技术特征:
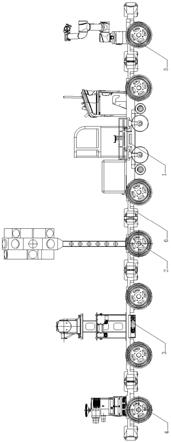
1.一种模块化的轨道式巡检机器人系统,其特征在于:包括数个模块化的巡检机器人,各巡检机器人通过通用的可装配连接单元前后串联;所述模块化的巡检机器人包括钢轨内部伤损和表面伤损检测小车(1)、隧道病害及限界检测小车(2)、接触轨几何检测小车(3)、接触网几何检测小车(4)、钢轨焊缝及几何辅助检测小车(5);所述钢轨内部伤损和表面伤损检测小车(1)具有动力系统,作为串联后整个巡检机器人系统行走的牵引动力,所述隧道病害及限界检测小车(2)、接触轨几何检测小车(3)接触网几何检测小车(4)、钢轨焊缝及几何辅助检测小车(5)至少部分为随动小车。2.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述钢轨内部伤损和表面伤损检测小车(1)安装有超声波检测装置(11);所述超声波检测装置(11)包括若干轮式检测探轮,用于检测钢轨内部伤损,通过伸缩装置安装在车架下方;在非测量工作状态下,所述伸缩装置将所述超声波检测装置(11)抬升脱离走行面,缩回到车架;在测量工作状态下,所述伸缩装置将所述超声波检测装置(11)从车架伸出,接触轨道进行测量。3.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述钢轨内部伤损和表面伤损检测小车(1)还包括电磁检测装置(12);所述电磁检测装置(12)包括数个电磁探头,用于检测钢轨表面伤损。4.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述隧道病害及限界检测小车(2)安装有激光断面扫描仪、激光雷达、卫星导航系统、惯性测量单元及全景相机。5.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述接触轨几何检测小车(3)搭载有相机(31)和线激光器(32)。6.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述接触网几何检测小车(4)安装有激光雷达器(41)、激光测距传感器(42)、伺服电机(43)、编码器(44)。7.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述钢轨焊缝及几何辅助检测小车(5)安装有机械臂(51),机械臂(51)携带有检测探头(52)和视觉传感器(53)。8.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述可装配连接单元为车钩(6)。9.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述钢轨内部伤损和表面伤损检测小车(1)、接触轨几何检测小车(3)包括维持静平衡数量的车轮。10.如权利要求1所述的模块化的轨道式巡检机器人系统,其特征在于:所述隧道病害及限界检测小车(2)、接触网几何检测小车(4)、钢轨焊缝及几何辅助检测小车(5)均采用单轴平衡车底盘。
技术总结
本发明公开了一种模块化的轨道式巡检机器人系统,其特征在于:包括数个模块化的巡检机器人,各巡检机器人通过通用的可装配连接单元前后串联,包括钢轨内部伤损和表面伤损检测小车、隧道病害及限界检测小车、接触轨几何检测小车、接触网几何检测小车、钢轨焊缝及几何辅助检测小车,至少一个具有动力系统,作为串联后整个巡检机器人系统行走的牵引动力,其余为随动小车;集环境感知、隧道病害检测、轨道几何参数和缺陷检测、扣件和焊缝检测、电气化设备和通信信号设备检测等检测功能于一体,可根据检测任务的需要合理搭建模块小车。通过多模块的装配,协同巡检,提高城市地铁环境下的巡检作业效率和质量。检作业效率和质量。检作业效率和质量。
技术研发人员:汪宇亮 光振雄 朱建华 耿明 张浩 殷勤 罗存喜 赵秀杰 张毓 邱绍峰 周明翔 李加祺 彭方进 刘辉 张俊岭 郑燕 许勇
受保护的技术使用者:武汉铁道工程承包有限责任公司
技术研发日:2021.08.31
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。