1.本发明涉及断裂检测装置。
背景技术:
2.在专利文献1中记载了一种断裂检测装置。在专利文献1所记载的断裂检测装置中,来自传感器的输出信号被与轿厢位置关联起来进行存储。根据轿厢位置和来自传感器的输出信号的变动的迁移来判定绳索是否存在断裂部。
3.现有技术文献
4.专利文献
5.专利文献1:国际公开第2017/203609号
技术实现要素:
6.发明所要解决的课题
7.申请人使用专利文献1所记载的断裂检测装置进行调查的结果是,作为使来自传感器的输出信号发生异常的变动的原因,发现了专利文献1所没有记载的原因。例如,在现有的断裂检测装置中,存在由于取决于电梯轿厢的速度的振动分量而发生误检测从而检测精度变差的问题。
8.本发明是为了解决上述那样的课题而完成的。本发明的目的在于提供一种能够高精度地检测出绳索存在断裂部的情况的断裂检测装置。
9.用于解决课题的手段
10.本发明的断裂检测装置具备:传感器,当电梯的绳索发生振动时,该传感器的输出信号变动;第1提取单元,其从传感器的输出信号中提取特定频带的振动分量;第2提取单元,其从由第1提取单元提取出的振动分量中使取决于电梯轿厢的速度的稳定振动分量以及渐增振动分量衰减而提取出判定信号;检测单元,其根据由第2提取单元提取出的判定信号,检测传感器的输出信号发生了异常的变动的情况;以及判定单元,其在由检测单元检测出发生了异常的变动时,根据该变动发生时的轿厢的位置来判定绳索是否存在断裂部。
11.本发明的断裂检测装置具备:传感器,当电梯的绳索发生振动时,该传感器的输出信号变动;第1提取单元,其从传感器的输出信号中提取特定频带的振动分量;第1衰减单元,其用于从由第1提取单元提取出的振动分量中使取决于电梯轿厢的速度的稳定振动分量以及渐增振动分量衰减;第2衰减单元,其用于从由第1提取单元提取出的振动分量中使取决于轿厢的位置的稳定振动分量以及渐增振动分量衰减;第2提取单元,其根据轿厢的速度以及位置来选择第1衰减单元或第2衰减单元中的一方,提取出判定信号;检测单元,其根据由第2提取单元提取出的判定信号,检测传感器的输出信号发生了异常的变动的情况;以及判定单元,其在由检测单元检测出发生了异常的变动时,根据发生该变动时的轿厢的位置来判定绳索是否存在断裂部。
12.发明效果
13.本发明的断裂检测装置例如具备第1提取单元、第2提取单元、检测单元以及判定单元。第2提取单元从由第1提取单元提取出的振动分量中使取决于电梯轿厢的速度的稳定振动分量以及渐增振动分量衰减而提取出判定信号。检测单元根据由第2提取单元提取出的判定信号,检测传感器的输出信号发生了异常的变动的情况。如果是本发明的断裂检测装置,则能够高精度地检测出绳索存在断裂部的情况。
附图说明
14.图1是示意性地示出电梯装置的图。
15.图2是示出反绳轮的例子的立体图。
16.图3是示出反绳轮的剖面的图。
17.图4是用于说明主绳索的断裂部的移动的图。
18.图5是用于说明主绳索的断裂部的移动的图。
19.图6是用于说明主绳索的断裂部的移动的图。
20.图7是示出来自传感器的输出信号的例子的图。
21.图8是示出来自传感器的输出信号的例子的图。
22.图9是用于说明传感器信号变动的例子的图。
23.图10是示出实施方式1的断裂检测装置的例子的图。
24.图11是示出实施方式1的断裂检测装置的动作例的流程图。
25.图12是示出提取部的功能的一例的图。
26.图13是示出传感器信号中产生的变动的变迁的例子的图。
27.图14是示出传感器信号中产生的变动的变迁的例子的图。
28.图15是示出传感器信号中产生的变动的变迁的例子的图。
29.图16是示出由断裂部引起的传感器信号的变动的例子的图。
30.图17是用于说明由转矩脉动的共振引起的传感器信号的变动的例子的图。
31.图18是示出提取部的功能的一例的图。
32.图19是用于说明提取部的安装例的图。
33.图20是示出输入到减法器的信号的例子的图。
34.图21是示出输入到减法器的信号的例子的图。
35.图22是示出输入到减法器的信号的例子的图。
36.图23是示出实现提取部的功能的另一例的图。
37.图24是用于说明再现性判定功能的例子的图。
38.图25是示出实施方式1的断裂检测装置的另一例的图。
39.图26是示出断裂部的例子的图。
40.图27是示出断裂部的例子的图。
41.图28是用于说明运算部以及判定部的功能的一例的图。
42.图29是示意性地示出电梯装置的图。
43.图30是用于说明传感器信号变动的例子的图。
44.图31是将反绳轮的剖面放大而得到的图。
45.图32是用于说明传感器信号变动的例子的图。
46.图33是示出实施方式2的断裂检测装置的例子的图。
47.图34是用于说明提取部的安装例的图。
48.图35是示出输入到减法器的信号的例子的图。
49.图36是用于说明提取部的功能的一例的图。
50.图37是示出实施方式2的断裂检测装置的另一例的图。
51.图38是示出提取部的一例的图。
52.图39是示出与低通滤波器相关的安装例的图。
53.图40是用于说明提取功能的另一例的图。
54.图41是示出提取部的安装例的图。
55.图42是示出提取部的另一安装例的图。
56.图43是示出控制装置的硬件资源的例子的图。
57.图44是示出控制装置的硬件资源的另一例的图。
具体实施方式
58.参照附图对本发明进行说明。适当简化或省略重复的说明。在各图中,相同的标号表示相同的部分或相当的部分。
59.实施方式1
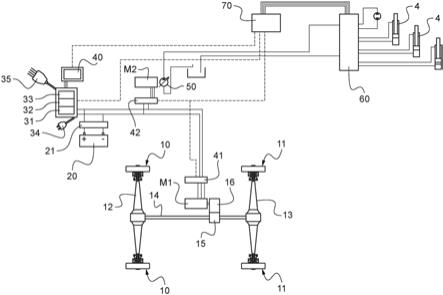
60.图1是示意性地示出电梯装置的图。电梯装置具备轿厢1以及对重2。轿厢1在井道3中上下移动。对重2在井道3中上下移动。轿厢1及对重2借助于主绳索4被吊挂于井道3中。图1示出轿厢1及对重2以2:1绕绳方式吊挂于井道3中的例子。绕绳方式不限于图1所示的例子。轿厢1及对重2也可以以1:1绕绳方式吊挂于井道3中。
61.在图1所示的例子中,主绳索4的一方的端部4a支承于设置于井道3的顶部的固定体。主绳索4从端部4a向下方延伸。主绳索4从端部4a侧起绕挂于吊轮5、吊轮6、反绳轮7、驱动绳轮8、反绳轮9以及吊轮10。主绳索4从绕挂于吊轮10的部分向上方延伸。主绳索4的另一方的端部4b支承于设置于井道3的顶部的固定体。
62.吊轮5及吊轮6设置于轿厢1。吊轮5及吊轮6例如以能够旋转的方式设置于支承轿厢地板的部件。反绳轮7及反绳轮9例如以能够旋转的方式设置于配置于井道3的顶部的部件。驱动绳轮8设置于曳引机11。曳引机11例如设置于井道3的底坑。吊轮10设置于对重2。吊轮10例如以能够旋转的方式设置于支承调整配重的框架。
63.绕挂有主绳索4的滑轮的配置不限于图1所示的例子。例如,驱动绳轮8也可以配置于井道3的顶部。驱动绳轮8也可以配置于井道3的上方的机房(未图示)。电梯装置也可以具备图1未示出的其它滑轮。
64.称量装置12对轿厢1的负荷进行检测。图1示出称量装置12根据施加于主绳索4的端部4a的负荷检测出轿厢1的负荷的例子。称量装置12输出与检测出的负荷对应的称量信号。从称量装置12输出的称量信号被输入到控制装置13。
65.曳引机11具有检测转矩的功能。曳引机11输出与检测出的转矩对应的转矩信号。从曳引机11输出的转矩信号被输入到控制装置13。
66.控制装置13对曳引机11进行控制。控制装置13运算针对曳引机11的转速、即驱动绳轮8的转速的指令值。轿厢1当驱动绳轮8旋转时移动。在本实施方式所示的例子中,曳引
机11的转速与轿厢1的速度具有对应关系。此外,曳引机11具备编码器14(在图1中未图示)。编码器14输出与驱动绳轮8的旋转方向及旋转角度对应的旋转信号。从编码器14输出的旋转信号被输入到控制装置13。
67.限速器15当轿厢1的下降速度超过基准速度时,使紧急停止装置(未图示)动作。紧急停止装置设置于轿厢1。紧急停止装置在动作时,强制性地使轿厢1停止。限速器15例如具备限速绳索16、限速绳轮17以及编码器18。限速绳索16与轿厢1连结。限速绳索16绕挂于限速绳轮17。当轿厢1移动时,限速绳索16移动。当限速绳索16移动时,限速绳轮17旋转。编码器18输出与限速绳轮17的旋转方向及旋转角度对应的旋转信号。从编码器18输出的旋转信号被输入到控制装置13。
68.控制装置13例如具备速度检测部21、位置检测部22以及信号生成部23。速度检测部21对轿厢1的速度进行检测。速度检测部21例如根据来自编码器14的旋转信号来检测轿厢1的速度。速度检测部21也可以根据来自编码器18的旋转信号来检测轿厢1的速度。
69.位置检测部22对轿厢1的位置进行检测。在本实施方式所示的例子中,轿厢1仅上下移动。因此,轿厢1的位置与轿厢1存在的高度同义。位置检测部22例如根据来自编码器14的旋转信号来检测轿厢1的位置。位置检测部22也可以根据来自编码器18的旋转信号来检测轿厢1的位置。编码器14是输出与轿厢1的位置对应的信号的传感器的一例。同样地,编码器18是输出与轿厢1的位置对应的信号的传感器的一例。
