1.本发明涉及通信技术领域,特指一种停车场用的智能转角镜及提示系统与方法。
背景技术:
2.在智慧社区、园区、酒店等智慧空间场景下,智慧停车场、智能停车引导等行车相关功能越来越受到业主及管理公司关注。目前在停车场的各个车位处均设置有传感器以检测车位上是否有车辆停放,若有车辆停放则亮红灯,若没有车辆停放则亮绿灯,车辆在停车场内行驶时,可观看到视觉范围内的车位状态,从而引导车辆找到空车位进行停放。但由于车辆只可以看到一排车位的情况,在车辆转弯的过程中无法分清该路口是否有剩余车位,且停车场通常处于车位难求的状态,就使得车位往往需要寻找很久。
技术实现要素:
3.本发明的目的在于克服现有技术的缺陷,提供一种停车场用的智能转角镜及提示系统与方法,解决现有的车位检测传感器只让车辆方便的看到一排车位的情况,无法分清路口是否有车位剩余从而导致车位寻找时间久的问题。
4.实现上述目的的技术方案是:
5.本发明提供了一种停车场用的智能转角镜,包括:
6.镜体;
7.显示屏,设于所述镜体上;以及
8.通信模块,设于所述镜体上,所述通信模块与所述显示屏连接,所述通信模块还与云端连接以接收停车场的剩余车位信息并发送给所述显示屏进行显示。
9.本发明的智能转角镜能够显示停车场的剩余车位信息,为车辆提供指引作用,能够节省车位寻找时间,可有效的引导车辆快速寻找车位。本发明通过云端统计目前车位状态,并将剩余车位信息通过智能转角镜上的显示屏进行显示。停车场内安装的智能转角镜不仅能够提供转角路况查看的功能,还能够提供车位信息指引的功能,为人们提供了方便,还提高了业主的停车体验。
10.本发明停车场用的智能转角镜的进一步改进在于,还包括设于所述镜体两侧的距离探测装置,所述距离探测装置用于探测其距所述镜体两侧的移动车辆的距离形成距离信息,并发送给所述显示屏进行显示。
11.本发明还提供了一种利用上述的停车场用的智能转角镜的提示方法,包括如下步骤:
12.实时监测所述停车场内各车位的状态并将监测得到的各车位实时状态上传至云端;
13.对所述云端处的各车位实时状态进行分析以得到剩余车位信息;以及
14.将所得到的剩余车位信息发送给智能转角镜并通过对应的显示屏予以显示。
15.本发明的提示方法的进一步改进在于,还包括:
16.将所述停车场内的车位与智能转角镜进行对应的位置关联;
17.在分析剩余车位时,统计每一智能转角镜处与其位置关联的剩余车位信息并通过对应的显示屏进行显示。
18.本发明的提示方法的进一步改进在于,还包括:
19.判断与智能转角镜位置关联的剩余车位数量是否大于3个,若是则通过对应的显示屏显示剩余车位数量;
20.若否,则通过对应的显示屏显示剩余车位数量及剩余车位编码。
21.本发明的提示方法的进一步改进在于,还包括:
22.实时探测所述转角智能镜的两侧道路上是否有车辆,若是则探测所述车辆距所述转角智能镜的距离形成距离信息,将所述距离信息通过所述转角智能镜的显示屏予以显示。
23.本发明还提供了一种利用上述的停车场用的智能转角镜的提示系统,包括:
24.安装于停车场各个车位处的车位传感器,用于实时检测车位的状态并将车位实时状态上传至云端;
25.车位分析模块,与云端通信连接,用于对云端处的各车位实时状态进行分析以得到剩余车位信息;以及
26.与所述车位分析模块连接并安装于所述智能转角镜上的控制模块,用于接收剩余车位信息并控制所述显示屏对所述剩余车位信息予以显示。
27.本发明的提示系统的进一步改进在于,还包括区域划分模块,用于将停车场内的车位与智能转角镜进行对应的位置关联;
28.所述车位分析模块与所述区域划分模块连接,用于在分析剩余车位时,统计每一智能转角镜处与其位置关联的剩余车位信息并发送给对应的控制模块;
29.所述控制模块控制所述显示屏显示剩余车位信息。
30.本发明的提示系统的进一步改进在于,所述控制模块判断与智能转角镜位置关联的剩余车位数量是否大于3个,若是则控制所述显示屏显示剩余车位数量,若否则控制所述显示屏显示剩余车位数量及剩余车位编码。
31.本发明的提示系统的进一步改进在于,还包括安装于所述镜体两侧的距离探测装置,所述距离探测装置与所述控制模块连接,用于探测其距所述智能转角镜两侧的移动车辆的距离形成距离信息,并发送给所述控制模块;
