1.本实用新型涉及超声设备技术领域,具体涉及一种基于遥操作的机器人超声诊断装置。
背景技术:
2.超声诊断系统是一种利用超声波成像技术进行诊断的技术。超声诊断系统常用在观察身体结构,如肌腱、肌肉、关节、血管和内脏。使用超声诊断系统的目的往往是寻找疾病的源头或排除任何病因。使用超声波对孕妇进行检查的做法称为产科超声,产科超声也被广泛使用。
3.医学超声因具有无创伤、无辐射、价格低廉而成为临床诊断不可缺少的一部分。但是超声诊断高度依赖于医生的经验,想要获取高分辨率的超声图像,对于探头位置和方向的把握及其重要。由于机器人控制系统精度高、可操作性强且灵巧性高,医生可以通过遥操作技术控制机器人,将其应用到超声扫描中。因此,提出了一种基于遥操作的机器人超声诊断装置,可以显著提高超声诊断的效率以及减轻医生的负担,应用到各种疾病的检测中。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种基于遥操作的机器人超声诊断装置,旨在解决上述技术问题。
5.本实用新型解决上述技术问题的技术方案如下:
6.一种基于遥操作的机器人超声诊断装置,包括机器人、定位机构和用于检测的超声探头,所述超声探头固定安装在所述机器人的机械臂的末端,所述定位机构通过线路与所述机器人的控制器连接,并用于对病人待检测部位进行初步定位。
7.本实用新型的有益效果是:诊断过程中,首先,病人躺在病床上,机器人和定位机构均位于病床的一侧,通过定位机构对病人待检测的部位进行初步的定位,并将对应的位置信息发送给机器人的控制器;然后,机器人的控制器接收对应的位置信息,并控制机器人带动超声探头移动至病人对应的检测部位,以进行诊断。本实用新型利用机器人控制系统所具有的精度高、可操作性强且灵巧性高的特性,医生将其应用到超声扫描中,从而获取高分辨率的超声图像,诊断效果较佳,诊断效率和效果均大大提高。
8.在上述技术方案的基础上,本实用新型还可以做如下改进。
9.进一步,还包括控制柜和操作手柄,所述控制柜上设有凹槽,所述安装槽的底部安装有2d相机,所述2d相机的镜头朝上,所述2d相机与所述机器人的控制器无线通讯连接;所述凹槽的槽口覆盖有支撑板,所述操作手柄可水平移动的安装在所述支撑板上,并可发射激光束以穿透所述支撑板,所述2d相机识别所述激光束。
10.采用上述进一步方案的有益效果是诊断时,首先,医生手握操作手柄,并使得操作手柄在支撑板上不停的移动,同时通过2d相机采集操作手柄的位置信息,并将对应的位置信息发送给机器人的控制器;机器人控制器接收对应的位置信息,并控制机器人带动超声
探头在病人检测部位不停移动,以便获得分辨率较高的超声图像,诊断效果较佳。
11.进一步,所述控制柜上设有放置槽,所述操作手柄置于所述放置槽内。
12.采用上述进一步方案的有益效果是结构简单,设计合理,方便放置和拿取操作手柄,使用方便。
13.进一步,所述支撑板为硅胶膜,所述凹槽内固定安装有压力传感器,所述压力传感器与所述硅胶膜的下表面贴合,并与所述机器人的控制器无线通讯连接。
14.采用上述进一步方案的有益效果是硅胶膜类似于人体皮肤,激光束能够更好的穿过硅胶膜,以便2d相机准确的采集操作手柄的位置,提高诊断结果的准确度;另外,压力传感器实时监测操作手柄挤压硅胶膜的压力,并将对应的信号发送给机器人的控制器,避免机器人带动超声探头挤压病人皮肤的压力过大。
15.进一步,所述控制柜上固定安装有用于显示病人检测部位图像的显示器,所述显示器与所述超声探头无线通讯连接。
16.采用上述进一步方案的有益效果是通过显示器显示超声探头检测的结果,以便医生观察,从而有利于医生获得高分辨率的超声图像,提高诊断的效果。
17.进一步,所述定位机构为3d相机。
18.采用上述进一步方案的有益效果是实现病人诊断部位的快速初步定位,以便机器人带动超声探头进行诊断,诊断效率大大提高。
19.进一步,所述机器人通过夹持器与所述超声探头连接,所述夹持器与所述超声探头的连接处固定安装有力传感器,所述力传感器通过线路与所述机器人的控制器连接。
