1.本发明属于轨道交通轨道巡检领域,具体涉及一种模块化的轨道式巡检机器人系统。
背景技术:
2.目前高铁、地铁、城市轻轨等高时效、高容积率、低污染的交通工具已经成为人们出行的首选。随着对城市轨道交通需求的增加,其建设里程、运输任务、行车密度和运行速度都在不断增加。轨道线路设备常年裸露在自然中,受人为因素和恶劣环境因素的影响,轨道线路经常发生损坏,如钢轨、联结零件及轨枕不断磨损等。因此及时检测轨道线路状态、加强线路检测管理,将事故隐患消除在萌芽状态成为确保线路质量、保证运输安全的重要工作。
3.然而,目前轨道交通的轨道检测基本是以人工检查为主,存在劳动强度大、精度低、可靠性差和存在巡检盲区等缺点。此外,该方法只能在没有列车荷载的情况下完成,使用不便。随着机器人技术的发展,利用移动机器人完成轨道巡检已经成为轨道巡检方法中越来越重要的一个分支。该方法可有效降低人工的劳动强度和安全风险,提高巡检效率,达到巡检无盲区的目的,成为轨道巡检中的一个重要的技术手段,因此,研究轨道巡检机器人具有重大的现实意义。同时针对轨道交通的各种病害检测,开发一种可装配各种不同检测设备的巡检机器人,并通过机器人上搭载的gps/北斗定位模块以及编码器计量模块,精准定位出缺陷位置。
4.目前,国内的轨道式综合巡检机器人均采用的是轨道车的方式,价格昂贵,检测数据虽然可以自动采集,但是不能实时分析,无法满足小型化、全自动化和智能化要求。
5.而小型轨检车只能针对轨道检测、接触网检测和隧道限界检测功能中的一种进行检测,但是不能满足不同的病害检测,而且针对地铁、高铁等不同的环境和检测标准,也需要不同的巡检机器人。
技术实现要素:
6.针对现有技术以上缺陷或改进需求中的至少一种,本发明提供了一种模块化的轨道式巡检机器人系统,包括数个模块化的巡检机器人,各巡检机器人通过通用的可装配连接单元前后串联,包括钢轨内部伤损和表面伤损检测小车、隧道病害及限界检测小车、接触轨几何检测小车、接触网几何检测小车、钢轨焊缝及几何辅助检测小车,至少一个具有动力系统,作为串联后整个巡检机器人系统行走的牵引动力,其余为随动小车;集环境感知、隧道病害检测、轨道几何参数和缺陷检测、扣件和焊缝检测、电气化设备和通信信号设备检测等检测功能于一体,可根据检测任务的需要合理搭建模块小车。通过多模块的装配,协同巡检,提高城市地铁环境下的巡检作业效率和质量。
7.为实现上述目的,按照本发明的一个方面,提供了一种模块化的轨道式巡检机器人系统,其特征在于:包括数个模块化的巡检机器人,各巡检机器人通过通用的可装配连接
单元前后串联;
8.所述模块化的巡检机器人包括钢轨内部伤损和表面伤损检测小车、隧道病害及限界检测小车、接触轨几何检测小车、接触网几何检测小车、钢轨焊缝及几何辅助检测小车;
9.所述钢轨内部伤损和表面伤损检测小车具有动力系统,作为串联后整个巡检机器人系统行走的牵引动力,所述隧道病害及限界检测小车、接触轨几何检测小车接触网几何检测小车、钢轨焊缝及几何辅助检测小车至少部分为随动小车。
10.优选地,所述钢轨内部伤损和表面伤损检测小车安装有超声波检测装置;
11.所述超声波检测装置包括若干轮式检测探轮,用于检测钢轨内部伤损,通过伸缩装置安装在车架下方;在非测量工作状态下,所述伸缩装置将所述超声波检测装置抬升脱离走行面,缩回到车架;在测量工作状态下,所述伸缩装置将所述超声波检测装置从车架伸出,接触轨道进行测量。
12.优选地,所述钢轨内部伤损和表面伤损检测小车还包括电磁检测装置;
13.所述电磁检测装置包括数个电磁探头,用于检测钢轨表面伤损。
14.优选地,所述隧道病害及限界检测小车安装有激光断面扫描仪、激光雷达、卫星导航系统、惯性测量单元及全景相机。
15.优选地,所述接触轨几何检测小车搭载有相机和线激光器。
16.优选地,所述接触网几何检测小车安装有激光雷达器、激光测距传感器、伺服电机、编码器。
17.优选地,所述钢轨焊缝及几何辅助检测小车安装有机械臂,机械臂携带有检测探头和视觉传感器。
18.优选地,所述可装配连接单元为车钩。
19.优选地,所述钢轨内部伤损和表面伤损检测小车、接触轨几何检测小车包括维持静平衡数量的车轮。
20.优选地,所述隧道病害及限界检测小车、接触网几何检测小车、钢轨焊缝及几何辅助检测小车均采用单轴平衡车底盘。
