1.本技术属于飞行控制技术领域,特别涉及一种基于无线电高度解算的危险高度告警方法。
背景技术:
2.飞机撞地失事主要有两种情况,一种情况是由于飞机发生机械故障,使得飞机失去控制而坠毁,称为失控撞地;另一种情况是飞机不存在任何机械故障,但由于不知道地形而误触山坡或障碍物上,造成飞机撞到了山峰、山脉、障碍物等复杂地形而发生的事故,称为可控飞行撞地(controlledflightintoterrain,cfit)。
3.根据统计数据显示,可控飞行撞地导致飞行坠毁的数量远大于失控撞地,因此可控飞行撞地是威胁航空安全的头号杀手。
4.为了提高飞机的安全性,近地告警系统是抑制可控飞行撞地事故的主要方法,而且它的确也在减少cfit事故中发挥了巨大的作用,但现有技术中的近地告警精度普遍不高。因此,需要一种新的近地告警方法以提高飞机的近地飞行的安全性。
技术实现要素:
5.本技术的目的是提供了一种基于无线电高度解算的危险高度告警方法,以解决或减轻背景技术中的至少一个问题。
6.本技术的技术方案是:一种基于无线电高度解算的危险高度告警方法,所述方法包括:
7.获取无线电高度信号,确定所述无线电高度下沉速率及所述无线电信号所使用的低通滤波器;
8.根据飞机现实参数解算飞机拉起所需的高度,以此作为危险高度,与飞机实际离地高度比较,当飞机高度小于危险高度,自动发出告警信息,其中,所述危险高度包括飞机的俯冲使用危险高度和有地形接近使用危险高度,两者取最大值为危险高度。
9.在本技术中,所述无线电高度下沉速率为:
[0010][0011]
式中,dhr为无线电高度下沉速率,h
j
为边界高度,h为阈值高度,nyp为拉起过载,g为重力加速度。
[0012]
在本技术中,所述无线电下沉速率具有限幅,所述限幅为不超过最大边界高度下的无线电下沉速率。
[0013]
在本技术中,所述低通滤波器使得滤波后得到的无线电高度下沉速率dhr与无线电高度表数据一段时间内的平均下沉律相同或相近。
[0014]
在本技术中,所述低通滤波器为
[0015]
在本技术中,飞机的俯冲使用危险高度确定方法为:
[0016][0017]
式中,v为真空速,vy为当前飞机升降速度,g为重力加速度,nyp为拉起过载,h为阈值高度。
[0018]
在本技术中,有地形接近使用危险高度确定方法为:
[0019][0020]
式中,dhr为无线电高度下沉速率,nyp为拉起过载。
[0021]
本技术所提供的危险高度告警方法不依赖外部设备,只根据无线电高度表的数据来获取地形信息并解算飞机的地形接近率,完成危险高度告警,同时考虑无线电高度表信号的处理。
附图说明
[0022]
为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
[0023]
图1为本技术的方法流程示意图。
[0024]
图2为本技术一实施例的信号处理仿真验证示意图。
[0025]
图3为本技术一实施例中的部分信号放大示意图。
[0026]
图4为本技术一实施例的危险高度解算仿真验证示意图。
[0027]
图5为本技术一实施例的危险高度解算仿真验证示意图。
[0028]
图6为本技术一实施例的危险高度解算仿真验证示意图。
[0029]
图7为本技术一实施例的危险高度解算仿真验证示意图。
[0030]
图8为本技术一实施例的危险高度解算仿真验证示意图。
