置上分别设有定向滑杆521。在光滑硬板第四矩形板511中部设有通透圆孔且与定向板52上的圆孔中心上下一致,在第四矩形板511上面分别设有
固定的内圆轴套54和限高板框53,内圆轴套54在每个通透圆孔外,矩形限高板框53在所有的内圆轴套54外且高度相同,在矩形限高板框53上面设有可拆卸的限位盖板531前侧面设有第三刻度532,在限位盖板531上设有通透圆孔且与第四矩形板511上的相对。在每个内圆轴套54内设有转动螺副55,转动螺副55包括第九圆管55、内螺纹管552、第一齿轮553、外螺纹管554,在高度与内圆轴套54相同的第九圆管55内设有一体的内螺纹管552,在内螺纹管552上部外侧设有固定的第一齿轮553,在内螺纹管552内设有螺旋转动的外螺纹管554,外螺纹管554上部外侧螺纹上设有与母线平行的滑槽,转动螺副55是将第九圆管55置于内圆轴套54内形成内轴转动,内螺纹管552上下端分别穿过第四矩形板511和限位盖板531上的通透圆孔,第一齿轮553在限位盖板531外部,内螺纹管552上端穿过定向板52上通透圆孔,定向滑杆521滑动连接在外螺纹管554的滑槽中。在第六矩形板513上设有第三圆孔57和矩形杆孔58,两个矩形杆孔58在第三圆孔57的两旁,在第六矩形板513下方的各个横板上设有与第三圆孔57一致的透光孔。
30.如图8所示,宽深控制器6包括控制器支架61、第二离合器64,控制器支架61是截面为矩形的框架,在控制器支架61上下底板的一端设有转动的第二圆杆62,在控制器支架61外部第二圆杆62上下两端依次分别设有轴向连接的第一电机621和转动连接的第二齿带轮623,在控制器支架61内第二圆杆62上设有固定的第一齿带轮622,在第一齿带轮622下端设有一体的圆环盘托板。在控制器支架61上下底板另一端设有转动的第三圆杆65,在控制器支架61上下底板外部第三圆杆65上下端分别设有轴向连接的第二电机651和固定的第二齿带轮623,在第三圆杆65中部设有套接的第十圆管63,第十圆管63两端固定在控制器支架61上下底板上,在第十圆管63上设有转动的第一齿带轮622,在两个第一齿带轮622上设有闭合的第一齿带66,在第一齿带66的上边沿设有固定的第二齿带67和第三齿带68,第二齿带67与第一齿带66的材质、齿条高度等一样,第二齿带67展成平面后呈等腰梯形,长底边长度不超过第一齿带66周长的四分之一,第二齿带67的长底边同齿向固定连接在第一齿带66上并能与第一齿带轮622啮合,第三齿带68与第二齿带67相同且相对。在控制器支架61中第二圆杆62和第十圆管63间的连线上设有第二离合器64,第二离合器64包括第四圆杆641、第二齿轮642、三棱柱楔块647,在第四圆杆641上自上而下依次设有第三弹簧643、第九圆环盘644、第二齿轮642、第十圆环盘645、第二齿带轮623,第九圆环盘644和第十圆环盘645的内圆孔滑动套在第四圆杆641上,螺旋式第三弹簧643下端固定在第九圆环盘644上面,第二齿轮642能沿母线方向滑动连接并随第四圆杆641一起转动,第二齿带轮623固定在第四圆杆641下端,在第十圆环盘645上分别设有小圆孔和三棱柱楔块647,至少一个小圆孔在外边缘,在小圆孔中设有滑动连接的第五圆杆646,三棱柱楔块647是一三棱柱截段,一个侧面固定在第十圆环盘645下面外边沿且下面的棱沿径向向外。第二离合器64是将第四圆杆641转动连接在控制器支架61的上下底板上,第三弹簧643上端固定在上底板上,第五圆杆646下端垂直固定在控制器支架61下底板上面,第十圆环盘645和第二齿带轮623分别在控制器支架61下底板的上方和下方,至少四个第二离合器64对称的置于控制器支架61上,左方相邻的第二离合器64上的三棱柱楔块647与右方相邻的第二离合器64上的三棱柱楔块647方向相反,下部棱线都指向外方且与第三齿带68上边滑动连接。在所有的第二齿带轮623上设有闭合的第四齿带69。
31.如图9所示,拐点调位器7包括调位器底板71、带槽滑板72、第一螺杆73、转叶飞轮