70.信号生成部23生成速度偏差信号。速度偏差信号是与曳引机11的转速的实测值和针对曳引机11的转速的指令值之差对应的信号。信号生成部23根据来自编码器14或编码器18的旋转信号和针对曳引机11的速度指令生成速度偏差信号。为了生成速度偏差信号,信号生成部23也可以利用速度检测部21的检测值。
71.图2是示出反绳轮7的例子的立体图。图3是示出反绳轮7的剖面的图。在支承反绳轮7的部件设有防脱部件19。例如,防脱部件19设置于反绳轮7的轴7a。主绳索4绕挂于反绳轮7的槽中。防脱部件19用于防止主绳索4从反绳轮7的槽脱出的情况。防脱部件19与主绳索4隔开规定的间隙地对置。
72.防脱部件19例如具备对置部19a以及对置部19b。对置部19a与主绳索4中的、主绳索4远离反绳轮7的一方的部分对置。对置部19b与主绳索4中的、主绳索4远离反绳轮7的另一方的部分对置。反绳轮7配置于对置部19a与对置部19b之间。如果主绳索4未发生异常,则主绳索4不会与防脱部件19接触。
73.图2及图3示出断裂部4c从主绳索4的表面突出的例子。主绳索4通过将多根股线捻合而形成。股线通过将多根线材捻合而形成。断裂部4c是线材断裂的部分。断裂部4c也可以是股线断裂的部分。当轿厢1移动时,断裂部4c经过反绳轮7。断裂部4c在经过反绳轮7时能够与防脱部件19接触。
74.图2及图3示出反绳轮7作为绕挂有主绳索4的滑轮的一例。也可以针对吊轮5这样的其它滑轮设置防脱部件。也可以针对图1未示出的其它滑轮设置防脱部件。
75.图4至图6是用于说明主绳索4的断裂部4c的移动的图。图4示出轿厢1停靠于最下层的层站的状态。如果轿厢1停靠于最下层的层站,则断裂部4c存在于主绳索4中从端部4a至绕挂于吊轮5的部分之间。
76.图6示出轿厢1停靠于最上层的层站的状态。如果轿厢1停靠于最上层的层站,则断
裂部4c存在于主绳索4中从绕挂于反绳轮7的部分至绕挂于驱动绳轮8的部分之间。即,当轿厢1从最下层的层站向最上层的层站移动时,断裂部4c会经过吊轮5、吊轮6以及反绳轮7。即使轿厢1从最下层的层站向最上层的层站移动,断裂部4c也不经过驱动绳轮8、反绳轮9以及吊轮10。即使产生了断裂部4c,该断裂部4c也并不经过绕挂有主绳索4的全部滑轮。断裂部4c所经过的滑轮的组合是根据产生该断裂部4c的位置等而决定的。
77.图5示出轿厢1从最下层的层站向最上层的层站移动的中途的状态。图5示出断裂部4c正经过吊轮5的状态。例如,针对吊轮5设有防脱部件。断裂部4c在经过吊轮5时会与防脱部件接触。
78.图7是示出来自传感器的输出信号的例子的图。在以下的说明中,将从传感器输出的信号也记作传感器信号。图7a示出轿厢1的位置。图7a示出轿厢1从最下层移动至位置p后返回到最下层时的轿厢位置的变化。在图7a中,最下层的轿厢位置为0。图7a所示的波形例如是根据来自编码器14的旋转信号而取得的。
79.图7b示出传感器信号的一例。具体而言,图7b示出曳引机11的转矩。图7b所示的波形是在轿厢1在最下层与位置p之间进行了移动时从曳引机11输出的转矩信号的波形。在图7b中,最大转矩为tq1。在图7b中,最小转矩为
‑
tq2。
80.图7c示出传感器信号的一例。具体而言,图7c示出相对于曳引机11的速度偏差。图7c所示的波形示出在轿厢1在最下层与位置p之间进行了移动时信号生成部23所生成的速度偏差信号的波形。
81.图7d示出传感器信号的一例。图7d示出轿厢1的负荷。图7d所示的波形是从称量装置12输出的称量信号的波形。图7d示出由称量装置12检测出的负荷为w[kg]的例子。
[0082]
图7b、图7c及图7d示出理想的传感器信号的波形。但是,在实际的传感器信号中,由于各种原由会产生变动。以下,对传感器信号中产生的变动进行说明。
[0083]
图8是示出来自传感器的输出信号的例子的图。图8a是与图7a对应的图。图8b是与图7b对应的图。图8c是与图7c对应的图。图8d是与图7d对应的图。图8示出在主绳索4存在断裂部4c的情况下得到的波形的例子。
[0084]
断裂部4c在轿厢1经过位置p1时经过某个滑轮。例如,断裂部4c在轿厢1经过位置p1时经过反绳轮7。断裂部4c在经过反绳轮7时与防脱部件19接触。由此,在轿厢1经过位置p1时,主绳索4发生振动。当主绳索4的端部4a移位时,从称量装置12输出的称量信号受到影响。即,当主绳索4发生的振动到达端部4a时,来自称量装置12的称量信号产生变动。
[0085]
同样地,当主绳索4中的绕挂于驱动绳轮8的部分移位时,该位移会对驱动绳轮8的旋转产生影响。因此,当主绳索4发生的振动到达该部分时,由信号生成部23生成的速度偏差信号中产生变动。此外,当主绳索4中的绕挂于驱动绳轮8的部分移位时,从曳引机11输出的转矩信号受到影响。因此,当主绳索4发生的振动到达该部分时,来自曳引机11的转矩信号中产生变动。
[0086]
这样,当在主绳索4存在断裂部4c时,有时传感器信号会发生变动。由断裂部4c引起的传感器信号的变动在相同的轿厢位置处会反复发生。此外,断裂部4c会由于线材的断裂而突然产生。因此,由断裂部4c引起的传感器信号的变动突发性地发生。
[0087]
图9是用于说明传感器信号变动的例子的图。图9a示出曳引机11的转速。图9a示出轿厢1从最下层移动至位置p时的曳引机11的转速。在图9所示的例子中,至时刻t4为止轿厢
1加速。在从时刻t4到时刻t5的期间,轿厢1以恒定的速度移动。轿厢1从时刻t5起开始减速。
[0088]
图9b示出曳引机11的转矩脉动的频率。在设曳引机11的转速为v(t)、驱动绳轮8的直径为r、曳引机11的角频率为ω0(t)时,(1)式成立。
[0089]
ω0(t)=v(t)/r
…
(1)
[0090]
此外,在设曳引机11的转矩脉动的角频率为ω(t)、曳引机11的转矩脉动的频率为f(t)时,(2)式及(3)式成立。
[0091]
ω(t)=αω0(t)
…
(2)
[0092]
f(t)=ω(t)/(2π)
…
(3)
[0093]
α是常数。根据(1)式及(2)式能够得到(4)式。
[0094]
ω(t)=αv(t)/r
…
(4)
[0095]
根据(3)式及(4)式能够得到(5)式。
[0096]
f(t)=αv(t)/(2πr)
…
(5)
[0097]
如(5)式所示,曳引机11的转矩脉动的角频率与曳引机11的转速成比例。因此,如果曳引机11的转速模式如图9a所示为梯形,则曳引机11的转矩脉动的频率模式也成为如图9b所示的梯形。
[0098]
曲线fn(t)示出电梯的机械系统的二次模式的固有振动频率。图9b示出曳引机11的转矩脉动的频率f(t)在时刻t3以及时刻t6与固有振动频率fn(t)交叉的例子。当转矩脉动的频率f(t)与固有振动频率fn(t)交叉时,发生共振。
[0099]
图9c示出传感器信号的一例。具体而言,图9c示出曳引机11的转矩。图9c所示的波形是在轿厢1从最下层移动至位置p时从曳引机11输出的转矩信号的波形。当在时刻t3发生共振时,来自曳引机11的转矩信号产生变动。例如,在电梯的机械系统的振动模式中的特定的振动模式由于共振而被激发的情况下,转矩信号及速度偏差信号容易产生变动。上述特定的振动模式例如是如下模式:轿厢1及对重2达到主绳索4振动的波节,绕挂有主绳索4的各滑轮在旋转方向上振动。
[0100]
这样的由转矩脉动的共振引起的传感器信号的变动取决于曳引机11的转速、即轿厢1的速度。即,由转矩脉动的共振引起的传感器信号的变动每当在曳引机11的转速成为v1时反复发生。另外,如果不进行改变轿厢1的加速度那样的控制,则例如当轿厢1从最下层开始行驶时,曳引机11的转速会总是在相同的轿厢位置处变为v1。因此,由转矩脉动的共振引起的传感器信号的变动在曳引机11的转速变为v1的轿厢位置处反复发生。此外,由转矩脉动的共振引起的传感器信号的变动具有随着时间的经过而变大的倾向。
[0101]
传感器信号产生变动的原因不限于上述例子。由于主绳索4绕挂于滑轮,因此在主绳索4与滑轮之间存在摩擦。此外,在轿厢1所具备的引导部件与导轨之间存在摩擦。因此,即使只是轿厢1移动,由这样的摩擦引起的变动也会在传感器信号中发生。另外,若仅着眼于特定的轿厢速度,则由摩擦引起的传感器信号的变动会反复发生。同样地,若仅着眼于特定的轿厢位置,则由摩擦引起的传感器信号的变动会反复发生。由摩擦引起的传感器信号的变动像dc分量一样,并不随着时间的经过而增大。
[0102]
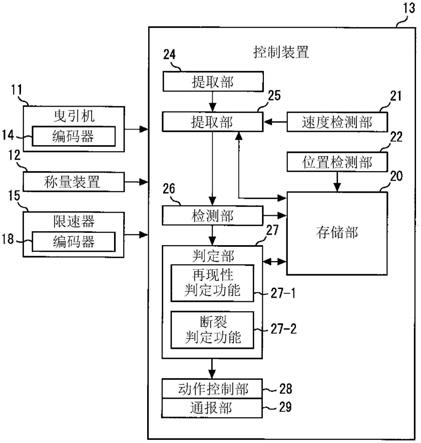
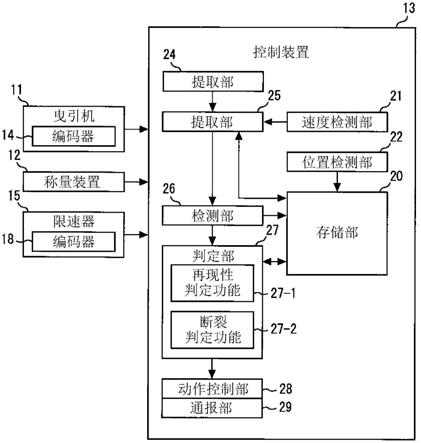