21.上述优选技术特征只要彼此之间未构成冲突就可以相互组合。
22.总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
23.1、本发明的模块化的轨道式巡检机器人系统,包括数个模块化的巡检机器人,各巡检机器人通过通用的可装配连接单元前后串联,包括钢轨内部伤损和表面伤损检测小车、隧道病害及限界检测小车、接触轨几何检测小车、接触网几何检测小车、钢轨焊缝及几何辅助检测小车,至少一个具有动力系统,作为串联后整个巡检机器人系统行走的牵引动力,其余为随动小车。
24.2、本发明的模块化的轨道式巡检机器人系统,集环境感知、隧道病害检测、轨道几何参数和缺陷检测、扣件和焊缝检测、电气化设备和通信信号设备检测等检测功能于一体,可根据检测任务的需要合理搭建模块小车。
25.3、本发明的模块化的轨道式巡检机器人系统,通过多模块的装配,协同巡检,提高城市地铁环境下的巡检作业效率和质量。
附图说明
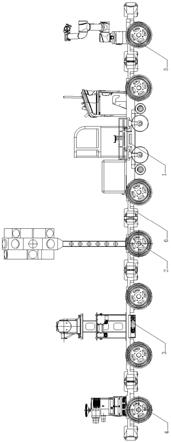
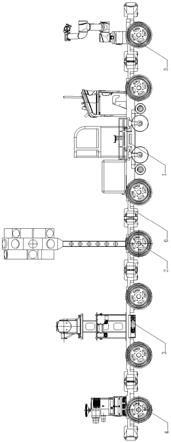
26.图1是本发明实施例的模块化的轨道式巡检机器人系统的组成示意图;
27.图2是本发明实施例的模块化的轨道式巡检机器人系统的钢轨内部伤损和表面伤损检测小车的侧视示意图;
28.图3是本发明实施例的模块化的轨道式巡检机器人系统的钢轨内部伤损和表面伤损检测小车的俯视示意图;
29.图4是本发明实施例的模块化的轨道式巡检机器人系统的隧道病害及限界检测小车的侧视示意图;
30.图5是本发明实施例的模块化的轨道式巡检机器人系统的隧道病害及限界检测小车的俯视示意图;
31.图6是本发明实施例的模块化的轨道式巡检机器人系统的接触轨几何检测小车的侧视示意图;
32.图7是本发明实施例的模块化的轨道式巡检机器人系统的接触轨几何检测小车的俯视示意图;
33.图8是本发明实施例的模块化的轨道式巡检机器人系统的接触轨几何检测小车的侧视示意图;
34.图9是本发明实施例的模块化的轨道式巡检机器人系统的接触轨几何检测小车的俯视示意图;
35.图10是本发明实施例的模块化的轨道式巡检机器人系统的钢轨焊缝及几何辅助检测小车的侧视示意图;
36.图11是本发明实施例的模块化的轨道式巡检机器人系统的钢轨焊缝及几何辅助检测小车的俯视示意图;
具体实施方式
37.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。下面结合具体实施方式对本发明进一步详细说明。
38.作为本发明的一种较佳实施方式,如图1
‑
11所示,本发明提供一种模块化的轨道式巡检机器人系统,包括数个模块化的巡检机器人,各巡检机器人通过通用的可装配连接单元前后串联;所述可装配连接单元例如为车钩6。
39.如图1所示,所述模块化的巡检机器人包括钢轨内部伤损和表面伤损检测小车1、隧道病害及限界检测小车2、接触轨几何检测小车3、接触网几何检测小车4、钢轨焊缝及几何辅助检测小车5。
40.所述钢轨内部伤损和表面伤损检测小车1具有动力系统,作为串联后整个巡检机器人系统行走的牵引动力,所述隧道病害及限界检测小车2、接触轨几何检测小车3接触网几何检测小车4、钢轨焊缝及几何辅助检测小车5至少部分为随动小车。
41.如图2
‑
3所示,优选地,所述钢轨内部伤损和表面伤损检测小车1由多个模块拼装组成,方便天窗时间上轨和平时存放,主要包括车架、电机、减速齿轮、行车制动机构、驻车
制动机构和蓄电池,速度可达到20km/h,蓄电池给车提供动力,同时也给装配在车上的其他模块提供电力,车上设置驾驶位13和操作台14(操作台上有笔记本电脑固定位),可由人工操作,同时也可自动驾驶。同时采用超声波检测装置11、耦合液涂覆装置110和电磁检测装置12,超声波检测装置11由左右共四个轮式检测探轮(大轮)组成,检测钢轨内部伤损,耦合液涂覆装置110由左右共四个耦合液涂覆轮110(小轮)组成,检测前释放涂覆耦合液;电磁检测装置12由两个复合电磁探头(磁轭、激励线圈和检测线圈)组成,随所述超声波检测装置11一并升降,检测钢轨表面伤损。小车采用三轮或四轮静平衡底盘,小车前后设置有车钩6,方便与其他检测小车进行装配联动。所述超声波检测装置11、耦合液涂覆装置110通过伸缩装置安装在车架下方;在非测量工作状态下,所述伸缩装置将所述超声波检测装置11、耦合液涂覆装置110抬升脱离走行面,缩回到车架;在测量工作状态下,所述伸缩装置将所述超声波检测装置11、耦合液涂覆装置110从车架伸出,接触轨道进行测量。