[0031]
图9为本技术一实施例的危险高度解算仿真验证示意图。
具体实施方式
[0032]
为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
[0033]
本发明旨在帮助飞机提高安全性能的系统,对提高民用航空的安全水平。
[0034]
如图1所示,本技术的基于无线电高度解算的危险高度告警方法包括:
[0035]
首先,获取无线电高度信号,并对该信号进行处理。
[0036]
该信号处理主要包括两部分,一是确定无线电高度下沉率dhr及其限幅,而是确定所使用的低通滤波器。
[0037]
a)无线电高度下沉速率dhr及其限幅
[0038]
低拉功能的边界高度h
j
(即解算高度),本实施例中以2500米计算,通过dhr2/(2*2*9.8) 300=2500,200为阈值高度,2g过载拉起,得到无线电高度下沉速率dhr最大=
300.266m/s。
[0039]
因此,取最大负向无线电高度下沉速率dhr的限幅值为300m/s。
[0040]
b)确定低通滤波器
[0041]
通过低通滤波器滤波后得到的无线电高度下沉速率dhr应与某无线电高度表数据一段时间内的平均下沉律接近。
[0042]
在本技术优选实施例中,该低通滤波器选取为1.5/(s 1.5)。
[0043]
参见图2及图3所示,使用上述低通滤波器前后的无线电高度下沉速率dhr的信号两者较为接近。
[0044]
之后,根据飞机现实参数解算飞机拉起所需的高度,以此作为危险高度,与飞机实际离地高度比较,同时考虑了多种地形因素,当飞机高度小于危险高度,自动发出告警信息,其中,危险高度包括飞机的俯冲使用危险高度和有地形接近使用危险高度,两者去最大值为最终使用的危险高度。
[0045]
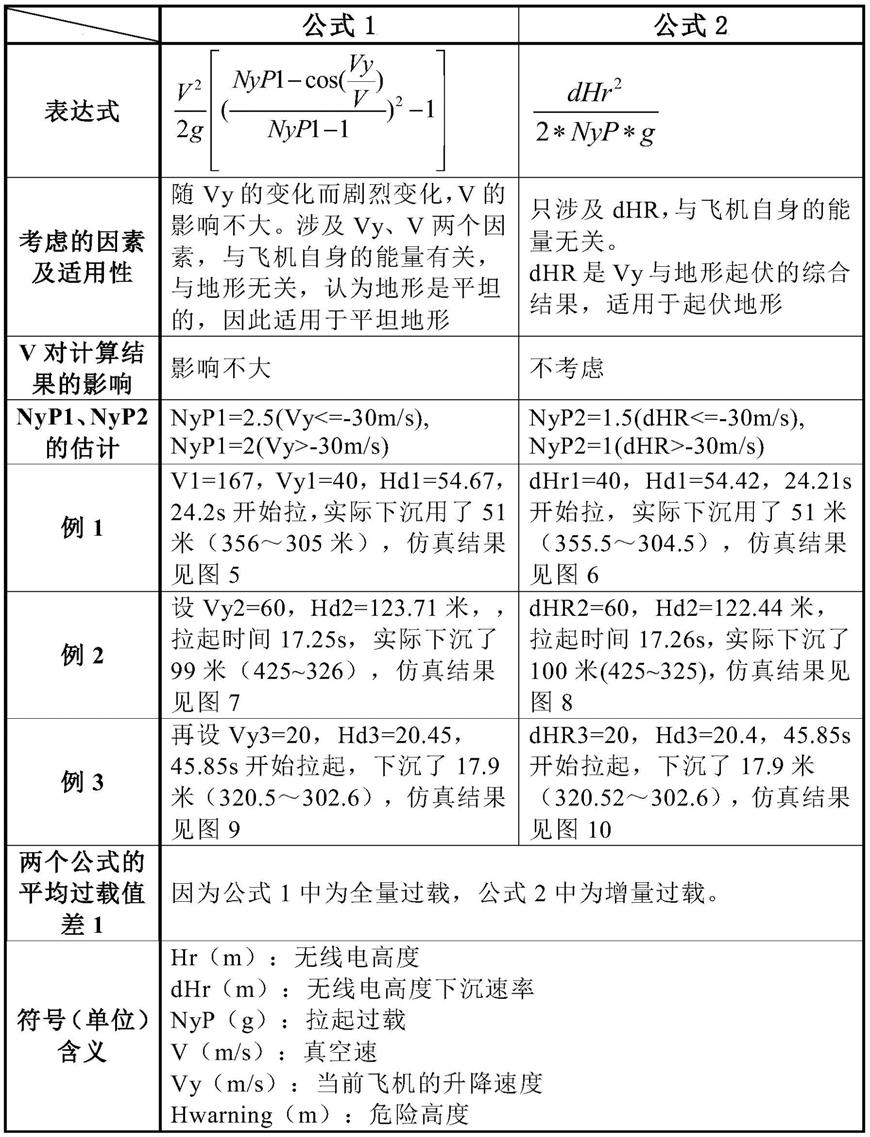
在本技术中,飞机的俯冲使用危险高度通过如下公式计算:
[0046]
式中,v为真空速,vy为当前飞机升降速度,g为重力加速度,nyp为拉起过载,h为阈值高度。
[0047]
在本技术中,有地形接近使用危险高度通过如下公式计算:
[0048]
式中,dhr为无线电高度下沉速率,nyp为拉起过载。
[0049]
在本技术一实施例中,上述阈值高度h可以设置为200m,可以理解的是,该阈值高度还可以设置成其他数值,例如300m。
[0050]
本技术中的飞机的俯冲使用危险高度与有地形接近使用危险高度的比较,参见表1所示:
[0051]
表1
[0052][0053]
上述参数下的实施效果如3~图8所示,在不考虑地形的情况下,两公式计算的危险高度接近,与实际仿真的飞机下沉高度基本吻合,可以满足使用要求。
[0054]
本技术所提供的危险高度告警方法不依赖外部设备,只根据无线电高度表的数据来获取地形信息并解算飞机的地形接近率,是近地告警成功的关键,无线电高度表信号的处理和滤波是其关键技术。
[0055]
本技术的危险高度告警方法可以显著提高飞机近地告警精度,帮助飞机快速拉起以防止发生撞地事故,对提高飞机的安全性具有重要意义。
[0056]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何
熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。