图10是示出实施方式1的断裂检测装置的例子的图。控制装置13例如还具备存储部20、提取部24、提取部25、检测部26、判定部27、动作控制部28以及通报部29。图10示出控制装置13具备检测存在于主绳索4的断裂部4c的功能的例子。也可以将用于检测断裂部4c
的专用装置设置于电梯装置中。以下,也参照图11至图24,对断裂检测装置的功能以及动作详细地进行说明。图11是示出实施方式1的断裂检测装置的动作例的流程图。
[0103]
提取部24从传感器信号中提取特定频带的振动分量(s101)。在本实施方式所示的例子中,称量信号、速度偏差信号以及转矩信号均可以用作传感器信号。作为另一例,也可以将来自设置于轿厢1的加速度计(未图示)的加速度信号用作传感器信号。在以下内容中,对使用转矩信号作为传感器信号的例子详细地叙述。例如,提取部24从转矩信号中提取特定频带的振动分量。
[0104]
当断裂部4c与防脱部件19接触时,来自曳引机11的转矩信号会出现异常的变动。该异常变动具有与断裂部4c的长度和主绳索4的速度对应的固有的频带的振动分量。如图3所示,在设断裂部4c的长度为d[m]、主绳索4的速度为v
r
[m/s]时,异常变动的频率f[hz]由式(6)来表示。
[0105]
f=v
r
/d
…
(6)
[0106]
图12是示出提取部24的功能的一例的图。提取部24例如具备带通滤波器40。为了简化记载,在附图等中也将带通滤波器记作bpf。带通滤波器40被输入来自曳引机11的转矩信号。带通滤波器40从所输入的转矩信号中提取包含(6)式所示的频率f的特定频带的振动分量。断裂部4c的长度d是预先设定的。例如,假定由于0.5间距至几间距的量的股线松开而形成断裂部4c,该松开了的股线的长度被设定为长度d。主绳索4的速度v
r
是根据轿厢1的速度决定的。也可以根据轿厢1的额定速度计算出主绳索4的速度。
[0107]
如图12所示,提取部24也可以还具备放大器41。放大器41例如对信号u进行平方。在提取部24中,也可以进一步求出从放大器41输出的信号u2的平方根。在提取部24中,也可以求出信号u的绝对值,使输出信号的符号为正。在以下的说明中,将从提取部24输出的信号记作输出信号y。在提取部24具备带通滤波器40的情况下,将从提取部24输出的信号也记作带通滤波器40的输出信号y。
[0108]
图12示出提取部24具备带通滤波器40以针对所输入的转矩信号进行滤波处理的例子。提取部24也可以具备非线性滤波器以提取特定频带的振动分量。也可以对提取部24应用自适应滤波器的算法,提取出特定频带的振动分量。
[0109]
提取部25从由提取部24提取出的振动分量中提取判定信号(s102)。判定信号是为了判定传感器信号发生了突发性的变动的情况所需的信号。提取部25通过从由提取部24提取出的振动分量中使趋势分量衰减而得到判定信号。趋势分量是指示出例如最近1000次左右的轿厢1的行驶中的振动的长期性变化倾向的分量。趋势分量中例如包含稳定振动分量以及渐增振动分量。
[0110]
图13至图15是示出传感器信号中产生的变动的变迁的例子的图。在图13至图15中,纵轴示出与传感器信号中产生的变动的振幅对应的值。横轴示出电梯的起动次数。横轴也可以是从安装电梯起的经过时间。横轴也可以是轿厢1经过了特定的位置的次数。
[0111]
图13示出轿厢1经过位置p1时所得到的输出信号y的值。在起动次数为m1的时刻,主绳索4未产生断裂部4c。图13示出在起动次数为m2时主绳索4产生了断裂部4c的例子。如上所述,断裂部4c由于线材的断裂而突然产生。因此,由断裂部4c引起的传感器信号的变动突发性地发生。当在主绳索4产生断裂部4c时,输出信号y的值相较于之前的值突然增大。
[0112]
图16是示出由断裂部4c引起的传感器信号的变动的例子的图。图16示出在主绳索
4产生了断裂部4c之后轿厢1在最下层与位置p之间进行了两个往返的例子。在图16所示的例子中,轿厢1在时刻t1、时刻t2、时刻t7以及时刻t8经过位置p1。图16b示出曳引机11的转矩。图16c示出输出信号y的值。当在主绳索4产生断裂部4c时,每当轿厢1经过位置p1时,断裂部4c就可能与防脱部件19接触。因此,如图13所示,当在主绳索4产生断裂部4c时,位置p1处的输出信号y的值在那之后也继续示出较大的值。
[0113]
图14示出在轿厢1经过位置p2时所得到的输出信号y的值。位置p2例如是在轿厢1从最下层刚开始行驶之后曳引机11的转速变为v1的位置。如上所述,由转矩脉动的共振引起的传感器信号的变动取决于曳引机11的转速、即轿厢1的速度。但是,由于轿厢1停靠的位置是确定的,因此发生由转矩脉动的共振引起的传感器信号变动的位置具有再现性。
[0114]
图17是用于说明由转矩脉动的共振引起的传感器信号变动的例子的图。例如,当轿厢1从最下层开始行驶时,在刚开始行驶之后的时刻t3,曳引机11的转速变为v1。因此,在时刻t3,输出信号y的值示出较大的值。
[0115]
在图17中,f1(t)示出轿厢1停靠于4层时的转矩脉动的频率。f2(t)示出轿厢1停靠于6层时的转矩脉动的频率。在轿厢1停靠于4层的情况下,在时刻t9,曳引机11的转速变为v1。因此,在轿厢1停靠于4层的情况下,在时刻t9,输出信号y的值示出较大的值。另一方面,在轿厢1停靠于6层的情况下,在时刻t9前后,曳引机11的转速不为v1。因此,在轿厢1经过4层的情况下,在时刻t9前后,输出信号y的值不会示出较大的值。即,由转矩脉动的共振引起的传感器信号变动取决于轿厢1的速度,而不总是取决于轿厢1的位置。但是,发生由转矩脉动的共振引起的传感器信号变动的位置具有再现性。
[0116]
图14示出具有渐增振动分量的输出信号y的例子。渐增振动分量是由提取部24提取出的振动分量中花费时间缓慢成长的振动分量。如图14所示,由转矩脉动的共振引起的传感器信号变动具有随时间经过而逐渐变大的倾向。提取部25使这样的取决于轿厢1的速度的渐增振动分量衰减。
[0117]
图15示出轿厢1以某个速度移动时所得到的输出信号y的值。如图15所示,由摩擦引起的传感器信号的变动始终示出相同的值。图15示出具有稳定振动分量的输出信号y的例子。稳定振动分量是由提取部24提取出的振动分量中、像dc分量那样的稳定地产生的振动分量。稳定振动分量也可以包含变动比渐增振动分量更迟缓的振动分量。提取部25使这样的取决于轿厢1的速度的稳定振动分量衰减。
[0118]
图18是示出提取部25的功能的一例的图。提取部25例如具备低通滤波器42以及减法器43。为了简化记载,在附图等中,也将低通滤波器记作lpf。低通滤波器42被输入带通滤波器40的输出信号y。减法器43被输入带通滤波器40的输出信号y和低通滤波器42的输出信号z。减法器43将带通滤波器40的输出信号y与低通滤波器42的输出信号z的差分信号y
‑
z作为判定信号输出。减法器43的输出信号y
‑
z被输入到检测部26。
[0119]
图19是用于说明提取部24及提取部25的安装例的图。图19a示出曳引机11的转矩。图19a的横轴示出轿厢1的速度。例如,在轿厢1加速时,图19a所示的转矩信号被输入到带通滤波器40。图19b示出放大器41的输出信号u2。放大器41的输出信号u2是连续的信号。提取部24如图19c所示那样对放大器41的输出信号u2进行离散化。提取部24将如图19c所示的离散化后的信号作为带通滤波器40的输出信号y输出。
[0120]
例如,将轿厢1在行驶时能够实现的速度的区间虚拟地分割为多个速度区间。图19
示出轿厢1的额定速度为90[m/min]、每15[m/min]设定速度区间的例子。即,轿厢1在行驶时能够实现的速度的区间为0~90[m/min]。例如,对上述区间进行等分。将轿厢速度0~15[m/min]的区间设定为第1速度区间。将轿厢速度15~30[m/min]的区间设定为第2速度区间。将轿厢速度30~45[m/min]的区间设定为第3速度区间。将轿厢速度45~60[m/min]的区间设定为第4速度区间。将轿厢速度60~75[m/min]的区间设定为第5速度区间。将轿厢速度75~90[m/min]的区间设定为第6速度区间。在图19c中,为了简化记载,也将第n速度区间记作区间n。包含于第(i 1)速度区间的速度大于包含于第i速度区间的速度。图19示出i的最大值n为6的例子。n的值也可以不为6。
[0121]
提取部24按每个速度区间提取一个信号,由此对连续的输出信号u2进行离散化。例如,提取部24提取出在一个速度区间中具有最大值的信号u2作为该速度区间的输出信号y。
[0122]
提取部25具备与各个速度区间对应的低通滤波器42。例如,将与第1速度区间对应的低通滤波器42记作滤波器42
‑
1。同样地,将与第2速度区间对应的低通滤波器42记作滤波器42
‑
2。将与第3速度区间对应的低通滤波器42记作滤波器42
‑
3。将与第i速度区间对应的低通滤波器42记作滤波器42
‑
i。
[0123]
滤波器42
‑
1被输入轿厢1以包含于第1速度区间的速度移动时的带通滤波器40的输出信号y。来自滤波器42