74、第二梯形楔块75,在矩形的调位器底板71上面分别设有调位器立板711和调位器滑道712,调位器滑道712在中部沿长度方向,两块调位器立板711分别垂直固定在调位器滑道712的两端,在两块调位器立板711的上部设有固定的第一螺杆73,在第一螺杆73上设有转叶飞轮74,转叶飞轮74包括第一螺母745、转动叶片741,在第一螺母745圆柱面侧壁上设有转动叶片741,转动叶片741是矩形薄硬板,转动叶片741的一端有折页与第一螺母745圆柱面母线转动连接,转动叶片741一侧设有弹簧和软线与第一螺母745侧壁相连,在无弹簧一侧推动转动叶片741能压缩弹簧转动,停止推动转动叶片741能自动张开至软线伸直。在第一螺母745的右端管头设有固定的第十一圆管742,第十一圆管742套在第一螺杆73外且不相接触,在第十一圆管742外端外壁上分别设有固定的第十一圆环盘743和转动的第十二圆管744,第十二圆管744在两个阻挡盘第十一圆环盘743之间成为轴套,转叶飞轮74是将第一螺母745螺纹转动连接在第一螺杆73上。在第十二圆管744上设有垂直且固定的矩形连杆723,在矩形连杆723下端设有固定的带槽滑板72,带槽滑板72是下面设有凹槽的矩形硬板且滑动连接在调位器滑道712上,在带槽滑板72上面分别设有直角滑道721、第一挡板722、弹性板条724,矩形板条状的第一挡板722垂直固定在带槽滑板72的后边棱并与下面的凹槽平行,在第一挡板722上设有矩形槽沟,在第一挡板722的矩形槽沟中设有弹性板条724,在弹性板条724的上面第一挡板722前面设有固定垂直的第二挡板725,弹性板条724的前端固定在带槽滑板72上,弹性板条724外端弹起处在第一挡板722矩形槽沟最高位置时,第二挡板725的上端能插入到相邻两片转动叶片741之间并能阻挡其转动,弹性板条724外端弹起处在第一挡板722矩形槽沟较低位置时,第二挡板725的上端与转动叶片741不相接触。直角滑道721是三块同长矩形板围成的截面为u形凹槽滑道,固定在带槽滑板72上的两根直角滑道721后端与第一挡板722两端垂直相连,其中一根位于弹性板条724左边另一根位于弹性板条724和矩形连杆723之间。在两根直角滑道721相对的凹槽内设有滑动连接的第二梯形楔块75,第二梯形楔块75是横截面为直角梯形的正柱体,在第二梯形楔块75后端的直腰侧面上设有固定的第四弹簧751,螺旋式的第四弹簧751后端固定在第一挡板722上,在第二梯形楔块75左侧长底边前端设有同向的第三挡板752,在第二梯形楔块75上面设有固定的刮板753,当刮板753处在转动叶片741的下方时其上端能插入到相邻两片转动叶片741之间。
32.如图10所示,基参数调节器8包括第二螺母81、第二螺杆82,在第二螺母81内设有螺旋转动的第二螺杆82,在第二螺杆82有螺纹一端设有手柄86,在第二螺杆82无螺纹一端的外壁上分别设有第十二圆环盘83和第十三圆环盘84,第十三圆环盘84转动套在第二螺杆82上,外半径在第十三圆环盘84两个半径之间的两个第十二圆环盘83的内圆周固定在第二螺杆82上并成为阻挡盘,在第十三圆环盘84的外圆周上设有固定第十三圆管85。
33.本实用新型提供的蚌线围域扫描及贝壳状物构造机的工作原理如下:
34.本实用新型的蚌线围域扫描及贝壳状物构造机的工作原理是:根据过圆心转动割线上定长线段的中心沿定切线运动形成两只径向对称的曲线,利用变径补转技术实现曲线的闭合,借助等高线方法通过双参数差位系列取值一次性完成渐次包含的贝壳形物件的构建。
35.本实用新型的蚌线围域扫描及贝壳状物构造机,具有一次性连续扫描闭合蚌线围域的功能,操作步骤是:
36.一、仪器组装:1]把支架1置于平台上,调整地脚支板17使其处于平稳状态。2]把极