42.如图4
‑
5所示,优选地,所述隧道病害及限界检测小车2采用高精度移动激光测量技术,安装有激光断面扫描仪、激光雷达、卫星导航系统gnss、惯性测量单元imu及全景相机等多传感器。小车采用两轮平衡车形式,小车前后设置有车钩6,方便与其他检测小车进行装配联动。
43.如图6
‑
7所示,优选地,所述接触轨几何检测小车3采用结构光三角成像检测技术,搭载有相机31和线激光器32。小车采用三轮或四轮静平衡底盘,小车前后设置有车钩6,方便与其他检测小车进行装配联动。
44.如图8
‑
9所示,优选地,所述接触网几何检测小车4采用雷达目标扫描定位、模式识别目标跟踪和激光测距精确测距技术,安装有激光雷达器41、激光测距传感器42、伺服电机43、编码器44及相应控制触发电路板。小车采用两轮平衡车形式,小车前后设置有车钩6,方便与其他检测小车进行装配联动。
45.如图10
‑
11所示,优选地,所述钢轨焊缝及几何辅助检测小车5安装有机械臂51,机械臂51携带有检测探头52和视觉传感器53。通过位置控制,实现机械臂辅助的巡检作业,包括通过机械臂携带检测探头,靠近钢轨焊缝,检测焊缝伤损等。小车采用两轮平衡车形式,小车前后设置有车钩,方便与其他检测小车进行装配联动。
46.综上所述,与现有技术相比,本发明的方案具有如下显著优势:
47.本发明的模块化的轨道式巡检机器人系统,包括数个模块化的巡检机器人,各巡检机器人通过通用的可装配连接单元前后串联,包括钢轨内部伤损和表面伤损检测小车、隧道病害及限界检测小车、接触轨几何检测小车、接触网几何检测小车、钢轨焊缝及几何辅助检测小车,至少一个具有动力系统,作为串联后整个巡检机器人系统行走的牵引动力,其余为随动小车。
48.本发明的模块化的轨道式巡检机器人系统,集环境感知、隧道病害检测、轨道几何参数和缺陷检测、扣件和焊缝检测、电气化设备和通信信号设备检测等检测功能于一体,可根据检测任务的需要合理搭建模块小车。
49.本发明的模块化的轨道式巡检机器人系统,通过多模块的装配,协同巡检,提高城市地铁环境下的巡检作业效率和质量。
50.可以理解的是,以上所描述的系统的实施例仅仅是示意性的,其中作为分离部件说明的单元可以是或者也可以不是物理上分开的,既可以位于一个地方,或者也可以分布
到不同网络单元上。可以根据实际需要选择其中的部分或全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
51.另外,本领域内的技术人员应当理解的是,在本发明实施例的申请文件中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
52.本发明实施例的说明书中,说明了大量具体细节。然而应当理解的是,本发明实施例的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。类似地,应当理解,为了精简本发明实施例公开并帮助理解各个发明方面中的一个或多个,在上面对本发明实施例的示例性实施例的描述中,本发明实施例的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。
53.然而,并不应将该公开的方法解释成反映如下意图:即所要求保护的本发明实施例要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如权利要求书所反映的那样,发明方面在于少于前面公开的单个实施例的所有特征。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本发明实施例的单独实施例。
54.最后应说明的是:以上实施例仅用以说明本发明实施例的技术方案,而非对其限制;尽管参照前述实施例对本发明实施例进行了详细的说明,本领域的技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。