‑
1的输出信号z相当于第1速度区间中的趋势分量。来自滤波器42
‑
1的输出信号z被输入到减法器43。滤波器42
‑
2被输入轿厢1以包含于第2速度区间的速度移动时的带通滤波器40的输出信号y。来自滤波器42
‑
2的输出信号z相当于第2速度区间中的趋势分量。来自滤波器42
‑
2的输出信号z被输入到减法器43。
[0124]
滤波器42
‑
3被输入轿厢1以包含于第3速度区间的速度移动时的带通滤波器40的输出信号y。来自滤波器42
‑
3的输出信号z相当于第3速度区间中的趋势分量。来自滤波器42
‑
3的输出信号z被输入到减法器43。同样地,滤波器42
‑
i被输入轿厢1以包含于第i速度区间的速度移动时的带通滤波器40的输出信号y。来自滤波器42
‑
i的输出信号z相当于第i速度区间中的趋势分量。来自滤波器42
‑
i的输出信号z被输入到减法器43。
[0125]
减法器43将轿厢1以包含于第1速度区间的速度移动时的带通滤波器40的输出信号y和滤波器42
‑
1的输出信号z的差分信号作为第1速度区间中的判定信号输出。减法器43将轿厢1以包含于第2速度区间的速度移动时的带通滤波器40的输出信号y与滤波器42
‑
2的输出信号z的差分信号作为第2速度区间中的判定信号输出。减法器43将轿厢1以包含于第3速度区间的速度移动时的带通滤波器40的输出信号y与滤波器42
‑
3的输出信号z的差分信号作为第3速度区间中的判定信号输出。同样地,减法器43将轿厢1以包含于第i速度区间的速度移动时的带通滤波器40的输出信号y与滤波器42
‑
i的输出信号z的差分信号作为第i速度区间中的判定信号输出。
[0126]
图20至图22是示出输入到减法器43的信号的例子的图。在图20至图22中,黑圆点示出带通滤波器40的输出信号y。白四边形示出低通滤波器42的输出信号z。图20示出图13所示的输出信号y被输入到减法器43的例子。即,在起动次数m2时在主绳索4产生断裂部4c。如上所述,当在主绳索4产生断裂部4c时,输出信号y突然增大。另一方面,低通滤波器42的输出信号z不追随输出信号y的急剧变化。因此,输出信号y与输出信号z的差由于在主绳索4产生断裂部4c而突然增大。在断裂部4c产生之后,输出信号y与输出信号z的差逐渐减小。
[0127]
图21示出图14所示的输出信号y被输入到减法器43的例子。如上所述,曳引机11的转速为v1时的输出信号y的值逐渐增大。在输出信号y中出现如图14所示那样的缓慢的变化的情况下,输出信号z追随输出信号y的变化。因此,在图21所示的例子中,输出信号y与输出信号z成为相同的值。
[0128]
图22示出图15所示的输出信号y被输入到减法器43的例子。在输出信号y中出现如图15所示那样的缓慢的变化的情况下,输出信号z追随输出信号y的变化。因此,在图22所示的例子中,输出信号y与输出信号z也成为相同的值。
[0129]
另外,为了防止误检测,优选设定不为0的值作为低通滤波器42的初始值。当输出0作为低通滤波器42的输出信号z的初始值时,例如,当由于轿厢1经过曳引机11的转速为v1的位置而输出较大的值作为输出信号y的初始值时,判定信号y
‑
z的值突然增大而发生误检测。这时的判定信号y
‑
z是输出信号y的初始值与输出信号z的初始值的差分。只要将不为0的值设定为输出信号z的初始值,即使输出较大的值作为输出信号y的初始值,判定信号y
‑
z的值也不会突然增大。因此,能够防止误检测。优选例如将对后述的阈值th1乘以大于等于1的系数而得到的值设定为低通滤波器42的初始值。
[0130]
图18及图19示出提取部25具备低通滤波器42的例子。提取部25也可以在不具备低通滤波器42的情况下提取出判定信号。例如,提取部25也可以根据带通滤波器40的输出信号y的移动平均值来运算振动的趋势分量。提取部25例如根据最近20次的输出信号y来运算移动平均值。作为另一例,提取部25也可以利用神经网络这样的机器学习算法来运算振动的趋势分量。即,提取部25也可以具备学习功能。上述仅是一例。提取部25例如也可以根据最近的任意次数的输出信号y来运算移动平均值。上述任意的次数例如为包含在10次~100次中的次数。
[0131]
图23是示出实现提取部25的功能的另一例的图。提取部25例如具备高通滤波器44。在图23中,为了简化记载,将高通滤波器记作hpf。在利用一阶延迟系统的传递函数来设计图18所示的低通滤波器42的情况下,减法器43的输出信号y
‑
z由(7)式来表示。
[0132]
y
‑
z=y
‑
y/(sτ 1)=ysτ/(sτ 1)
…
(7)
[0133]
在(7)式中,s是拉普拉斯算子。τ是时间常数。(7)式中的传递函数是1次高通滤波器的传递函数。即,提取部25在图23所示的例子中也能够实现与图18所示的例子相同的功能。在图23所示的例子中,高通滤波器44被输入带通滤波器40的输出信号y。高通滤波器44将相当于减法器43的输出信号y
‑
z的信号作为判定信号输出。
[0134]
提取部25具备高通滤波器44的情况下的安装例与图19所示的例子相同。其中,图19所示的低通滤波器42
‑
i是高通滤波器44
‑
i。即,提取部25具备与各个速度区间分别对应的高通滤波器44。此外,高通滤波器44
‑
i的输出不是z而是y
‑
z。
[0135]
检测部26根据由提取部25提取出的判定信号检测出传感器信号发生了异常的变动的情况(s103)。检测部26将在传感器信号中发生的突发性的变动作为异常的变动检测出来。例如,检测部26判定由提取部25提取出的判定信号的值是否超过阈值th1。在由提取部25提取出的判定信号的值超过阈值th1时,检测部26检测出传感器信号发生了异常的变动。阈值th1被预先存储于存储部20中。
[0136]
控制装置13也可以通过进行使轿厢1实际移动的特定的运转来设定阈值th1。例如,当电梯的安装完成时,进行用于设定阈值th1的设定运转。在设定运转中,轿厢1的速度
被加速到额定速度后,再减速到0。然后,在设定运转中将从提取部24输出的信号y存储于存储部20中。进而,将对存储于存储部20中的输出信号y的最大值乘以系数而得到的值设定为阈值th1。该系数为大于等于1的值。系数也可以是2。控制装置13也可以定期地进行用于更新阈值th1的更新运转。更新运转的内容也可以与设定运转的内容相同。例如,每个月进行更新运转。
[0137]
也可以在存储部20中预先存储阈值th1的下限值。例如,在通过设定运转而得到的阈值th1未达到下限值的情况下,将上述下限值设定为阈值th1。在通过更新运转而得到的阈值th1未达到下限值的情况下,将上述下限值设定为阈值th1。由此,能够防止极端小的值被设定为阈值th1的情况。
[0138]
当由检测部26检测出传感器信号发生了异常的变动时,将该变动发生时的轿厢位置存储于存储部20中。例如,将轿厢1进行移动的区间虚拟地分割为上下连续的多个位置区间。当检测部26检测出异常的变动时,将用于确定发生该变动的位置区间的信息存储于存储部20中。
[0139]
判定部27在由检测部26检测出传感器信号发生了异常的变动时,判定在主绳索4是否存在断裂部4c(s104)。判定部27根据异常的变动发生时的轿厢位置来进行上述判定。例如,判定部27具备再现性判定功能27
‑
1和断裂判定功能27
‑
2。再现性判定功能27
‑
1判定发生了异常的变动的轿厢位置是否具有再现性(s104
‑
1)。断裂判定功能27
‑
2根据再现性判定功能27
‑
1的判定结果来判定在主绳索4是否具有断裂部4c(s104
‑
2)。
[0140]
图24是用于说明再现性判定功能27
‑
1的例子的图。图24a示出在轿厢1从位置0移动了位置p时所得到的最新的判定信号。在图24a所示的例子中,在位置p1以及位置p4处,判定信号的值超过阈值th1。图24b示出在轿厢1上次移动了相同区间时所得到的判定信号。即,图24a所示的判定信号是在刚刚取得了图24b所示的判定信号之后轿厢1再次在相同区间移动而得到的信号。在图24b所示的例子中,在位置p1、位置p4以及位置p5处,判定信号的值超过阈值th1。
[0141]
再现性判定功能27
‑
1例如在轿厢1多次经过相同的位置时判定信号的值连续两次超过阈值th1时,判定为有再现性。在图24所示的例子中,在位置p1处,判定信号的值持续两次超过阈值th1。因此,再现性判定功能27
‑
1判定为在位置p1处有再现性。同样地,再现性判定功能27
‑
1判定为在位置p4处有再现性。
[0142]
另一方面,在位置p5处,判定信号的最新的值不超过阈值th1。因此,再现性判定功能27
‑
1判定为在位置p5处不具有再现性。判定为位置p5处的上次的值是起因于不具有再现性的现象而产生的。例如,判定为位置p5处的上次的值是由于乘客在轿厢1内跳起而产生的。
[0143]
