1.本发明涉及自移动设备与充电站对接方法、装置、自移动设备及可读存储介质,尤其涉及一种提高回归效率的自移动设备与充电站对接方法、装置、自移动设备及可读存储介质。
背景技术:
2.随着科技的发展,室外机器人的应用越来越广泛。如智能割草机可以自动地帮助人们维护草坪,将人们从草坪维护的枯燥且费时费力的家务工作中解放出来,因此受到极大欢迎。室外机器人执行功能任务过程中,无需用户的操作,这就要求室外机器人有很好地定位功能,使其能够在工作区域内自移动。
3.为实现智能割草机准确到达充电站,传统的方法为在草地的四周布设边界线,边界线可为对外发射电磁信号的磁引导线,智能割草机的电磁信号传感器通过感应的电磁信号强度,使边界线纵向地位于智能割草机的中心位置,从而使智能割草机沿所布设的边界线移动至充电站。该方法中,智能割草机按照随机方向寻找边界线,寻找边界线占用的时间较长,不利于提高回归效率。
技术实现要素:
4.本发明提供一种可提高回归效率的自移动设备与充电站对接方法、装置、自移动设备及可读存储介质。
5.本发明提供一种自移动设备与充电站对接方法,所述充电站与边界线相连,所述方法包括以下步骤:
6.控制所述自移动设备从当前位置靠近对接边界移动;
7.在移动过程中判断所述自移动设备是否感应到边界线信号;
8.如果所述自移动设备在到达所述对接边界前或到达所述对接边界时感应到所述边界线信号,则通过所述边界线信号控制所述自移动设备朝所述充电站移动直至对接成功;
9.如果所述自移动设备在到达所述对接边界时仍未感应到所述边界线信号,则控制所述自移动设备从所述对接边界朝所述边界线移动直至感应到所述边界线信号。
10.可选地,所述控制所述自移动设备从所述对接边界朝所述边界线移动直至感应到所述边界线信号,包括:
11.控制所述自移动设备在所述对接边界沿着对接边界绕圈移动直至感应到边界线信号。
12.可选地,所述控制所述自移动设备从所述对接边界朝所述边界线移动直至感应到所述边界线信号,包括:
13.控制所述自移动设备在所述对接边界旋转预设角度并继续行走直至感应到边界
线信号。
14.可选地,所述控制所述自移动设备从当前位置靠近对接边界移动,包括:
15.通过无线电探测装置控制所述自移动设备从当前位置靠近对接边界移动,所述无线电探测装置包括定位基站与定位标签,所述定位基站设于充电站的预设距离内,所述定位标签设于自移动设备上,根据定位标签与定位基站之间的距离控制所述自移动设备从当前位置靠近对接边界移动。
16.可选地,所述对接边界是以所述定位基站为圆心的对接圆,所述对接圆的半径为d
dst
,且至少部分所述边界线与所述定位基站的距离不小于d
dst
。
17.可选地,所述控制所述自移动设备从当前位置靠近对接边界移动,包括:
18.控制所述自移动设备从当前位置沿当前方向前进,并判断所述自移动设备是否感应到边界线信号,并在所述自移动设备未感应到边界线信号时,判断所述自移动设备是否到达对接边界;
19.其中,
20.如果自移动设备未到达对接边界,则判断所述自移动设备与所述定位基站的距离是否缩小,其中,如果所述自移动设备与所述定位基站的距离在缩小,则控制所述自移动设备从当前位置沿当前方向前进,并判断所述自移动设备是否感应到边界线信号;如果所述自移动设备与所述定位基站的距离不在缩小,则控制所述自移动设备沿第一旋转方向旋转第一预定旋转角度,再控制所述自移动设备从当前位置沿当前方向前进,并判断所述自移动设备是否感应到边界线信号;
21.如果自移动设备已到达对接边界,则控制所述自移动设备从所述对接边界朝所述边界线移动直至感应到所述边界线信号。
22.可选地,所述控制所述自移动设备从当前位置靠近对接边界移动,包括:
23.通过视觉系统控制所述自移动设备从当前位置靠近对接边界移动,所述视觉系统包括设于自移动设备的摄像头及设于充电站的以接标识。
24.本发明还提供一种自移动设备与充电站对接装置,所述装置包括:
25.边界线寻找模块,用于控制所述自移动设备从当前位置靠近对接边界移动;并用于判断自移动设备是否感应到边界线信号;
26.对接控制模块,用于控制所述自移动设备从所述对接边界朝所述边界线移动直至感应到所述边界线信号;并用于通过所述边界线信号控制所述自移动设备朝所述充电站移动直至对接成功。
27.本发明还提供一种自移动设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述自移动设备与充电站对接方法的步骤。