32.所述控制模块控制所述显示屏显示对应的距离信息。
附图说明
33.图1为本发明停车场用的智能转角镜的结构示意图。
34.图2为本发明利用停车场用的智能转角镜的提示方法的流程图。
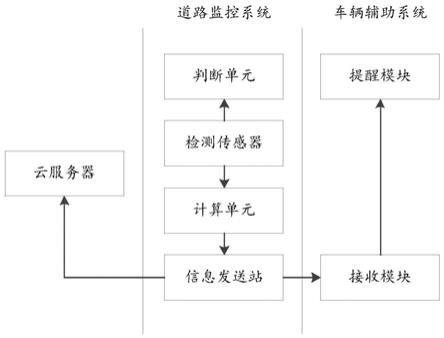
35.图3为本发明利用停车场用的智能转角镜的提示系统的系统图。
具体实施方式
36.下面结合附图和具体实施例对本发明作进一步说明。
37.参阅图1,本发明提供了一种停车场用的智能转角镜及提示系统与方法,用于解决
现有的停车场内的转角镜功能单一,仅用于对转角路况进行查看,和现有的车位传感器通过指示灯显示对应车位的状态,使得司机只能看到一排车位的情况而无法分清路口是否有剩余车位,进而导致了司机需要兜转多条道路才能找到停车位置,时间较久。本发明的智能转角镜上设置有显示屏及通信模块,从而该智能转角镜能够与云端进行通信,接收云端下发的剩余车位进而通过显示屏进行显示,利用智能转角镜显示剩余车位信息,能够有效引导车辆寻找车位,避免了车辆驶入没有车位的道路上行驶的情况,节省停车时间,提高了业主的停车体验。下面结合附图对本发明停车场用的智能转角镜及提示系统与方法进行说明。
38.参阅图1,显示了本发明停车场用的智能转角镜的结构示意图。下面结合图1,对本发明停车场用的智能转角镜进行说明。
39.如图1所示,本发明的停车场用的智能转角镜包括镜体21、显示屏22以及通信模块,显示屏22设于镜体21上,通信模块设于镜体21上,该通信模块与云端通信连接,用于接收停车场的剩余车位信息并发送给显示屏22进行显示。
40.智能转角镜在使用时,安装在停车场的交叉路口处,通常安装在两条相交的道路转角处的柱子上,该智能转角镜呈一定角度安装固定,使得在道路上行驶的车辆在快要到交叉口处的时候能够通过智能转角镜看到另一条道路的情况,避免发生车辆碰撞。本发明的智能转角镜上设置显示屏,能够显示剩余车位信息为车辆提供指引功能,让车辆可以快速的找到车位。
41.较佳地,停车场的各个车位处均安装有车位传感器,车位传感器能够检测车位的占用情况,也即车位的使用状态。在停车场处设置一智能网关,该智能网关与所有的车位传感器连接,采集所有车位传感器实时检测的车位的使用状态,并将车位的使用状态汇总上传给云端。车位传感器较佳采用红外传感器。在云端处对车位的使用状态进行分析,能够得到剩余车位信息,也即没有被占用的车位的信息,包括车位的位置及车位的编码,云端将剩余车位信息下发给智能转角镜的通信模块进而通过智能转角镜上的显示屏进行显示,对停车场内寻找停车位的车辆进行提示,以引导其快速的找到车位。
42.进一步地,镜体21包括安装壳和固定在安装壳上的镜片,该镜片为圆形状,镜片的表面为镜面。显示屏22为长方形状,该显示屏22贴设在镜片的上部处。通信模块安装固定在安装壳上,且位于镜片的后方。通信模块较佳为zigbee通信模块。
43.在本发明的一种具体实施方式中,智能转角镜还包括设于镜体21两侧的距离探测装置23,该距离探测装置23用于探测其距镜体21两侧的移动车辆的距离形成距离信息,并发生给显示屏22进行显示。
44.智能转角镜能够照到两侧道路的路况,在该智能转角镜的两侧道路上有车辆行驶移动时,距离探测装置23探测到车辆并能够实时的探测得到其距车辆的距离形成距离信息,将该距离信息显示在显示屏22上,能够提示车辆的车主其距交叉口的距离,还能够提示另一条道路上的车辆的车主有车辆向交叉口驶来且距离的多少。
45.进一步地,该智能转角镜上还设有控制模块,该控制模块与显示屏22和距离探测装置23连接,控制模块能够接收到距离探测装置23探测得到的距离信息,并根据前后两个时刻的距离信息变化判断车辆的行驶方向,实现车辆行驶方向及车辆距离的识别,进而将车辆行驶方向及车辆的距离信息通过显示屏予以显示。使得本发明的智能转角镜通过显示
屏能够对路况进行显示提示,提示转弯道路上的车辆的行驶方向及车辆的距离。