在轿厢1移动的区间被分割为多个位置区间的情况下,例如进行如下所述的判定。如果在轿厢1多次经过相同的位置区间时判定信号的值连续两次超过阈值th1,则再现性判定功能27
‑
1判定为有再现性。例如,当轿厢1经过第5位置区间时所得到的判定信号的值连续两次超过阈值th1时,再现性判定功能27
‑
1判定为在第5位置区间有再现性。
[0144]
再现性判定功能27
‑
1也可以在判定信号的值连续3次超过阈值th1的情况下,判定为有再现性。用于判定为有再现性的上述次数是任意设定的。
[0145]
当由再现性判定功能27
‑
1判定为发生了异常的变动的轿厢位置具有再现性时,断
裂判定功能27
‑
2判定为在主绳索4产生了断裂部4c。当由断裂判定功能27
‑
2判定为产生了断裂部4c时,动作控制部28使轿厢1停靠于最近楼层(s105)。此外,通报部29向电梯的管理公司进行通报(s106)。
[0146]
在本实施方式所示的断裂检测装置中,利用在主绳索4发生振动时输出信号发生变动的传感器而检测出断裂部4c的存在。作为传感器信号,例如能够利用称量信号、速度偏差信号以及转矩信号。因此,不需要具备为了判定有无断裂部4c的专用的传感器。此外,只要存在至少一个传感器,就能够检测出断裂部4c的存在。为了判定断裂部4c的有无,不需要设置很多传感器。
[0147]
在本实施方式所示的断裂检测装置中,从由提取部24提取出的振动分量中使趋势分量衰减,由此提取出判定信号。具体而言,提取部25从由提取部24提取出的振动分量中使取决于轿厢1的速度的稳定振动分量以及渐增振动分量衰减,提取出判定信号。因此,即使例如在传感器信号中包含有由转矩脉动的共振引起的变动,检测精度也不会变差。如果是本实施方式所示的断裂检测装置,则能够高精度地检测出在主绳索4存在断裂部4c的情况。
[0148]
在本实施方式中,对在从轿厢1开始移动起至停靠为止的期间,断裂检测装置始终进行相同的动作的例子进行了说明。这仅是一例。例如,在电梯装置中,在轿厢1开始移动时,产生由轿厢1的质量与对重2的质量之差引起的速度控制的瞬态响应。因此,在轿厢1刚开始移动之后,来自曳引机11的转矩信号等容易产生变动。为了防止由于这样的变动而导致检测精度变差,也可以在轿厢1刚开始移动之后,停止提取部24的功能。或者,也可以在轿厢1刚开始移动之后,强制性地使带通滤波器40的输出信号y为0。作为另一例,也可以在轿厢1刚开始移动之后,停止提取部25的功能。作为另一例,也可以在轿厢1刚开始移动之后,强制性地使减法器43的输出信号y
‑
z为0。
[0149]
作为防止检测精度劣化的另一例,也可以是,在轿厢1刚开始移动之后,检测部26在判定信号的值超过阈值th2的情况下,检测出传感器信号发生了异常的变动。阈值th2是大于阈值th1的值。轿厢1刚开始移动之后是指例如从轿厢1开始移动之后直到轿厢1的速度达到速度v2为止的期间。速度v2被预先存储于存储部20中。轿厢1刚开始移动之后也可以是指从轿厢1开始移动之后直到轿厢1的加速度变为恒定为止的期间。
[0150]
同样地,在轿厢1即将停靠之前,来自曳引机11的转矩信号等容易产生变动。为了防止由于这样的变动导致检测精度变差,也可以在轿厢1即将停靠之前停止提取部24的功能。作为另一例,也可以在轿厢1即将停靠之前,强制性地使带通滤波器40的输出信号y为0。作为另一例,也可以在轿厢1即将停靠之前停止提取部25的功能。作为另一例,也可以在轿厢1即将停靠之前,强制性地使减法器43的输出信号y
‑
z为0。在轿厢1即将停靠之前,检测部26也可以在判定信号的值超过阈值th3的情况下,检测出传感器信号发生了异常的变动。阈值th3是大于阈值th1的值。轿厢1即将停靠之前是指例如轿厢1的速度比速度v3慢的期间。速度v3被预先存储于存储部20中。
[0151]
也可以在轿厢1刚开始移动之后以及轿厢1即将停靠之前双方的情况下,均进行用于防止检测精度变差的上述控制。轿厢1刚开始移动之后以及轿厢1即将停靠之前是指例如轿厢1的速度比速度v3慢的期间。
[0152]
在本实施方式所示的例子中,使用图19对提取部24及提取部25的安装例进行了说明。如上所述,图19a所示的转矩信号在轿厢1加速时被输入到带通滤波器40。另一方面,在
轿厢1从某个楼层向其它楼层移动的情况下,如图19a所示的转矩信号在轿厢1减速时也被输入到带通滤波器40。本实施方式所示的例子相当于不对轿厢1加速时和减速时加以区分地,针对各个速度区间分别设定有共用的存储区域的例子。即,提取部25从由提取部24提取出的振动分量中使加速时和减速时的平均趋势分量衰减,由此提取出判定信号。
[0153]
作为另一例,提取部25也可以比较加速时的趋势分量和减速时的趋势分量,使较大的一方的趋势分量从由提取部24提取出的振动分量中衰减。在轿厢1的一次的行驶中,具有轿厢1加速的区间和轿厢1减速的区间。例如,提取部25比较轿厢1在加速时以包含于第1速度区间的速度移动时的带通滤波器40的输出信号y
a
和轿厢1在减速时以包含于第1速度区间的速度移动时的带通滤波器40的输出信号y
d
。提取部25比较输出信号y
a
和输出信号y
d
,采用较大的一方作为第1速度区间中的输出信号y,将其输入到滤波器42
‑
1。
[0154]
作为另一例,也可以对轿厢1加速时与减速时进行区分,针对各个速度区间分别设定加速时用存储区域和减速时用存储区域。即,提取部25在轿厢1加速时,从由提取部24提取出的振动分量中使取决于轿厢1加速时的速度的稳定振动分量以及渐增振动分量衰减,由此提取出判定信号。提取部25在轿厢1减速时,从由提取部24提取出的振动分量中使取决于轿厢1减速时的速度的稳定振动分量以及渐增振动分量衰减,由此提取出判定信号。由此,能够进一步提高检测精度。
[0155]
在本实施方式中,对不考虑轿厢1的移动方向地检测断裂部4c的存在的例子进行了说明。这仅是一例。也可以分为轿厢1向上方移动的情况和轿厢1向下方移动的情况来检测断裂部4c的存在。例如,当由检测部26检测出传感器信号发生了异常的变动时,将该变动发生时的轿厢位置和轿厢1的移动方向存储于存储部20中。再现性判定功能27
‑
1也考虑轿厢1的移动方向,来判定发生了异常的变动的轿厢位置是否具有再现性。
[0156]
在本实施方式中,对在某个轿厢位置处判定信号的值连续多次超过阈值th1的情况下判定为有再现性的例子进行了说明。这仅是一例。判定部27也可以根据由检测部26检测出轿厢1经过相同的位置时发生了异常的变动的频度,来判定在主绳索4是否存在断裂部4c。
[0157]
图25是示出实施方式1的断裂检测装置的另一例的图。在图25所示的例子中,与图10所示的例子的不同点在于控制装置13具备运算部30。
[0158]
在图25所示的例子中,在存储部20中存储有用于判定是否存在断裂部4c的判定分数。运算部30根据检测部26检测出的结果,运算出判定分数。例如,当由检测部26检测出传感器信号发生了异常的变动时,将该变动发生时的轿厢位置与判定分数关联起来存储于存储部20中。判定部27根据存储于存储部20中的判定分数来判定在主绳索4是否存在断裂部4c。在轿厢1进行移动的区间被分割为多个位置区间的情况下,将与各个位置区间分别对应的判定分数存储于存储部20中。
[0159]
图26及图27是示出断裂部4c的例子的图。图26及图27是相当于图3的a
‑
a剖面的图。图26示出断裂部4c随着越靠近末端而越远离反绳轮7的例子。在断裂部4c如图26所示从主绳索4的表面突出的情况下,断裂部4c在经过反绳轮7时会与防脱部件19接触。图27示出断裂部4c沿着反绳轮7的表面配置的例子。在断裂部4c如图27所示那样从主绳索4的表面突出的情况下,断裂部4c在经过反绳轮7时不与防脱部件19接触。因此,即使断裂部4c经过反绳轮7,主绳索4也不会发生振动。
[0160]
断裂部4c有时由于与防脱部件19接触而使得朝向发生变化。当断裂部4c的朝向从图26所示的朝向变化为图27所示的朝向时,即使断裂部4c经过反绳轮7,主绳索4也不会发生振动。另一方面,断裂部4c有时在经过反绳轮7时被槽的表面按压而使得朝向发生变化。断裂部4c有时由于线材或股线进一步松开而导致朝向发生变化。当断裂部4c的朝向从图27所示的朝向变化为图26所示的朝向时,在断裂部4c经过反绳轮7时,主绳索4发生振动。
[0161]
图28是用于说明运算部30以及判定部27的功能的一例的图。图28a示出轿厢1的位置。图28b示出曳引机11的转矩。图28c示出判定信号。图28d示出判定分数的变迁的例子。
[0162]
图28示出轿厢1在最下层与位置p之间进行了两个往返的例子。轿厢1在时刻t1、时刻t2、时刻t7以及时刻t8经过位置p1。此外,图28示出在主绳索4存在断裂部4c的例子。断裂部4c在时刻t1、时刻t2、时刻t7以及时刻t8经过反绳轮7。如上所述,即使在主绳索4存在断裂部4c,断裂部4c也不一定总是与防脱部件19接触。在图28所示的例子中,在时刻t1、时刻t7以及时刻t8,断裂部4c与防脱部件19接触。断裂部4c在时刻t2不与防脱部件19接触。