28.本发明还提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述自移动设备与充电站对接方法的步骤。
29.相较于现有技术,本发明设置对接边界,控制自动移动设备靠近对接边界移动以寻找边界线,可减少自动移动设备寻找边界线的时间,从而提高了自动移动设备的回归效率。
附图说明
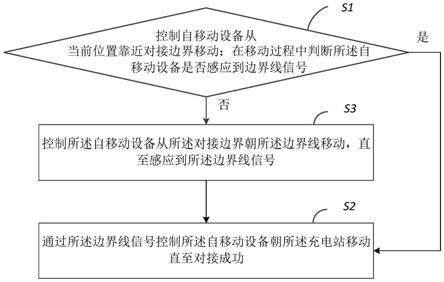
30.图1为本发明自移动设备与充电站对接方法的第一实施例的流程图;
31.图2为本发明自移动设备与充电站对接方法在第一使用环境中的回归示意图;
32.图3为本发明自移动设备与充电站对接方法在第二使用环境中的回归示意图;
33.图4为图1中步骤s1的第一实施例的具体流程图;
34.图5为图1中步骤s1的第二实施例的具体流程图;
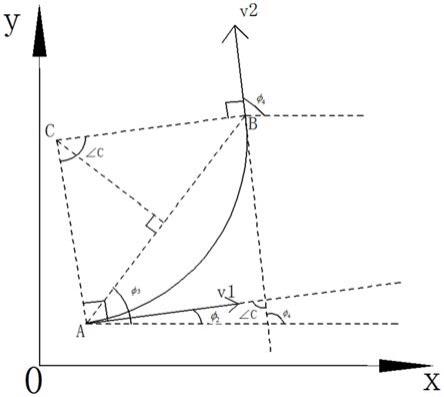
35.图6为本发明自移动设备与充电站对接方法的粗定位回归状态图;
36.图7为本发明自移动设备与充电站对接装置的原理方框图。
具体实施方式
37.为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
38.请参阅图1-图7所示,自移动设备1可以是自动割草机,或者自动吸尘器等,其自动行走于工作区域以进行割草、吸尘等工作。所述自移动设备1通过电源模块(未图示)供电,为了确保电源模块正常供电,可根据电源模块的剩余电量或工作时间智能控制自移动设备1返回充电站2进行充电续能,也可根据需要通过自移动设备1上的触发按钮(未图示)返回充电站2进行充电续能,还可通过在移动终端(未图示)上发送回充信号给自移动设备1以使自移动设备1返回充电站2进行充电续能。
39.在靠近充电站2的区域设置边界线21,边界线21所覆盖的区域小于工作区域。通过无线电探测装置或视觉系统引导自移动设备1在工作区域工作,也可通过无线电探测装置或视觉系统引导自移动设备1从边界线21以外的区域进行粗定位回归,从而使得自移动设备1靠近充电站2,并到达边界线21所覆盖的区域,再通过自移动设备1感应边界线21发出的电磁信号以引导自移动设备1进行精定位回归,从而使得自移动设备1与充电站2对接。其中,所述无线电探测装置可为uwb、zigbee、gps等定位系统。
40.请参阅图1-图3所示,本发明提供一种自移动设备与充电站对接方法,所述充电站2与边界线21相连,所述方法包括以下步骤:
41.步骤s1:控制所述自移动设备1从当前位置靠近对接边界31移动,并判断所述自移动设备1是否感应到边界线信号;如果所述自移动设备1在到达所述对接边界31前或到达所述对接边界31时感应到所述边界线信号,则执行步骤s2;如果所述自移动设备1在到达所述对接边界31时仍未感应到所述边界线信号,则执行步骤s3;
42.步骤s2:通过所述边界线信号控制所述自移动设备1朝所述充电站2移动直至对接成功;
43.步骤s3:控制所述自移动设备1从所述对接边界31朝所述边界线21移动直至感应到所述边界线信号。
44.其中,所述步骤s1为粗定位回归,所述步骤s2为精定位回归,所述步骤s3为粗定位回归与精定位回归的衔接过程。
45.在本发明的另一个实施例中,所述步骤s1的具体过程:通过无线电探测装置控制所述自移动设备1从当前位置靠近对接边界31移动,以实现所述自移动设备1的粗定位回归。所述无线电探测装置包括定位基站3与定位标签,所述定位基站3设于充电站2的预设距离内,所述定位标签设于自移动设备1上,根据定位标签与定位基站3之间的距离控制所述自移动设备1从当前位置靠近对接边界31移动。
46.在本发明的另一个实施例中,所述定位基站3可为uwb定位基站或zigbee定位基站,所述定位基站3的数量可为一个,所述定位基站3布设于所述充电站2的周围。例如,所述定位基站3设于所述充电站2处,或者所述定位基站3间隔设于所述充电站2外。当所述定位基站3设于所述充电站2处,则定位标签与定位基站3之间的距离是指所述自移动设备1与所述充电站2之间的距离。当所述定位基站3间隔设于所述充电站2外,则定位标签与定位基站3之间的距离是指所述自移动设备1与所述充电站2之间的大致距离。