20.采用上述进一步方案的有益效果是拆装方便,以便快速更换超声探头,便于维修;另外,通过力传感器实时监测超声探头挤压病人力的大小,避免超声探头挤压病人的力过大,保护病人,从而实现超声探头检测时压力的双重控制。
21.进一步,还包括用于记录诊断过程中的摄像头。
22.采用上述进一步方案的有益效果是通过摄像头记录超声诊断的具体过程,以便保留病人诊断的资料,便于归档和后期查询。
23.本实用新型还涉及一种如上所述基于遥操作的机器人超声诊断装置的使用方法,其特征在于,具体包括以下步骤:
24.a1:所述定位机构对病人检测的部位进行初步定位,并将定位结果发送给机器人的控制器;
25.a2:所述机器人的控制器接收所述定位机构发送来的定位结果,根据定位结果所述机器人带动超声探头对病人的检测部位进行检测。
26.本实用新型所提供的超声诊断方法利用机器人控制系统所具有的精度高、可操作性强且灵巧性高的特性,并将其应用到超声扫描中,极大地降低了医生的劳动强度,诊断效率大大提高,从而获取高分辨率的超声图像,诊断效果较佳。
27.进一步,在步骤a2之后还包括步骤a3:
28.a3:医生将操作手柄在控制柜上的支撑板上移动,相机采集所述操作手柄的位置信息,并将对应的位置信息发送给所述机器人的控制器,所述机器人根据其控制器接收的位置信息带动所述超声探头移动以调整检测位置。
29.采用上述进一步方案的有益效果是利用机器人控制系统所具有的精度高、可操作
性强且灵巧性高的特性,医生可以通过遥操作技术控制机器人,将其应用到超声扫描中,从而获取高分辨率的超声图像,诊断效果较佳。
附图说明
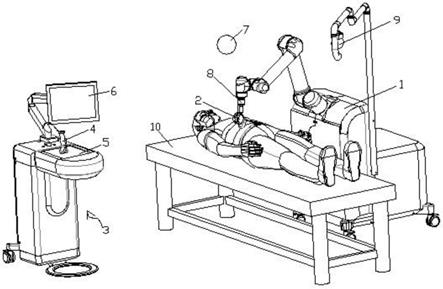
30.图1为本实用新型的结构示意图。
31.附图中,各标号所代表的部件列表如下:
32.1、机器人,2、超声探头,3、控制柜,4、操作手柄,5、硅胶膜,6、显示器,7、3d相机,8、力传感器,9、摄像头,10、病床。
具体实施方式
33.以下结合附图及具体实施例对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
34.如图1所示,本实用新型提供一种基于遥操作的机器人超声诊断装置,包括机器人1、定位机构和用于检测的超声探头2,超声探头2固定安装在机器人1的机械臂的末端,定位机构通过线路与机器人1的控制器连接,并用于对病人待检测部位进行初步定位。诊断过程中,首先,病人躺在病床10上,机器人1和定位机构均位于病床10的一侧,通过定位机构对病人待检测的部位进行初步的定位,并将对应的位置信息发送给机器人1的控制器;然后,机器人1的控制器接收对应的位置信息,并控制机器人1带动超声探头2移动至病人对应的检测部位,以进行诊断。本实用新型利用机器人控制系统所具有的精度高、可操作性强且灵巧性高的特性,医生将其应用到超声扫描中,从而获取高分辨率的超声图像,诊断效果较佳,诊断效率和效果均大大提高。
35.实施例1
36.在上述结构的基础上,本实施例还包括控制柜3和操作手柄4,控制柜3上设有凹槽,安装有由控制柜3的表面内凹形成;凹槽的底部安装有2d相机,2d相机的镜头朝上,2d相机与机器人1的控制器无线通讯连接;凹槽的槽口覆盖有支撑板,操作手柄4可水平移动的安装在支撑板上,并可发射激光束以穿透支撑板,2d相机识别激光束。诊断时,首先,医生手握操作手柄4,并使得操作手柄4在支撑板上不停的移动,同时通过2d相机采集操作手柄4的位置信息,并将对应的位置信息发送给机器人1的控制器;机器人1的控制器接收对应的位置信息,并控制机器人1带动超声探头2在病人检测部位不停移动,以便获得分辨率较高的超声图像,诊断效果较佳。
37.实施例2
38.在实施例一的基础上,本实施例中,控制柜3上设有放置槽,放置槽的形状与操作手柄4的端部相匹配,且由控制柜3的表面内凹形成;不使用时操作手柄4置于放置槽内,使用时医生取出操作手柄4即可,结构简单,设计合理,方便放置和拿取操作手柄,使用方便。
39.实施例3