点定位杆2置于支架1上且将圆锥头28缩进用第一销钉213固定。3]把基参数调节器8置于支架1上并与极点定位杆2连接后。4]把两个拐点调位器7置于支架1上。5]把中枢推杆3置于支架1上并锁定第二滑块33在两个拐点调位器7之间。6]将至少一个第一离合器45置于径向转杆4上,把径向转杆4置于极点定位杆2和中枢推杆3上。7]将所有转动螺副55下端在水平线上的正交集成器5置于中枢推杆3上,用第一离合器45固定使其与径向转杆4上下一致且成为一体,用第二销钉344锁定第二把手34。8]把宽深控制器6上的三棱柱楔块647都处在第一齿带66上,即第二齿带67和第三齿带68上都没有接触三棱柱楔块647,再将宽深控制器6置于正交集成器5上。9]确定执行工具9,从刮擦切类工具91中选择足够多的扫描刷置于正交集成器5上,把装有宽深控制器6及执行工具9的正交集成器5合称为双控扫描器。
37.二、符号设置:1]蚌线:又称为尼科米迪斯蚌线,极坐标方程为ρ=asecθ
±
b,直角坐标方程为(x
‑
a)2(x2 y2)=b2x2,a为第一参数b为第二参数。2]轨迹特征,设方程为x=a的直线c和一个定点o,过点o引一束射线,并且在每一条射线l上从它和直线c的交点p向两边作等长为b的线段,线段的内端点m和外端点q的轨迹就是蚌线,即om=op
‑
b,oq=op b,m的轨迹称为内支线,q的轨迹称为外支线,内支线顶点a(a
‑
b,0),外支线顶点b(a b,0),拐点是方程x2‑
a2x 2a(a2‑
b2)=0的最大或第二根,直线c是内外支线的渐近线。3]闭合蚌线围域:由部分内外支线及射线l上两个拐点间外用近似椭圆弧连线形成的闭合对称曲线围成的平面区域。4]贝壳状物:开口曲线是闭合蚌线的贝壳形空间区域,由一系列平行平面上两个参数取不同数组形成的闭合蚌线上下连接而成,就像蚌虫每年完成一层从小到大逐步外延。5]极点定位杆2上圆锥头28的中心线上各点在图板上的投影表示点o。6]第一矩形板11上第一槽沟13的中心线表示极轴或内外支蚌线的对称轴。7]第二矩形板12上第二槽沟14的中心线表示直线c,第四圆管32中心线上的点表示交点p,用第一射灯35光束中心点的投影表示。8]正交集成器5上所有外螺纹管554中心线上的点分别表示第一参数不变第二参数取系列值下不同蚌线上的点,这些点的连线称为扫描线段,用执行工具中排刷连成的对称长排刷来实现线段扫描,最外端的两个是蚌线内外支线上动点m和q。9]拐点调位器7上第二梯形楔块75中心值表示动点m或q处在蚌线拐点时射线l上交点p在第二刻度16上的位置值。10]正交集成器5在动点m或q处在蚌线拐点时的定轴转动,在射线l外面的部分表示变半径扇形闭合扫描,通过转动中枢推杆3上第二把手34得以实现。11]坐标系为oxy。12]第一刻度15与坐标系oxy的横轴一致,零刻度点位于外端。13]第二刻度16与坐标系oxy的纵轴oy平行且方向一致,零刻度点p0位于第一刻度15的延长线上,坐标为(d,0)(d>a)。14]第三刻度532的零刻度点与点上下p0一致。15]控制键36中分为第二参数键和进深键,第二参数键能控制第一齿带66双向转动,逆时针转动调节两个外半径点,顺时针转动调节两个内半径点。进深键能控制第四齿带69双向转动,逆时针转动执行工具9下移,顺时针升高。16]蚌线围域扫描及贝壳状物构造机用字母v代表。
38.三、初始位置调整:1]确定第一参数a和第二参数b的值。2]转动基参数调节器8上手柄86将极点定位杆2移动至第一刻度15的零点处,把第一滑块24固定在第一矩形板11上。3]分别将两个拐点调位器7移动至拐点对应的位置处,把转叶飞轮74上转动叶片741外端半径缩小使其脱离刮板753的刮带,oy正向的记为第一拐点调位器7,负向处的记为第二拐点调位器7。4]解锁第二滑块33把中枢推杆3移至中心线位于第二刻度16的零点处后再锁定。5]用控制键36中第二参数键调整第一齿带66上转动,调节两个外半径点m和q位于第三刻度
532的
±
b值处,用进深键调节两个外半径点之间的执行工具下移与外部的有一定距离后停止。6]关闭第一射灯35和控制电源。
39.四、围域扫描:对于a>b,1]将画有坐标系oxy,方程为x=a的直线c,c与轴ox交点p0(a,0),内支线顶点a(a
‑