[0163]
例如,当断裂部4c在时刻t1与防脱部件19接触时,判定信号的值超过阈值th1。由此,检测部26检测出传感器信号发生了异常的变动的情况。例如,考虑位置p1包含于第8位置区间中的情况。在时刻t1,第8位置区间的判定分数被设定为初始值。初始值例如为0。运算部30在由检测部26检测出轿厢1在经过第8位置区间时发生了异常的变动时,对第8位置区间的判定分数加上规定值。图28d示出所加的规定值为5的例子。
[0164]
判定部27判定存储于存储部20中的判定分数是否超过阈值th4。阈值th4预先存储于存储部20中。图28d示出阈值th4为10的例子。在时刻t1,第8位置区间的判定分数不超过阈值th4。如果判定分数不超过阈值th4,则判定部27判定为在主绳索4不存在断裂部4c。
[0165]
轿厢1在时刻t2再次经过位置p1。在时刻t2,断裂部4c不与防脱部件19接触。如果在经过判定分数不为0的位置时检测部26未检测出发生了异常的变动,则运算部30要对该位置的判定分数进行减分。在时刻t2,第8位置区间的判定分数不为0。运算部30在时刻t2,从第8位置区间的判定分数中减去规定值。图28d示出所减的规定值为1的例子。
[0166]
轿厢1在时刻t7再次经过位置p1。检测部26在时刻t7检测出传感器信号发生了异常的变动。因此,运算部30对存储于存储部20中的第8位置区间的判定分数加5。在时刻t7,第8位置区间的判定分数不超过阈值th4。因此,判定部27判定为在主绳索4不存在断裂部4c。
[0167]
之后,轿厢1在时刻t8再次经过位置p1。检测部26检测出在时刻t8传感器信号发生了异常的变动。因此,运算部30对存储于存储部20中的第8位置区间的判定分数再加5。存储于存储部20中的第8位置区间的判定分数在时刻t8成为14。在时刻t8,第8位置区间的判定分数超过阈值th4。由此,判定部27判定在时刻t8在主绳索4存在断裂部4c。
[0168]
如果是图28所示的例子,则即使产生断裂部4c不与防脱部件19接触的时间段,也能够高精度地检测出断裂部4c的存在。
[0169]
当在未将轿厢1进行移动的区间分割为多个位置区间的情况下,在轿厢1再次经过存储于存储部20中的轿厢位置时由检测部26检测出异常的变动时,对该位置的判定分数加上规定值。如果在轿厢1再次经过该位置时检测部26未检测出异常的变动,则从该位置的判定分数减去规定值。在这样的情况下,只要是距存储于存储部20中的轿厢位置在基准距离以内的位置,就可以视为相同的轿厢位置。上述基准距离例如是根据从断裂部4c与对置部19a接触起至与对置部19b接触为止主绳索4所移动的距离来设定的。
[0170]
阈值th4优选为与判定分数相加的值的2倍以上的值。只要阈值th4为与判定分数相加的值的2倍以上的值,就能够抑制由不具有再现性的现象导致的误检测。此外,也考虑到断裂部4c不会连续地与防脱部件19接触的可能性,从判定分数中减去的值优选为相加的值的2分之1以下的值。
[0171]
阈值th4也可以根据判定信号的大小而可变。例如,预先设定第1值和第2值作为阈值th4。第2值是大于第1值的值。在判定信号的大小在基准值以下的情况下,使用第2值作为阈值th4。即,在传感器信号发生了使得判定信号的大小超过基准值那样的变动的情况下,能够尽早检测出断裂部4c的存在。作为一例,在满足下述条件1的情况下,将阈值th4设定为15。在满足下述条件2的情况下,将阈值th4设定为10。
[0172]
条件1:[阈值th1]≤[判定信号]≤2
×
[阈值th1]
[0173]
条件2:2
×
[阈值th1]<[判定信号]
[0174]
实施方式2
[0175]
在实施方式1中,对从特定频带的振动分量中使取决于轿厢1的速度的稳定振动分量和渐增振动分量衰减而由此提取出判定信号的例子进行了说明。在本实施方式中,对也考虑取决于轿厢1的位置的稳定振动分量以及渐增振动分量的例子进行说明。关于断裂检测装置所具备的功能中的在本实施方式中未说明的功能,可以采用在实施方式1中所公开的任何功能。
[0176]
首先,对传感器信号中产生的变动的例子进行说明。图29是示意性地示出电梯装置的图。在图29中,省略了控制装置13以及限速器15。在井道3中设有用于引导轿厢1的移动的导轨。导轨具备很多轨道部件45。很多轨道部件45被上下连接,从而可以在轿厢1的移动范围内配置导轨。因此,导轨存在轨道部件45的接缝。
[0177]
导轨被供给油。当供给至导轨的油变得枯竭时,在轿厢1经过轨道部件45的接缝时,轿厢1会稍稍摇晃。主绳索4绕挂于吊轮5及吊轮6上。因此,当轿厢1摇晃时,主绳索4发生振动。当供给至导轨的油枯竭时,在轿厢1经过轨道部件45的接缝时,传感器信号产生变动。当轨道部件45的接缝具有阶梯差时,传感器信号中产生的变动增大。
[0178]
图30是用于说明传感器信号变动的例子的图。图30a是与图7a对应的图。图30b是与图7b对应的图。图30c是与图7c对应的图。图30d是与图7d对应的图。图30示出供给至导轨的油变得枯竭时所得到的波形的例子。
[0179]
轿厢1在位置p3处经过轨道部件45的某个接缝。在轿厢1经过该接缝时,轿厢1稍稍摇晃。由此,主绳索4发生振动,来自称量装置12的称量信号产生变动。同样地,在轿厢1经过位置p3时,信号生成部23生成的速度偏差信号产生变动。在轿厢1经过位置p3时,来自曳引机11的转矩信号产生变动。
[0180]
当供给至导轨的油的供给量减少时,有时在轿厢1经过轨道部件45的接缝时传感器信号发生变动。由轨道部件45的接缝引起的传感器信号的变动在相同的轿厢位置处反复发生。此外,由于导轨表面的油量逐渐减少,因此,由轨道部件45的接缝引起的传感器信号的变动随着时间的经过而增大。
[0181]
图31是将反绳轮7的剖面放大而得到的图。图31相当于将图26的一部分放大而得到的图。图31示出形成于反绳轮7的槽发生了磨损的例子。在图31中,用标号o表示槽磨损前的主绳索4的中心。用标号o
′
表示槽发生了磨损时的主绳索4的中心。如图31所示,当形成于
反绳轮7的槽磨损时,主绳索4的经过位置偏移。主绳索4的经过位置的偏移也由于反绳轮7的轴7a的偏移而发生。并且,当在主绳索4的经过位置发生偏移时,每当反绳轮7旋转时,主绳索4就会发生振动。即,由于轿厢1的移动而使得传感器信号产生变动。
[0182]
图32是用于说明传感器信号变动的例子的图。图32a是与图7a对应的图。图32b是与图7b对应的图。图32c是与图7c对应的图。图32d是与图7d对应的图。图32示出形成于反绳轮7的槽发生了磨损时所得到的波形的例子。
[0183]
当形成于反绳轮7的槽磨损时,由于轿厢1的移动而导致主绳索4发生振动。由此,导致来自称量装置12的称量信号产生变动。同样地,当轿厢1移动时,信号生成部23生成的速度偏差信号中产生变动。当轿厢1移动时,来自曳引机11的转矩信号产生变动。
[0184]
这样,当滑轮发生异常时,有时由于轿厢1的移动而导致传感器信号发生振动。这样的由滑轮异常引起的传感器信号的变动与轿厢位置无关地发生。图32仅示出当轿厢1在某个区间移动时在传感器信号中出现的变动。另外,若仅着眼于特定的轿厢位置,则由滑轮异常引起的传感器信号的变动反复发生。此外,由于槽的磨损是逐渐发展的,因此,由滑轮异常引起的传感器信号的变动随着时间的经过而增大。
[0185]
图33是示出实施方式2的断裂检测装置的例子的图。控制装置13除了具备速度检测部21、位置检测部22以及信号生成部23外,还具备存储部20、提取部24、提取部25、检测部26、判定部27、动作控制部28以及通报部29。本实施方式的断裂检测装置的动作例与图11所示的例子相同。
[0186]
提取部24从传感器信号中提取出特定频带的振动分量(s101)。提取部24的功能与在实施方式1中所公开的功能相同。提取部24例如具备带通滤波器40。带通滤波器40例如被输入来自曳引机11的转矩信号。带通滤波器40从所输入的转矩信号中提取出包含(6)式所示的频率f的特定频带的振动分量。
[0187]
提取部25从由提取部24提取出的振动分量中提取出判定信号(s102)。在本实施方式所示的例子中,提取部25从由提取部24提取出的振动分量中使取决于轿厢1的速度和位置的稳定振动分量和渐增振动分量衰减,由此提取出判定信号。
[0188]
如图18所示,提取部25例如具备低通滤波器42以及减法器43。低通滤波器42被输入带通滤波器40的输出信号y。减法器43被输入带通滤波器40的输出信号y和低通滤波器42的输出信号z。减法器43将带通滤波器40的输出信号y与低通滤波器42的输出信号z的差分信号y
‑
z作为判定信号输出。减法器43的输出信号y
‑
z被输入到检测部26。