40.在实施例一的基础上,本实施例中,支撑板为硅胶膜5,凹槽内通过螺栓固定安装有压力传感器,压力传感器与硅胶膜5的下表面贴合,并与机器人1的控制器无线通讯连接。硅胶膜5类似于人体皮肤,激光束能够更好的穿过硅胶膜5,以便相机准确的采集操作手柄4的位置,提高诊断结果的准确度;另外,压力传感器实时监测操作手柄4挤压硅胶膜的压力,
并将对应的信号发送给机器人1的控制器,避免机器人1带动超声探头2挤压病人皮肤的压力过大。
41.实施例4
42.在实施例一的基础上,本实施例中,控制柜3上固定安装有用于显示患者检测部位图像的显示器6,显示器6与超声探头2无线通讯连接。诊断时,超声探头2进行检测,并将检测的结果显示于显示器6上,以便医生观察,从而有利于医生获得高分辨率的超声图像,提高诊断的效果。
43.实施例5
44.在实施例一的基础上,本实施例中,控制柜3为可升降的柜体,具体结构采用现有技术,例如控制柜3包括底座和工作台,底座上设有气缸,工作台位于底座的上方,并通过螺栓与气缸的伸缩端固定连接,气缸伸缩并带动工作台升降,以便满足不同身高医生的工作需求。
45.另外,工作台上安装有控制按钮,控制按钮通过线路与气缸连接。
46.实施例6
47.在上述结构的基础上,本实施例中,定位机构为3d相机7,实现病人诊断部位的快速初步定位,以便机器人1带动超声探头2进行诊断,诊断效率大大提高。
48.上述3d相机7的位置可根据需求进行设计,可以通过支架架设于机器人1的底座上,也可以通过支架支在病床10的一侧即可。
49.实施例7
50.在上述结构的基础上,本实施例中,机器人1通过夹持器与超声探头2连接,上述夹持器通过焊接或螺栓连接的方式固定在机器人1的机械臂上,拆装方便,以便快速更换超声探头2,便于维修。
51.实施例8
52.在实施例七的基础上,本实施例中,夹持器与超声探头2的连接处通过螺栓固定安装有力传感器8,力传感器8通过线路与机器人1的控制器连接。诊断过程中,通过力传感器8实时监测超声探头2挤压病人力的大小,避免超声探头2挤压病人的力过大,保护病人。
53.实施例9
54.在上述结构的基础上,本实施例还包括用于记录诊断过程中的摄像头9,通过摄像头9记录超声诊断的具体过程,以便保留病人诊断的资料,便于归档和后期查询。
55.上述摄像头9可以通过安装架架设于机器人1的底座上,也可以通过安装架支在病床10的一侧。
56.另外,摄像头9可以与单独的控制器连接,无线或有线连接均可以,摄像头9也可以与控制中心无线通讯连接。
57.实施例10
58.本实用新型还提供一种如上所述基于遥操作的机器人超声诊断装置的使用方法,具体包括以下步骤:
59.a1:3d相机7对病人检测的部位进行初步定位,并将定位结果发送给机器人2的控制器;
60.a2:机器人1的控制器接收3d相机7发送来的定位结果,根据定位结果机器人1带动
超声探头2对病人的检测部位进行检测。
61.本实用新型所提供的超声诊断方法利用机器人控制系统所具有的精度高、可操作性强且灵巧性高的特性,并将其应用到超声扫描中,极大地降低了医生的劳动强度,诊断效率大大提高,从而获取高分辨率的超声图像,诊断效果较佳。
62.实施例11
63.在实施例十的基础上,在步骤a2之后还包括步骤a3:
64.a3:医生将操作手柄4在控制柜3上的支撑板上移动,相机采集所述操作手柄4的位置信息,并将对应的位置信息发送给所述机器人1的控制器,所述机器人1根据其控制器接收的位置信息带动所述超声探头2移动以调整检测位置。
65.本实用新型所提供的超声诊断方法利用机器人1的控制系统所具有的精度高、可操作性强且灵巧性高的特性,医生可以通过遥操作技术控制机器人1,将其应用到超声扫描中,从而获取高分辨率的超声图像,诊断效果较佳。
66.上述实施例十一的使用方法是在实施例十方案上的进一步改进,实施例十的方案是基于没有操作手柄4和控制柜3的,而实施例十一的方案是基于有控制柜3和操作手柄4的。
67.需要说明的是,本实用新型所涉及到的所有的电子器件均采用现有技术,并且上述各个电子器件之间的控制电路为现有技术。
68.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。