技术特征:
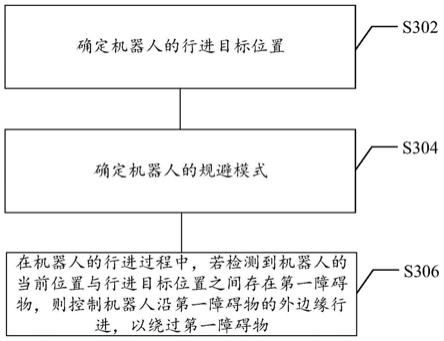
1.一种机器人避障方法,其特征在于,包括:确定所述机器人的行进目标位置;确定所述机器人的规避模式;在所述机器人的行进过程中,若检测到所述机器人的当前位置与所述行进目标位置之间存在第一障碍物,则控制所述机器人沿所述第一障碍物的外边缘行进,以绕过所述第一障碍物;其中,所述第一障碍物的高度小于所述机器人的测量高度范围。2.根据权利要求1所述的机器人避障方法,其特征在于,控制所述机器人沿所述第一障碍物的外边缘行进包括:检测所述机器人与所述第一障碍物之间的距离;在所述距离小于距离阈值的情况下,则控制所述机器人沿所述第一障碍物的外边缘行进。3.根据权利要求2所述的机器人避障方法,其特征在于,在所述距离小于距离阈值的情况下,控制所述机器人沿所述第一障碍物的外边缘继续行进包括:在所述距离小于距离阈值的情况下,控制所述机器人偏转预设角度,并向远离所述第一障碍物的方向前进;若前进后所述机器人的当前位置与所述第一障碍物之间的距离大于所述距离阈值,则控制所述机器人反向偏转所述预设角度,并向靠近所述第一障碍物的方向行进。4.根据权利要求1至3任一项所述的机器人避障方法,其特征在于,所述机器人避障方法还包括:在沿所述第一障碍物的外边缘行进过程中,每间隔预设时长,检测所述机器人的当前位置与所述行进目标位置之间是否存在所述第一障碍物。5.根据权利要求4所述的机器人避障方法,其特征在于,所述机器人避障方法还包括:若检测到所述机器人与所述行进目标位置之间不存在所述第一障碍物,则控制所述机器人按照目标行进路径继续行进,以到达所述目标行进位置;其中,所述目标行进路径为所述机器人与所述行进目标位置之间的直线或近似直线路径。6.根据权利要求1至3任一项所述的机器人避障方法,其特征在于,所述机器人避障方法还包括:在沿所述第一障碍物的外边缘行进过程中,若所述机器人的当前行进方向上存在第二障碍物,则确定所述当前行进方向的反方向;基于所述反方向,控制所述机器人沿所述第一障碍物的外边缘行进,以绕过所述第一障碍物;其中,所述第二障碍物位于所述第一障碍物的外边缘,且阻碍所述机器人继续行进;和/或,在所述机器人绕所述第一障碍物的外边缘行进一周后,若检测到所述机器人的当前位置与所述行进目标位置之间存在第一障碍物,则控制所述机器人结束行进,并发出警告信息。7.一种机器人避障装置,其特征在于,包括:位置确定模块,用于确定所述机器人的行进目标位置;
模式选择模块,用于确定所述机器人的规避模式;行进控制模块,用于在所述机器人在行进过程中,若所述机器人的当前位置与所述行进目标位置之间存在第一障碍物,则控制所述机器人沿所述第一障碍物的外边缘行进,以绕过所述第一障碍物;其中,所述第一障碍物的高度小于所述机器人的测量高度范围。8.一种机器人,其特征在于,包括:障碍物检测装置,用于检测所述机器人的当前位置与所述机器人的行进目标位置之间是否存在第一障碍物,其中,所述第一障碍物的高度小于所述机器人的测量高度范围;机器人避障装置,用于确定所述机器人的行进目标位置,确定所述机器人的规避模式,若检测到所述机器人的当前位置与所述行进目标位置之间存在第一障碍物,则控制所述机器人沿所述第一障碍物的外边缘行进,以绕过所述第一障碍物。9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1至6中任一项所述的机器人避障方法。10.一种电子设备,其特征在于,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如权利要求1至6中任一项所述的机器人避障方法。
技术总结
本公开提供了一种机器人避障方法、机器人避障装置、机器人、计算机可读存储介质和电子设备,涉及机器人控制技术领域。该机器人避障方法包括:确定机器人的行进目标位置;确定所述机器人的规避模式;在机器人的行进过程中,若检测到机器人的当前位置与行进目标位置之间存在第一障碍物,则控制机器人沿第一障碍物的外边缘行进,以绕过第一障碍物;其中,第一障碍物的高度小于机器人的测量高度范围。本公开可以提高机器人的运行效率,增加机器人工作的连续性。连续性。连续性。
技术研发人员:张磊 关鑫
受保护的技术使用者:北京石头世纪科技股份有限公司
技术研发日:2021.04.15
技术公布日:2021/11/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。