[0189]
图34是用于说明提取部24及提取部25的安装例的图。图34a示出曳引机11的转矩。图34a的横轴与图19a所示的例子不同,示出轿厢1的位置。图34a所示的转矩信号被输入到带通滤波器40。图34b示出放大器41的输出信号u2。提取部24对放大器41的输出信号u2如图34c所示那样进行离散化。提取部24将如图34c所示的离散化后的信号作为带通滤波器40的输出信号y输出。
[0190]
如上所述,将轿厢1在行驶时能够实现的速度的区间虚拟地分割为多个速度区间。例如,将上述区间等分为第1速度区间至第n速度区间。在本实施方式所示的例子中,进一步,将轿厢1进行移动的区间虚拟地分割为上下连续的多个位置区间。例如,上述区间被等分为第1位置区间至第m位置区间。
[0191]
图34示出每隔规定的高度设定有位置区间的例子。例如,将轿厢位置0~0.3[m]的
区间设定为第1位置区间。将轿厢位置0.3~0.6[m]的区间设定为第2位置区间。第2位置区间是第1位置区间的正上方的区间。将轿厢位置0.6~0.9[m]的区间设定为第3位置区间。第3位置区间是第2位置区间的正上方的区间。对于比第3位置区间靠上方的区间也同样地设定。包含于第(j 1)位置区间的高度比包含于第j位置区间的高度高。图34示出j的最大值m为6的例子。m的值也可以不为46。
[0192]
在本实施方式所示的例子中,如图34c所示,关于位置区间和速度区间,记作区间(j,i)。例如,区间(11,5)这一记载是指如下区间:轿厢1以包含于第5速度区间的速度在包含于第11位置区间的位置移动。
[0193]
提取部24针对每个位置区间提取出一个信号,由此对连续的输出信号u2进行离散化。例如,提取部24提取在一个位置区间中具有最大值的信号u2作为该位置区间的输出信号y。
[0194]
提取部25具备与位置区间和速度区间的各个组合对应的低通滤波器42。例如,将与第1位置区间对应的低通滤波器42记作滤波器42(1,i)。将与第1速度区间对应的低通滤波器42记作滤波器42(j,1)。将与第2位置区间对应的低通滤波器42记作滤波器42(2,i)。将与第2速度区间对应的低通滤波器42记作滤波器42(j,2)。同样地,将与第m位置区间和第n速度区间对应的低通滤波器42记作滤波器42(j,i)。
[0195]
轿厢1在第1位置区间移动时的带通滤波器40的输出信号y被输入到滤波器42(1,1)至滤波器42(1,n)中的任意一个。例如,如果轿厢1正以包含于第1速度区间的速度移动,则带通滤波器40的输出信号y被输入到滤波器42(1,1)。如果轿厢1正以包含于第5速度区间的速度移动,则带通滤波器40的输出信号y被输入到滤波器42(1,5)。来自滤波器42(1,i)的输出信号z相当于作为第1位置区间且为第i速度区间的区间中的趋势分量。来自滤波器42(1,i)的输出信号z被输入到减法器43。
[0196]
同样地,轿厢1在第j位置区间中移动时的带通滤波器40的输出信号y被输入到滤波器42(j,1)至滤波器42(j,n)中的任意一个。例如,如果轿厢1正以包含于第1速度区间的速度移动,则带通滤波器40的输出信号y被输入到滤波器42(j,1)。如果轿厢1正以包含于第5速度区间的速度移动,则带通滤波器40的输出信号y被输入到滤波器42(j,5)。来自滤波器42(j,i)的输出信号z相当于作为第j位置区间且为第i速度区间的区间中的趋势分量。来自滤波器42(j,i)的输出信号z被输入到减法器43。
[0197]
减法器43将轿厢1以包含于第1速度区间的速度在第1位置区间移动时的带通滤波器40的输出信号y与来自滤波器42(1,1)的输出信号z的差分信号作为区间(1,1)中的判定信号输出。同样地,减法器43将轿厢1以包含于第i速度区间的速度在第j位置区间移动时的带通滤波器40的输出信号y与来自滤波器42(j,i)的输出信号z的差分信号作为区间(j,i)中的判定信号输出。图34c所示的加阴影线部分示出在轿厢1从某个楼层移动至其它楼层时输出判定信号的区间的例子。
[0198]
检测部26根据由提取部25提取出的判定信号,检测传感器信号发生了异常的变动的情况(s103)。检测部26将传感器信号中发生的突发性的变动作为异常的变动检测出来。例如,检测部26在由提取部25提取出的判定信号的值超过阈值th1时,检测出传感器信号发生了异常的变动。当由检测部26检测出传感器信号发生了异常的变动时,将发生该变动时的轿厢位置存储于存储部20中。例如,当检测部26检测出异常的变动时,将用于确定发生了
该变动的位置区间的信息存储于存储部20中。
[0199]
在本实施方式中,也进行与在实施方式1中所公开的s104至s106所示的处理相同的处理。
[0200]
图35是示出被输入到减法器43的信号的例子的图。在图35中,虚线示出放大器41的输出信号u2。即,虚线示出进行离散化之前的输出信号y。白圆圈示出离散化后的输出信号y。实线示出低通滤波器42的输出信号z。在图35中,横轴是轿厢位置。图35示出在轿厢1经过了第j
‑
1位置区间、第j位置区间以及第j 1位置区间时所得到的信号。另外,在与图35相关的说明中,仅考虑位置区间。
[0201]
图35a示出在第j位置区间中存在超过阈值th1的输出信号y(j)的例子。在输出信号y(j)起因于轨道部件45的接缝而产生的情况下,第j位置区间的输出信号z(j)追随输出信号y(j)。输出信号z(j)的值变为与输出信号y(j)的值相同的值。因此,作为第j速度区间的判定信号的输出信号y(j)
‑
z(j)变为小于阈值th1的值。在图35a所示的例子中,在第j
‑
1位置区间、第j位置区间以及第j 1位置区间的各个位置区间中,检测部26未检测到传感器信号发生了异常的变动的情况。
[0202]
图35b示出在刚取得了图35a所示的信号之后,轿厢1再次经过第j
‑
1位置区间、第j位置区间以及第j 1位置区间时的信号。在图35b所示的例子中,在第j
‑
1位置区间中存在超过阈值th1的输出信号y(j
‑
1)。图35b所示的输出信号y(j
‑
1)是图35a所示的输出信号y(j)偏移到第j
‑
1速度区间中的信号。这样的现象例如是由于主绳索4的伸长而发生的。
[0203]
在图35b所示的例子中,第j
‑
1位置区间的输出信号z(j
‑
1)不追随输出信号y(j
‑
1)的急剧变化。因此,如果作为第j
‑
1位置区间的判定信号的输出信号y(j
‑
1)
‑
z(j
‑
1)大于阈值th1,则存在由断裂判定功能27
‑
2判定为存在断裂部4c的可能性。
[0204]
另一方面,在第j位置区间中,输出信号y(j)急剧变小。输出信号z(j)不追随输出信号y(j)的急剧变化。因此,作为第j位置区间的判定信号的输出信号y(j)
‑
z(j)成为负值。在第j位置区间中,等效地阈值th1升高,检测灵敏度降低。
[0205]
上述是对位置区间进行说明,但关于速度区间也可能会发生相同的现象。以下,对用于防止这样的误检测的功能进行说明。具备本功能的控制装置13的例子与图33所示的例子相同。控制装置13也可以还具备运算部30。
[0206]
图36是用于说明提取部25的功能的一例的图。提取部25针对低通滤波器42的输出信号z,在也考虑到相邻的位置区间的值和相邻的速度区间的值的基础上,输出信号y
‑
z作为判定信号。例如,提取部25如下所述地输出判定信号。
[0207][0208][0209]
si(k)是第k位置区间中的判定信号。x是轿厢位置。bpf(x)是带通滤波器40的输出。v(x)是轿厢1的速度。tf(k,l)是第k位置区间以及第l速度区间中的趋势分量。δp是分割而成的位置区间的长度。δv是分割而成的速度区间的长度。
[0210]
例如,考虑轿厢1以如图36所示的行驶模式进行了移动的例子。在图36所示的例子中,轿厢1经过第7位置区间时的速度包含于第4速度区间以及第5速度区间。关于位置区间,
由于第7位置区间是经过区间,因此,提取部25针对输出信号z不仅考虑第7位置区间的值,还考虑第6位置区间的值和第8位置区间的值。关于速度区间,由于第4速度区间以及第5速度区间是经过区间,因此,提取部25针对输出信号z不仅考虑第4速度区间的值以及第5速度区间的值,还考虑第3速度区间的值和第6速度区间的值。即,提取部25采用作为第6位置区间至第8位置区间中的任意区间的值、且为第3速度区间至第6速度区间中的任意区间的值的值中最大的值作为要从带通滤波器40的输出信号y的值中减去的值。
[0211]
作为另一例,提取部25也可以在考虑相邻的位置区间的值和相邻的速度区间的值时,仅考虑轿厢1的实施经过区间。即,在图36所示的例子中,轿厢1经过第6位置区间时的速度包含于第3速度区间以及第4速度区间。轿厢1经过第7位置区间时的速度包含于第4速度区间以及第5速度区间。轿厢1经过第8位置区间时的速度包含于第5速度区间以及第6速度区间。提取部25也可以在轿厢1经过了第7位置区间时,采用图36的标有白星号的区间的值中最大的值作为要从带通滤波器40的输出信号y的值中减去的值。
