1.本发明涉及一种用于将容器保持在容器处理设备中、例如用于将饮料容器保持在饮料灌装设施的容器处理设备中的夹紧设备,以及一种用于将容器保持在容器处理设备中的夹紧设备的夹紧臂的夹爪,和一种容器处理设备。
背景技术:
2.已知的是,在饮料灌装设施中将其中的要处理的容器借助于夹紧设备运输通过容器处理设备的各个处理站。这种夹紧设备具有两个相对于彼此可运动的夹紧臂,所述夹紧臂能够在打开位置和关闭位置之间运动,在所述打开位置中,要保持的容器能够定位在夹紧臂之间,在所述关闭位置中,在夹紧臂之间定位的容器能够通过夹紧臂保持。
3.为了保持容器,每个夹紧臂具有保持部段,借助所述保持部段,夹紧臂与容器接触,以便保持后者。由于与保持的容器的持久接触,保持部段经受逐渐磨损。为了预估所述磨损以及为了实现不同的容器类型能够通过同一夹紧设备保持和运输,已知的是,在夹紧臂处设有可更换的夹爪,所述夹爪分别配设有属于相应的夹紧臂的保持部段,如例如从de 10 2007 048 861 a1中得出的。
4.因此,在将一种容器类型的处理变换成另一种容器类型时,在夹紧设备中仅应执行夹爪的更换。夹紧设备的其余部分、尤其夹紧臂能够持久地保持在处理设备,例如其夹紧承载件上。
5.为了将夹爪固定在夹紧臂上已知的是,夹紧臂具有用于将夹爪锁止在夹紧臂上的锁止单元,如例如从dd 226 826 a1中得出的。从所述已知的设计方案中得出夹紧臂的高的生产耗费,因为锁止单元必须安装和固定、例如拧紧或焊接到夹紧臂上。通过将锁紧单元设置在夹紧臂上,一方面其复杂性提高。另一方面设有锁止单元的夹紧臂由于锁止单元而需要耗费地清洁,并且此外在故障情况下可能糟糕地更换,尤其当提出,夹紧臂固定地保留在处理设备的夹紧承载件上时如此,如这例如在用于冲洗容器的设备、所谓的“冲洗器”中是这种情况。
技术实现要素:
6.基于已知的现有技术,本发明的目的是,提供一种用于将容器保持在容器处理设备中、尤其用于将饮料容器保持在饮料灌装设施的容器处理设备中的改进的夹紧设备。
7.所述目的通过用于将容器保持在容器处理设备中、优选用于将饮料容器保持在饮料灌装设施的容器处理设备中的夹紧设备。有利的改进方案在说明书和附图中得出。
8.对应地,提出一种用于将容器保持在容器处理设备中、优选用于将饮料容器保持在饮料灌装设施的容器处理设备中的夹紧设备,包括两个相对于彼此可运动的夹紧臂,其中至少一个夹紧臂具有可更换的夹爪,所述夹爪具有用于保持要保持的容器的保持部段。夹紧设备的特征在于,夹爪具有止动元件,用于实现与在相关的夹紧臂中构成的留空部的形状配合。
9.通过夹爪具有止动元件,用于实现与在相关的夹紧臂中构成的留空部的形状配合,不再需要的是,夹紧臂设有用于将可更换的夹爪固定在夹紧臂上的适合的锁止单元。对应地,夹紧臂能够具有更简单的构造。同样地,由此能够实现夹紧臂和同样夹紧设备的更简单的生产,因为例如能够取消焊接和随后的酸洗和/或电抛光。
10.此外,夹爪的更换与常规的夹紧设备相比能够简化。为了更换夹爪,服务技术人员必须抓握夹爪。对此,所述服务技术人员直接靠近夹爪。因为夹爪具有止动元件,服务技术人员不必抓握夹紧设备的其他部位,以便松开相对于夹紧臂的锁止,而是仅必须抓握止动元件,从而抓握夹爪,这是无论如何需要的。借此,夹爪的更换或拆卸以及安装例如也能够借助仅一只手进行,使得能够实现明显更简单地且同时也更安全地处理夹爪。