b,0),外支线顶点b(a b,0)的纸张s固定在平板上。2]松开第一销钉213将极点定位杆2上圆锥头28伸出,打开第一射灯35及控制电源。3]将v置于s上,圆锥头28对准顶点o后用第一销钉213固定,第一射灯35的光线对准点p0。4]将m和q点间的执行工具置于s上线段ab上部校正好位置。5]锁定地脚支板17使v处于平稳状态。6]解锁第二滑块33。一手按住第一把手23使支架处于固定状态,一手抓住第二把手34沿oy正向推动到达第一拐点调位器7受阻时停止,锁紧第二滑块33,上拉第一离合器45上的四棱柱销杆42锁定第三滑块42并解锁双控扫描器。7]用进深键将m和q间的扫描刷与s接触,点m和q在s上的点分别为m1和q1。8]将第二销钉344弹出抓住第二把手34转动,同时用第二参数键调整扫描半径,使双控扫描器在内外支线外部扫描出近似椭圆的连通区域m1e1q1。9]当第二把手34转到半周即双控扫描器上的扫描刷与s上的m1q1重合时停止,分别用第二销钉344和第一离合器45上使其重新固定恢复到转动前状态。10]解锁第二滑块33,抓住第二把手34沿oy负向推动,扫描刷离开m1q1以直线c为中线进行等长线段旋转式扫描,有色区域的内外边界线为蚌线。11]当第一射灯35的光线回到点p0时,双控扫描器上的扫描刷与s上线段ab重合,完成上部分区域扫描。12]继续推动第二把手34沿oy负向移动,到达第二拐点调位器7时m和q在s上的点分别为m2和q2,在此用扫描m1e1q1的方法在内外支线外部扫描出连通域m2e2q2,完成上部分区域扫描。13]将v从s上移开。14]在s上扫描出连续完整且对称的闭合蚌线围域m1am2e2q2bq1e1m1。
40.对于a=b,a<b与a>b相似,只是在结点处用第二圆杆212及时把圆锥头28升降避开与扫描刷的冲突。
41.五、扫描结束:将装置v恢复到初始状态。
42.本实用新型的蚌线围域扫描及贝壳状物构造机,具有在厚板上刻挖出蚌壳状凹槽的功能,操作步骤是:
43.一、仪器组装:1]
‑
8]与具有一次性连续扫描闭合蚌线围域的功能相同。9]确定执行工具9,从刮擦切类工具91中选择足够多的切割刀具置于正交集成器5上,把装有宽深控制器6及执行工具9的正交集成器5合称为双控切割器。
44.二、符号设置:与具有一次性连续扫描闭合蚌线围域的功能相同。
45.三、初始位置调整:与具有一次性连续扫描闭合蚌线围域的功能相同。
46.四、贝壳凹槽刻挖:对于a>b,1]预制贝壳凹槽最大开口区域图形,将画有坐标系oxy,方程为x=a的直线c,c与轴ox交点p0(a,0),内支线顶点a(a
‑
b,0),外支线顶点b(a b,0)等特征的纸张固定在要刻挖的厚板s上,或者直接在要刻挖的厚板s上绘制凹槽最大开口区域。2]
‑
12]与具有一次性连续扫描闭合蚌线围域的功能相同。13]在s上刻挖出一定深度的连续完整且对称的上截面为闭合蚌线围域m1am2e2q2bq1e1m1的浅凹槽。14]把转叶飞轮74上转动叶片741恢复到原状态使其能被刮板753的刮带。15]用宽深控制器6中的第二参数键适当调小第二参数b的值,用进深键将调小后的m和q间的执行工具适当向下移一个深度,点m和q在s上的点分别为m3和q3。16]仿照刻挖m1am2e2q2bq1e1m1的方法在其内刻挖出外边较小深度加深的闭合蚌线围域m3e3q3q4e4m4m3的浅凹槽。17]进行多次的缩小性刻挖会得到所需要的贝壳凹槽。18]将v从s上移开。
47.五、绘图结束:将装置v恢复到初始状态。
48.本实用新型的蚌线围域扫描及贝壳状物构造机,具有喷洒蔓叶线图案的功能,操作步骤中执行工具选择喷洒类工具92即可,其他与蚌线围域扫描相同。
49.本实用新型的蚌线围域扫描及贝壳状物构造机,具有用速凝剂浇筑贝壳状物的功能,操作步骤中执行工具选择填补类工具93即可,其他与在厚板上刻挖出蚌壳状凹槽相同,只是用进深键进行升高性控制。
50.本实用新型蚌线围域扫描及贝壳状物构造机的经济价值和应用前景:随着技术进步和经济发展,越来越需要先进的装备提高工作效率和制件精度,急需一种操作简单使用方便的蚌线围域扫描及贝壳状物构造机,仅国内高等学校有几千所,还有众多的建筑、制造企业,设计装饰公司,数量相当可观,其市场前景非常广阔,具有良好的经济收益和社会效益。
51.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。