46.再进一步地,当道路上有两个车辆相向行驶时,距离探测装置23探测到两个物体以及其距两个物体的距离信息,将探测到的信息发送给控制模块,控制模块分析两个物体的距离信息的前后时刻变化,进而能够得出一个物体是向着靠近智能转角镜的方向移动的,可将该物体成为驶来车辆,另一个物体是向着远离智能转角镜的方向移动的,可将该物体称为驶离车辆,由于显示屏22的显示区域有限,控制模块控制将驶来车辆及其距离信息予以显示,对驶离车辆不做显示处理。
47.较佳地,距离探测装置23为超声波传感器,通过发送超声波来检测道路上是否有车辆以及其距车辆的距离。又佳地,距离探测装置23的最远探测距离为3m。
48.本发明还提供了一种利用停车场用的智能转角镜的提示系统,下面该提示系统进行说明。
49.如图3所示,本发明的提示系统包括车位传感器31、云端32、车位分析模块33以及控制模块34,车位传感器31安装于停车场的各个车位处,车位传感器31用于实时检测车位的状态并将车位实时状态上传至云端32;车位分析模块33与云端32通信连接,用于对云端32处的各车位实时状态进行分析以得到剩余车位信息;控制模块34与车位分析模块33连接并安装于智能转角镜上,该控制模块34用于接收剩余车位信息并控制显示屏对剩余车位信息予以显示。
50.较佳地,控制模块34设于智能转角镜处,并与智能转角镜的显示屏控制连接,控制模块34与智能转角镜一一对应设置,即为每一个智能转角镜均设置一个对应的控制模块34。
51.在一种较佳的实施方式中,车位分析模块33设于云端32处,对云端32处接收的各车位实时状态进行统计分析,得出剩余车位信息,也即未被占用的车位。剩余车位信息包括车位的位置与车位的编码,车位分析模块33将分析得到的剩余车位信息发送给控制模块34以便于控制模块34控制对应的显示屏进行显示。
52.在另一种较佳的实施方式中,车位分析模块33设于停车场处,并与停车场内的各个智能转角镜的控制模块34通信连接,云端32将接收到的的所有的车位实时状态汇总呈信息列表,并将其下发给车位分析模块33,车位分析模块33读取信息列表并找出剩余车位形成剩余车位信息。
53.在本发明的一种具体实施方式中,本发明的提示系统还包括区域划分模块,该区域划分模块用于将停车场内的车位与智能转角镜进行对应的位置关联;车位分析模块33与区域划分模块连接,用于在分析剩余车位时,统计每一智能转角镜处与其位置关联的剩余车位信息并发送给对应的控制模块,通过控制模块控制显示屏显示剩余车位信息。
54.较佳地,区域划分模块基于停车场内各车位的分布以及各智能转角镜的分布来对车位和智能转角镜进行位置关联,智能转角镜的位置处于交叉路口处,该智能转角镜与交叉路口处的两条道路上分布的车位进行位置关联,通过智能转角镜显示该交叉路口处的两条道路上的剩余车位信息,如此能够提高智能转角镜的指引效率,也即车辆行驶到对应的交叉路口处可通过该位置处的智能转角镜获得附近的剩余车位信息,能够快速的找到停车位,即使该智能转角镜处显示车位已满,也能够节省车辆的寻找车位的时间,因车辆无需转到没有空余车位的道路上进行车位寻找了。
55.在一较佳的实施方式中,当车位分析模块33设于云端32处时,该区域划分模块也设于云端32处。在另一较佳实施方式中,当车位分析模块33设于停车场处时,该区域划分模块也设于停车场处。
56.进一步地,区域划分模块为每一智能转角镜建立对应的车位关联表,在车位关联表中存储与智能转角镜位置相对应的车位,车位关联表中存储有车位的位置及车位的编码。车位分析模块33在对剩余车位进行分析时,利用剩余车位信息中的车位的编码及车位的位置查找对应的车位关联表,进而查找到对应的智能转角镜,将该智能转角镜对应的车位关联表中所有的剩余车位信息发送给对应的控制模块34。
57.再进一步地,区域划分模块基于停车场内的各车位的分布对各车位进行区域划分,形成包含有多个车位区域的车位分布地图。区域划分模块还基于停车场内的各智能转角镜的分布对各智能转角镜进行区域划分,形成包含有多个智能转角镜区域的智能转角镜分布地图。区域划分模块还基于智能转角镜区域将沿同一通路上设置的相邻的两个智能转角镜按顺序进行关联。车位分析模块33在对某一智能转角镜进行剩余车位分析时,还对与该智能转角镜相关联的下一个智能转角镜的剩余车位进行分析,得到下一个智能转角镜处是否有剩余车位并形成提示信息,将该提示信息发送给对应的智能转角镜的控制模块34。该控制模块34接收到提示信息后,将该提示信息通过显示屏予以显示,使得智能转角镜不仅能够显示其所在的两条道路上是否有剩余车位,还能够提示下一个智能转角镜处是否有剩余车位。较佳地,当某一条通长设置的道路上有多个智能转角镜时,该智能转角镜所对应的道路即为该智能转角镜所在位置与下一个智能转角镜所在位置之间的道路段。