11.根据另一优选的实施方式,止动元件包括可弹性变形的区域,优选悬臂。在此尤其已经证实为有利的是,止动元件在卡接钩的意义上构成。
12.如果止动元件包括用于松开形状配合的相互作用区段,那么通过操作交互元件能够以简单的方式实现松开夹爪在夹紧臂上的锁止,从而将夹爪从夹紧臂拆卸。
13.为了简化将夹爪推动到夹紧臂上,止动元件能够包括朝向推动方向倾斜的倒棱部段,沿所述推动方向,夹爪能够推动到相关的夹紧臂上。
14.根据另一优选的实施方式,夹爪具有沿推动方向延伸的、用于容纳相关的夹爪的插接区域的容纳部,沿所述推动方向,夹爪能够推动到相关的夹紧臂上。通过容纳部,能够实现夹爪相对于夹紧臂的垂直于推动方向的定位。
15.优选地,夹爪具有至少一个垂直于推动方向从容纳部的内壁延伸的夹紧突出部。夹紧突出部在此优选地构成为,使得在夹紧突出部和容纳部的相对置的内壁之间存在的间距以预设的值、例如以0.9至0.99的缩放倍数小于夹紧臂或插接区域沿上述间距的方向的宽度。由此,预定的夹紧力能够由夹爪施加到夹紧臂的插接区域上,使得夹爪位置稳定地定位在夹紧臂上。已经证实为尤其有利的是,在容纳部中设有至少两个夹紧突出部。优选地,两个夹紧突出部彼此相对置和/或至少两个夹紧突出部以90
°
彼此取向。
16.已经证实为尤其有利的是,夹爪一件式地构成,优选构成为3d打印件。尤其在此,止动元件与其余的夹爪一件式地成型。
17.根据另一优选的实施方式,至少一个夹紧臂、优选至少设有夹爪的夹紧臂构成为注塑件。
18.替选地或附加地,至少一个夹紧臂、优选至少设有夹爪的夹紧臂由切出的成型板构成,其中成型板优选地由从平坦的板中切出的坯件成型,其中坯件优选地借助于弯曲、深冲、冷成型和/或热成型来成型。
19.优选地,坯件借助于水束切割、冲制、激光切割或锯切从平坦的板中切割。
20.根据另一优选的实施方式,夹紧臂、优选设有夹爪的夹紧臂至少包括热塑性塑料或金属或者金属合金。上述材料特别适合于之前描述的生产方法。
21.已经证实为有利的是,夹爪包括塑料,其中所述夹爪优选由塑料构成。
22.替选地,夹爪也能够包括金属或金属合金,其中所述夹爪优选地由金属或金属合金构成。
23.根据另一优选的实施方式,两个夹紧臂分别具有夹爪,所述夹爪具有止动元件,用于实现与在相关的夹紧臂中构成的留空部的形状配合。
24.上述目的此外通过一种容器处理设备来实现。有利的改进方案在本说明书和附图中得出。
25.对应地,提出一种容器处理设备,包括用于处理容器的处理单元和夹紧承载件。在夹紧承载件上,至少一个根据上述实施方式之一的夹紧设备安置在夹紧承载件上。
26.将至少一个根据上述实施方式之一的夹紧设备安置在夹紧承载件上,通过这种方式,关于夹紧设备描述的优点和效果能够以类似的方式通过容器处理设备实现。优选地,处理单元包括用于冲洗容器的冲洗单元。换言之,容器处理设备优选为冲洗器。
27.上述目的此外通过一种可更换的夹爪来实现。有利的改进方案在说明书和附图中得出。
28.通过夹爪,关于夹紧设备描述的优点和效果能够以类似的方式实现。
29.夹爪的关于夹紧设备描述的实施方式也适用于夹爪本身。
30.对应地,提出一种用于将容器保持在容器处理设备中的夹紧设备的、优选将饮料容器保持在饮料灌装设施中的夹紧设备的夹紧臂的可更换的夹爪,包括用于保持要保持的容器的保持部段。夹爪此外具有用于实现与在夹爪中构成的留空部的形状配合的止动元件。
附图说明
31.本发明的其他优选的实施方式通过下面对附图的描述详细阐述。在此示出:
32.图1示意地示出用于保持容器的夹紧设备的立体侧视图;
33.图2示意地示出图1中的夹紧设备的另一立体侧视图;
34.图3示意地示出贯穿图1和2的夹紧设备的夹紧臂的剖面图;
35.图4示意地示出图1至3的夹紧设备的夹爪的立体侧视图;
36.图5示意地示出图1至3的夹紧设备的另一夹爪的立体侧视图;
37.图6示意地示出图5中的夹爪的侧视图;
38.图7示意地示出用于制造根据图1至3的夹紧设备的夹紧臂的坯件的俯视图;
39.图8示意地示出由根据图7的坯件生产的夹紧臂的立体侧视图;和
40.图9示意地示出容器处理设备的俯视图。
具体实施方式
41.下面根据附图描述优选的实施例。在此,相同的、相似的或起相同作用的元件在不同的图中设有相同的附图标记,并且部分地放弃对所述元件的重复描述,以便避免冗余。
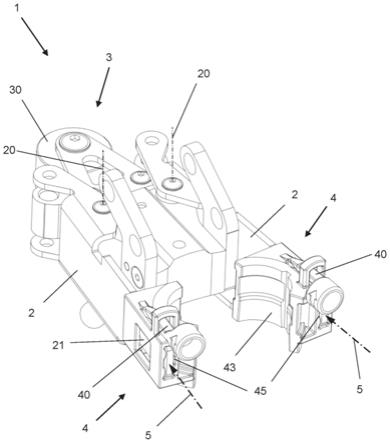
42.在图1中示意地示出用于保持容器的夹紧设备1的立体侧视图。夹紧设备1包括两个相对于彼此可运动的夹紧臂2,所述夹紧臂分别在中央设置的夹紧臂承载件3上经由相应的枢转轴线2可枢转地设置。通过操作夹紧臂承载件3的操作元件30,夹紧臂2能够在打开位置和闭合位置之间枢转。
43.两个夹紧臂2中的每个夹紧臂具有可更换的夹爪4,所述夹爪分别具有用于保持要保持的容器的保持部段43。夹爪4推动到夹紧臂2上,其方式为:夹爪4沿推动方向5插接到相关的夹紧臂2的插接区域21上,或者插接区域21沿推动方向5推入到设置在夹爪4上的容纳部45中。
44.夹爪4分别具有止动元件40,用于实现沿推动方向5与在相应的夹紧臂2中构成的留空部的形状配合(参见图2和3)。
45.图2示意地示出图1中的夹紧设备1的另一立体侧视图,其中夹爪4从夹紧臂2取下。由此在夹紧臂2中分别可见设置在插接区域21中的留空部23。此外可见止挡件22,所述止挡件对夹爪4沿推动方向5到夹紧臂2上的推动限界。
46.从图3中示意地得出贯穿图1和2的夹紧设备1的夹紧臂2的侧视图。止动元件40包括从夹爪4的基本体延伸的悬臂42,所述悬臂为可弹性变形的区域41。止动元件40还包括相互作用区段48,通过所述相互作用区段的操作,悬臂42能够沿垂直于推动方向5设置的打开方向6提升,使得止动元件40与留空部23脱离接合从而能够将夹爪4从夹紧臂2取下。
47.如参考图6进一步阐述的,夹爪4的容纳部45构成为,使得夹爪4在插接区域21上防扭转地并且基本上无间隙地朝向推动方向5的方向引导。如已经在上文中提到的,止挡件22对夹爪4的推动限界。
48.为了简化夹爪4到插接区域21上的推动,止动元件40具有朝向推动方向5倾斜的倒棱部段44。
49.在图4和5中示出图1至3中的夹紧设备1的两个夹紧臂2的夹爪4的立体侧视图。夹爪4关于夹紧设备的中轴线镜像对称地构成并且为右边的和左边的夹爪4。
50.图6示意地示出图5中的夹爪4的侧视图,所述侧视图对应于沿推动方向5的视图。从所述视图中清楚可见的是,容纳部45包括从容纳部45的内壁垂直于推动方向5延伸的夹紧突出部47、47’。在此,一对夹紧突出部47、47’分别相对置。夹紧突出部47对容纳部的宽度限界,而夹紧突出部47’对容纳部的高度限界。
