1.本实用新型涉及医疗设备技术领域,具体为一种微创外科机器人手术用自锁持针器。
背景技术:
2.机器人手术系统是集多项现代高科技手段于一体的综合体。主要用于心脏外科和前列腺切除术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具,主要由控制台和操作臂组成,控制台由计算机系统、手术操作监视器、机器人控制监视器、操作手柄和输入输出设备等组成。手术时外科医生可坐在远离手术台的控制台前,头靠在视野框上,双眼接受来自不同摄像机的完整图像,共同合成术野的三维立体图,医生双手控制操作杆,手部动作传达到机械臂的尖端,完成手术操作,从而增加操作的精确性和平稳性,现有的机械臂不能够进行灵活的伸缩,需要人力操作机械臂的长度,而且手术时由于针受力方向不同,锁针器经常出现针掉落的情况,不能够更好的进行对针的夹持。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本实用新型提供了一种微创外科机器人手术用自锁持针器,解决了上述背景技术中提出的现有的医疗设备实际中现有的机械臂不能够进行灵活的伸缩,需要人力操作机械臂的长度,而且手术时由于针受力方向不同,锁针器经常出现针掉落的情况,不能够更好的进行对针的夹持的问题。
5.(二)技术方案
6.为实现以上目的,本实用新型通过以下技术方案予以实现:
7.一种微创外科机器人手术用自锁持针器,包括安装件,所述安装件的顶端设置有第三套筒,所述第三套筒的一外侧壁连接有连接件,所述连接件远离第三套筒的一端连接有可调节弯带,所述可调节弯带的顶端连接有消毒喷洒口,所述第三套筒的顶端设置有第二套筒,所述第二套筒的顶部设置有第一套筒,所述第一套筒的顶部设置有夹持件,所述夹持件的内壁设置有旋转轴,所述旋转轴的顶部连接有夹持端。
8.进一步的,所述夹持端的顶壁设置有限位圈,且限位圈与夹持端可拆卸连接。
9.进一步的,所述限位圈的内侧壁设置有多个夹持块,每个所述夹持块的顶端均设置有紧固凸齿。
10.进一步的,所述第三套筒套接在第二套筒的外部,且第三套筒的侧壁开设有与连接件位置相对应的孔。
11.进一步的,所述第二套筒套接在第一套筒的外部。
12.进一步的,所述第一套筒收缩到第二套筒的内部,所述第二套筒可收缩到第三套筒的内部。
13.进一步的,所述消毒喷洒口与收缩后的夹持端位置相对应。
14.(三)有益效果
15.本实用新型提供了一种微创外科机器人手术用自锁持针器,具备以下有益效果:
16.(1)、该微创外科机器人手术用自锁持针器,通过使用套筒,可以通过电脑控制进行灵活收缩,不需要人力操作机械臂的长度的问题。
17.(2)、该微创外科机器人手术用自锁持针器,通过在夹持端设置多个夹持块和紧固凸齿,在手术时针受力方向不同,锁针器不会出现针掉落的情况,可以更好的进行对针的夹持。
18.(3)、该微创外科机器人手术用自锁持针器,通过在套筒上设置消毒喷洒口,可以在手术结束后对收缩完的夹持端进行消毒。
附图说明
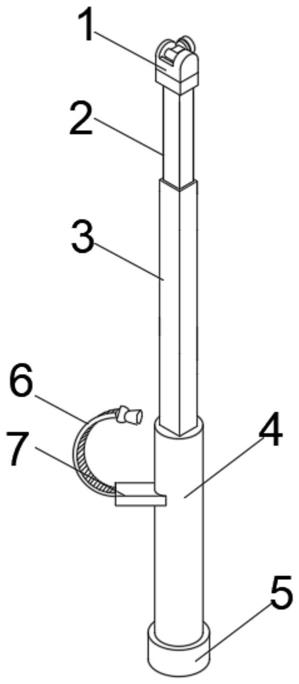
19.图1为本实用新型微创外科机器人手术用自锁持针器的主视结构示意图;
20.图2为本实用新型微创外科机器人手术用自锁持针器的夹持端主视结构示意图;
21.图3为本实用新型微创外科机器人手术用自锁持针器的夹持件正视结构示意图;
22.图4为本实用新型微创外科机器人手术用自锁持针器的消毒喷洒口局部放大结构示意图。
23.图中:夹持件1,第一套筒2,第二套筒3,第三套筒4,安装件5,可调节弯带6,连接件7,消毒喷洒口8,夹持端9,限位圈901,夹持块902,紧固凸齿903,旋转轴10。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
25.请参阅图1
‑
4,本实用新型提供一种技术方案:
26.一种微创外科机器人手术用自锁持针器,包括安装件5,安装件5的顶端设置有第三套筒4,第三套筒4的一外侧壁连接有连接件7,连接件7远离第三套筒4的一端连接有可调节弯带6,可调节弯带6的顶端连接有消毒喷洒口 8,第三套筒4的顶端设置有第二套筒3,第三套筒4套接在第二套筒3的外部,且第三套筒4的侧壁开设有与连接件7位置相对应的孔,第二套筒3的顶部设置有第一套筒2,第二套筒3套接在第一套筒2的外部,第一套筒2收缩到第二套筒3的内部,第二套筒3可收缩到第三套筒4的内部,第一套筒2 的顶部设置有夹持件1,夹持件1的内壁设置有旋转轴10,旋转轴10的顶部连接有夹持端9,消毒喷洒口8与收缩后的夹持端9位置相对应,夹持端9的顶壁设置有限位圈901,且限位圈901与夹持端9可拆卸连接,限位圈901的内侧壁设置有多个夹持块902,每个夹持块902的顶端均设置有紧固凸齿903。
27.工作原理,该微创外科机器人手术用自锁持针器,在使用时将需要用到的针放置到夹持件(902)内壁,紧固凸齿903对针进行夹紧,第一套筒2和第二套筒3可以拉伸到需要的长度,在手术时可以通过旋转轴10对针进行角度调节,在手术结束后第一套筒2和第二套筒3进行收缩,消毒喷洒口8对夹持端9进行消毒。
28.需要说明的是,在本实用新型中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
29.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种微创外科机器人手术用自锁持针器,包括安装件(5),其特征在于,所述安装件(5)的顶端设置有第三套筒(4),所述第三套筒(4)的一外侧壁连接有连接件(7),所述连接件(7)远离第三套筒(4)的一端连接有可调节弯带(6),所述可调节弯带(6)的顶端连接有消毒喷洒口(8),所述第三套筒(4)的顶端设置有第二套筒(3),所述第二套筒(3)的顶部设置有第一套筒(2),所述第一套筒(2)的顶部设置有夹持件(1),所述夹持件(1)的内壁设置有旋转轴(10),所述旋转轴(10)的顶部连接有夹持端(9)。2.根据权利要求1所述的一种微创外科机器人手术用自锁持针器,其特征在于,所述夹持端(9)的顶壁设置有限位圈(901),且限位圈(901)与夹持端(9)可拆卸连接。3.根据权利要求2所述的一种微创外科机器人手术用自锁持针器,其特征在于,所述限位圈(901)的内侧壁设置有多个夹持块(902),每个所述夹持块(902)的顶端均设置有紧固凸齿(903)。4.根据权利要求1所述的一种微创外科机器人手术用自锁持针器,其特征在于,所述第三套筒(4)套接在第二套筒(3)的外部,且第三套筒(4)的侧壁开设有与连接件(7)位置相对应的孔。5.根据权利要求1所述的一种微创外科机器人手术用自锁持针器,其特征在于,所述第二套筒(3)套接在第一套筒(2)的外部。6.根据权利要求1所述的一种微创外科机器人手术用自锁持针器,其特征在于,所述第一套筒(2)收缩到第二套筒(3)的内部,所述第二套筒(3)可收缩到第三套筒(4)的内部。7.根据权利要求1所述的一种微创外科机器人手术用自锁持针器,其特征在于,所述消毒喷洒口(8)与收缩后的夹持端(9)位置相对应。
技术总结
本实用新型涉及医疗设备技术领域,且公开了一种微创外科机器人手术用自锁持针器,包括安装件,所述安装件的顶端设置有第三套筒,所述第三套筒的一外侧壁连接有连接件,所述连接件远离第三套筒的一端连接有可调节弯带,所述第三套筒的顶端设置有第二套筒,所述第二套筒的顶部设置有第一套筒,所述第一套筒的顶部设置有夹持件。该微创外科机器人手术用自锁持针器,通过使用套筒,可以通过电脑控制进行灵活收缩,不需要人力操作机械臂的长度的问题,通过在夹持端设置多个夹持块和紧固凸齿,在手术时针受力方向不同,锁针器不会出现针掉落的情况,通过在套筒上设置消毒喷洒口,可以在手术结束后对收缩完的夹持端进行消毒。结束后对收缩完的夹持端进行消毒。结束后对收缩完的夹持端进行消毒。
技术研发人员:张小平 王伟 王代宏 冉茂建
受保护的技术使用者:张小平
技术研发日:2020.12.15
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。