58.又进一步地,控制模块34在控制显示屏对剩余车位信息进行显示时,控制模块34通过区域划分模块中的车位分布地图识别剩余车位所在的方向,也即该剩余车位是在哪一条道路上,进而在智能转角镜的显示屏相对应的一侧显示指示箭头,以提示车位所在的方向。当该智能转角镜处的两条道路上均有剩余车位时,在显示屏的两侧均显示指示箭头。
59.在本发明的一种具体实施方式中,控制模块34判断与智能转角镜位置关联的剩余车位数量是否大于3个,若是则控制显示屏显示剩余车位数量,若否则控制显示屏显示剩余车位数量及剩余车位编码。
60.由于显示屏的显示区域有限,当智能转角镜处有很多剩余车位时,显示屏无法将所有的剩余车位的信息均予以显示,且当剩余车位较多时,司机的自主选择性较大,此时控制模块34通过显示屏只做车位数量的指示,可不用指示具体的车位信息。当车位数量较少时,可通过车位信息为司机提供明确的指引。
61.在本发明的一种具体实施方式中,本发明的提示系统还包括安装于镜体两侧的距离探测装置,该距离探测装置与控制模块连接,用于探测其距智能转角镜两侧的移动车辆的距离形成距离信息,并发送给控制模块34,控制模块34控制显示屏显示对应的距离信息。
62.通过距离探测装置能够探测智能转角镜的两个方向是否有车辆驶来,并提示驶来车辆的距离信息。
63.控制模块进一步地对接收的距离信息进行分析判断,利用前后两个时刻的距离信息变化判断车辆的行驶方向,实现对车辆的行驶方向的识别,在显示车辆的距离信息的同时,对车辆的行驶方向也予以显示。实现了提示转弯道路上的车辆的行驶方向及车辆的距离。
64.本发明还提供了一种利用停车场用的智能转角镜的提示方法,下面对该提示方法进行说明。
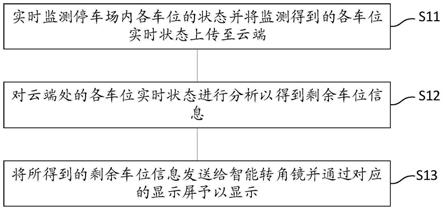
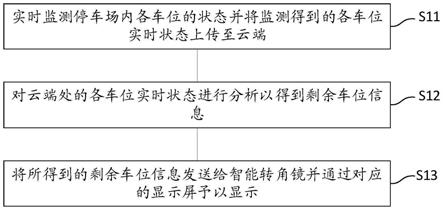
65.如图2所示,本发明的利用停车场用的智能转角镜的提示方法,包括如下步骤:
66.执行步骤s11,实时监测停车场内各车位的状态并将监测得到的各车位实时状态上传至云端;接着执行步骤s12;
67.执行步骤s12,对云端处的各车位实时状态进行分析以得到剩余车位信息;接着执行步骤s13;
68.执行步骤s13,将所得到的剩余车位信息发送给智能转角镜并通过对应的显示屏予以显示。
69.在本发明的一种具体实施方式中,还包括:
70.将停车场内的车位与智能转角镜进行对应的位置关联;
71.在分析剩余车位时,统计每一智能转角镜处与其位置关联的剩余车位信息并通过对应的显示屏进行显示。
72.较佳地,将智能转角镜与其所在交叉路口处两条道路上的车位进行位置关联,即为每一智能转角镜建立对应的车位关联表,在车位关联表中存储与智能转角镜位置相对应的车位,车位关联表中存储有车位的位置及车位的编码。如此能够利用智能转角镜提示其附近是否有剩余车位。
73.进一步地,基于车位的分布识别剩余车位所在的方向,进而在智能转角镜上通过箭头提示车位所在的方向。
74.在本发明的一种具体实施方式中,还包括:
75.判断与智能转角镜位置关联的剩余车位数量是否大于3个,若是则通过对应的显示屏显示剩余车位数量;
76.若否,则通过对应的显示屏显示剩余车位数量及剩余车位编码。
77.在本发明的一种具体实施方式中,还包括:
78.实时探测转角智能镜的两侧道路上是否有车辆,若是则探测车辆距转角智能镜的距离形成距离信息,将距离信息通过转角智能镜的显示屏予以显示。
79.进一步地,利用前后两个时刻的距离信息变化判断车辆的行驶方向,并将行驶方向通过显示屏予以显示。
80.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。