[0212]
同样地,在图36所示的例子中,轿厢1经过第17位置区间时的速度是包含于第6速度区间的速度。关于位置区间,由于第17位置区间是经过区间,因此提取部25针对输出信号z不仅考虑第17位置区间的值,还考虑第16位置区间的值和第18位置区间的值。关于速度区间,由于第6速度区间是经过区间,因此提取部25针对输出信号z不仅考虑第6速度区间的值,还考虑第5速度区间的值。即,提取部25采用作为第16位置区间至第18位置区间中的任意区间的值、且为第5速度区间至第6速度区间中的任意区间的值的值中最大的值作为要从带通滤波器40的输出信号y的值中减去的值。
[0213]
作为另一例,提取部25也可以在考虑相邻的位置区间的值和相邻的速度区间的值时,仅考虑轿厢1的实施经过区间。即,在图36所示的例子中,轿厢1经过第16位置区间时的速度包含于第6速度区间。轿厢1经过第17位置区间时的速度包含于第6速度区间。轿厢1经过第18位置区间时的速度包含于第6速度区间。提取部25也可以在轿厢1经过了第17位置区间时,采用图36的标有黑星号的区间的值中最大的值作为要从带通滤波器40的输出信号y的值中减去的值。
[0214]
图37是示出实施方式2的断裂检测装置的另一例的图。图37所示的例子与图33所示的例子的不同点在于,提取部25具备衰减功能31、衰减功能32以及提取功能33。
[0215]
例如,提取部24从传感器信号中提取特定频带的振动分量(s101)。在提取部24具备带通滤波器40的情况下,带通滤波器40从所输入的转矩信号中提取包含(6)式所示的频率f的特定频带的振动分量。
[0216]
在图37所示的例子中,衰减功能31具有如下功能:从由提取部24提取出的振动分量中使取决于轿厢1的速度的稳定振动分量和渐增振动分量衰减。衰减功能32具有如下功能:从由提取部24提取出的振动分量中使取决于轿厢1的位置的稳定振动分量和渐增振动分量衰减。提取功能33选择衰减功能31进行的衰减或衰减功能32进行的衰减中的一方。例如,提取功能33根据轿厢1的速度和轿厢1的位置进行上述选择。提取功能33如果选择衰减功能31进行的衰减,则使用衰减功能31提取判定信号。提取功能33如果选择衰减功能32进行的衰减,则使用衰减功能32提取判定信号(s102)。
[0217]
图38是示出提取部25的一例的图。如图38所示,提取部25例如具备低通滤波器42v、低通滤波器42p以及减法器43。低通滤波器42v实现衰减功能31的功能。低通滤波器42p
实现衰减功能32的功能。减法器43实现提取功能33的一部分功能。
[0218]
低通滤波器42v被输入带通滤波器40的输出信号y。低通滤波器42p被输入带通滤波器40的输出信号y。减法器43被输入带通滤波器40的输出信号y。减法器43还被输入低通滤波器42v的输出信号z或低通滤波器42p的输出信号z。减法器43将输出信号y与输出信号z的差分信号y
‑
z作为判定信号输出。减法器43的输出信号y
‑
z被输入到检测部26。
[0219]
与低通滤波器42v相关的安装例与图19所示的例子相同。例如,将轿厢1在行驶时能够实现的速度的区间虚拟地分割为多个速度区间。提取部25具备与速度区间各自对应的低通滤波器42v。将与第i速度区间对应的低通滤波器42v记作滤波器42v
‑
i。滤波器42v
‑
i被输入轿厢1以包含于第i速度区间的速度进行移动时的带通滤波器40的输出信号y。来自滤波器42v
‑
i的输出信号z相当于第i速度区间中的趋势分量。
[0220]
图39是示出与低通滤波器42p相关的安装例的图。图39a示出曳引机11的转矩。图39a的横轴示出轿厢1的位置。例如,图39a所示的转矩信号被输入到带通滤波器40。图39b示出放大器41的输出信号u2。提取部24对放大器41的输出信号u2如图39c所示那样进行离散化。提取部24将如图39c所示的离散化后的信号作为带通滤波器40的输出信号y输出。
[0221]
例如,将轿厢1能够移动的区间虚拟地分割为上下连续的多个位置区间。例如,上述区间被等分为第1位置区间至第m位置区间。在图39中,为了简化记载,将第j位置区间记作区间j。图39示出j的最大值m为25的例子。
[0222]
提取部25具备与位置区间各自对应的低通滤波器42p。将与第j位置区间对应的低通滤波器42p记作滤波器42p
‑
j。滤波器42p
‑
1被输入轿厢1在第1位置区间移动时的带通滤波器40的输出信号y。来自滤波器42p
‑
1的输出信号z相当于第1位置区间中的趋势分量。滤波器42p
‑
j被输入轿厢1在第j位置区间移动时的带通滤波器40的输出信号y。来自滤波器42p
‑
j的输出信号z相当于第j位置区间中的趋势分量。
[0223]
提取功能33比较根据轿厢1的速度而决定的低通滤波器42v的输出信号zv的值和根据轿厢1的位置而决定的低通滤波器42p的输出信号zp的值。例如,提取功能33将输出信号zv的值和输出信号zp的值中较大的值作为输出信号z输出至减法器43。例如,如果轿厢1以包含于第i速度区间的速度在第j位置区间移动,则提取功能33比较从滤波器42v
‑
i输出的信号的值和从滤波器42p
‑
j输出的信号的值,将较大的一方作为输出信号z输出。
[0224]
图40是用于说明提取功能33的另一例的图。图40示出提取功能33在也考虑到相邻的位置区间的值和相邻的速度区间的值的基础上进行输出信号z的而决定的例子。例如,如图40的星号所示,考虑轿厢1以包含于第4速度区间的速度在第3位置区间移动的例子。在这样的情况下,提取功能33不仅考虑第4速度区间的值,还考虑第3速度区间的值以及第5速度区间的值。此外,提取功能33不仅考虑第3位置区间的值,还考虑第2位置区间的值以及第4位置区间的值。即,提取功能33将第3速度区间的值、第4速度区间的值、第5速度区间的值、第2位置区间的值、第3位置区间的值以及第4位置区间的值中最大的值作为输出信号z输出。
[0225]
作为另一例,提取功能33也可以在轿厢1加速时以及减速时,将根据轿厢1的速度而决定的低通滤波器42v的输出信号zv作为输出信号z输出。在这样的情况下,提取功能33在轿厢1恒速时,将根据轿厢1的位置而决定的低通滤波器42p的输出信号zp作为输出信号z输出。
versatile disk:数字多功能盘)。可采用的半导体存储器包含ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、闪存、eprom(erasable programmable read only memory:可擦可编程只读存储器)以及eeprom(electrically erasable programmable read only memory:电可擦可编程只读存储器)等。
[0238]
图44是示出控制装置13的硬件资源的另一例的图。在图44所示的例子中,控制装置13例如具备包含处理器51、存储器52以及专用硬件53的处理电路50。图44示出通过专用硬件53实现控制装置13所具有的功能的一部分的例子。也可以通过专用硬件53实现控制装置13所具有的功能的全部。作为专用硬件53,能够采用单一电路、复合电路、编程处理器、并行编程处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field programmable gate array:现场可编程门阵列)或它们的组合。
[0239]
也可以将控制装置13所具有的功能安装于通过网络与电梯装置的控制设备连接的云上的计算机。
[0240]
产业上的可利用性
[0241]
本发明的断裂检测装置能够用于检测在绳索产生的断裂部。
[0242]
标号说明
[0243]
1:轿厢;2:对重;3:井道;4:主绳索;4a:端部;4b:端部;4c:断裂部;5:吊轮;6:吊轮;7:反绳轮;7a:轴;8:驱动绳轮;9:反绳轮;10:吊轮;11:曳引机;12:称量装置;13:控制装置;14:编码器;15:限速器;16:限速绳索;17:限速绳轮;18:编码器;19:防脱部件;19a:对置部;19b:对置部;20:存储部;21:速度检测部;22:位置检测部;23:信号生成部;24:提取部;25:提取部;26:检测部;27:判定部;28:动作控制部;29:通报部;30:运算部;31:衰减功能;32:衰减功能;33:提取功能;40:带通滤波器;41:放大器;42:低通滤波器;43:减法器;44:高通滤波器;45:轨道部件;46:陷波滤波器;47:高通滤波器;48:低通滤波器;50:处理电路;51:处理器;52:存储器;53:专用硬件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。