51.借助于附图标记26表明插接区域21的横截面轮廓。横截面轮廓26具有宽度和高度,所述宽度和高度分别略微大于容纳部45的通过夹紧突出部47、47’预设的宽度和高度。当前,容纳部45的宽度和高度以0.98的缩放倍数小于插接区域21的宽度和高度。由此,由夹爪4将预定的夹紧力施加到夹紧臂2的插接区域21上,使得夹爪4位置稳定地在夹紧臂2上定位,所述夹紧力从夹爪4的材料的刚性以及插接区域21的材料的刚性和通过上述缩放存在的在高度和宽度中的差得出。
52.在此,夹爪4由热塑性塑料构成为3d打印件。
53.图7示意地示出用于制造根据图1至3的夹紧设备1的夹紧臂2的坯件24的俯视图。坯件24由钢合金制成的平坦的板借助于激光切割取下或切出。
54.在此,连同留空部23和止挡件22一起的整个插接区域21已经在预设的公差范围之内切割到其最终度量,如夹紧臂2在装入夹紧设备1的状态中具有的最终度量那样,使得插接区域21除了将切割棱边去毛刺的可选的步骤、例如喷砂之外不允许其他处理。
55.夹紧臂2的如在图8中示出的最终形状通过对坯件24的成型获得,所述成型当前通过两个弯曲区域27分别围绕弯曲棱边25的弯曲进行。
56.尤其,如果夹紧臂2由热塑性塑料构成,那么成型也能够在深冲的范围中进行,其中坯件24至少在弯曲棱边26的区域中变热,使得在成型弯曲区域27之前,热变形是可行的。
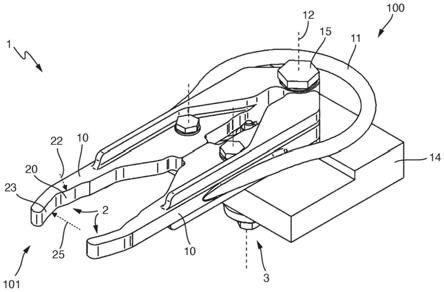
57.图9示意地示出容器处理设备8的俯视图,包括用于处理通过容器处理设备8运输的容器9的处理单元82。为了通过容器处理设备8运输容器9,所述容器处理设备具有沿运输方向84可运动的夹紧承载件80,在所述夹紧承载件上安置有多个根据在图1至8中描述的实
施方式的夹紧设备1。
58.处理单元82当前构成为用于冲洗容器9的冲洗单元。因此,容器处理设备8为冲洗器。
59.只要可用,在实施例中示出的全部单独特征能够彼此组合和/或互换,而不脱离本发明的范围。
60.附图标记列表:
[0061]1ꢀꢀꢀꢀꢀꢀꢀ
夹紧设备
[0062]2ꢀꢀꢀꢀꢀꢀꢀ
夹紧臂
[0063]
20
ꢀꢀꢀꢀꢀꢀ
枢转轴线
[0064]
21
ꢀꢀꢀꢀꢀꢀ
插接区域
[0065]
22
ꢀꢀꢀꢀꢀꢀ
止挡件
[0066]
23
ꢀꢀꢀꢀꢀꢀ
留空部
[0067]
24
ꢀꢀꢀꢀꢀꢀ
坯件
[0068]
25
ꢀꢀꢀꢀꢀꢀ
弯曲棱边
[0069]
26
ꢀꢀꢀꢀꢀꢀ
横截面轮廓
[0070]
27
ꢀꢀꢀꢀꢀꢀ
弯曲区域
[0071]3ꢀꢀꢀꢀꢀꢀꢀ
夹紧臂承载件
[0072]
30
ꢀꢀꢀꢀꢀꢀ
操作元件
[0073]4ꢀꢀꢀꢀꢀꢀꢀ
夹爪
[0074]
40
ꢀꢀꢀꢀꢀꢀ
止动元件
[0075]
41
ꢀꢀꢀꢀꢀꢀ
可弹性变形的区域
[0076]
42
ꢀꢀꢀꢀꢀꢀ
悬臂
[0077]
43
ꢀꢀꢀꢀꢀꢀ
保持部段
[0078]
44
ꢀꢀꢀꢀꢀꢀ
倒棱部段
[0079]
45
ꢀꢀꢀꢀꢀꢀ
容纳部
[0080]
46
ꢀꢀꢀꢀꢀꢀ
内壁
[0081]
47,47
’ꢀ
夹紧突出部
[0082]
48
ꢀꢀꢀꢀꢀꢀ
相互作用元件
[0083]5ꢀꢀꢀꢀꢀꢀꢀ
推动方向
[0084]6ꢀꢀꢀꢀꢀꢀꢀ
打开方向
[0085]8ꢀꢀꢀꢀꢀꢀꢀ
容器处理设备
[0086]
80
ꢀꢀꢀꢀꢀꢀ
夹紧承载件
[0087]
82
ꢀꢀꢀꢀꢀꢀ
处理单元
[0088]
84
ꢀꢀꢀꢀꢀꢀ
运输方向
[0089]9ꢀꢀꢀꢀꢀꢀꢀ
容器
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。