47.在本发明的另一个实施例中,所述定位基站3可为uwb定位基站或zigbee定位基站,所述定位基站3的数量可为多个,所述多个定位基站3布设于所述充电站2的周围,所述定位基站3之一设于所述充电站2处,通过多个定位基站3获得自移动设备1于当前位置的坐标与所述充电站2的坐标,也可根据自移动设备1于当前位置的坐标与所述充电站2的坐标控制自移动设备1从当前位置靠近对接边界31移动。
48.在本发明的另一个实施例中,所述步骤s1的具体过程:通过视觉系统控制所述自移动设备1从当前位置靠近对接边界31移动,所述视觉系统包括设于自移动设备1的摄像头及设于充电站2的以接标识,所述控制所述自移动设备1从当前位置靠近对接边界31的步骤进一步包括:
49.所述摄像头采集环境图像;
50.根据环境图像判断所述自移动设备1与所述充电站2的位置关系;
51.根据所述自移动设备1与所述充电站2的位置关系控制所述自移动设备1从当前位置靠近对接边界31移动。
52.例如,所述充电站2上设有对接标识,对接标识可以是平面/立体/灯源等特殊的标识物。采集到的环境图像中具有对接标识,根据环境图像中的对接标识分析自移动设备1与充电站2的距离,根据所述距离控制所述自移动设备1从当前位置靠近对接边界31移动。
53.在本发明的另一个实施例中,所述边界线21为连接充电站的环形信号线,边界线所围成的形状可根据需要设置,例如,图2所示的矩形的边界线21,图3所示的弧形的边界线21。可根据需要设置所述自移动设备1与所述充电站2的对接结构,例如,在所述自移动设备1或所述充电站2之一端设置充电插片或充电插针,在所述自移动设备1或所述充电站2之另一端设置充电插口,当所述充电插片或充电插针与充电插口电连接,则对接成功。此外,也可以用无线充电的方式进行充电。通过边界线21引导完成与充电站2的精定位回归,进行充电。
54.在本发明的另一个实施例中,所述步骤s3可为控制所述自移动设备1在所述对接边界31沿着对接边界31绕圈移动直至感应到边界线信号。
55.请参阅图2所示,充电站2连接矩形的边界线21,充电站2处设置定位基站3,对接边界31与矩形的边界线21相交设置,交点包括交点a和交点b,矩形的边界线21在对接边界31外的部分为c,对接边界31在矩形的边界线21外的部分为d。粗定位回归后,自移动设备1到
达对接边界31的adb上或边界线21的acb上,若所述自移动设备1到达对接边界31的adb上且距离交点a或交点b较远,所述自移动设备1仍未感应到所述边界线信号,则所述自移动设备1到达对接边界31的adb后,在adb上绕圈移动,例如,顺时针移动至交点b,然后,所述自移动设备1从交点b围绕矩形的边界线21移动,直至与所述充电站2对接成功。
56.在本发明的另一个实施例中,所述步骤s3可为控制所述自移动设备1在所述对接边界31旋转预设角度并继续行走直至感应到边界线信号。
57.请参阅图3所示,充电站2连接弧形的边界线21,充电站2处设置定位基站3,对接边界31与弧形的边界线21相交设置,交点包括交点a和交点b,对接边界31位于弧形的边界线21之外的部分为e,弧形的边界线21在对接边界31外的部分为外侧边界线,弧形的边界线21在对接边界31内的部分为内侧边界线,所述外侧边界线与所述内侧边界线之间形成狭窄通道。粗定位回归后,自移动设备1到达外侧边界线并感应到所述边界线信号,所述自移动设备1围绕弧形的边界线21移动,直至与所述充电站2对接成功。自移动设备1到达对接边界31的aeb,若此时,自移动设备1未感应到所述边界线信号,则控制自移动设备1在对接边界31的aeb旋转预设角度并继续行走直至感应到边界线信号。
58.在本发明的另一个实施例中,定位基站与充电站分隔设置,所述对接边界是以所述定位基站为圆心的对接圆,所述对接圆的半径为ddst,所述充电站连接边界线绕设于对接边界的外围。通过对接边界粗定位回归过程中,所述自移动设备不断靠近定位基站,直至到达边界线。
59.请参阅图4所示,在本发明的另一个实施例中,所述步骤s1进一步包括以下步骤:
60.步骤s11:控制所述自移动设备1从当前位置沿当前方向前进,并判断所述自移动设备1是否感应到边界线信号;如果所述自移动设备1未感应到边界线信号,则执行步骤s12;如果所述自移动设备1已感应到边界线信号,则执行步骤s2;
61.步骤s12:判断所述自移动设备1是否到达对接边界31;如果自移动设备1未到达对接边界31,则执行步骤s13;如果自移动设备1已到达对接边界31,则执行步骤s3;
62.步骤s13:判断所述自移动设备1与所述定位基站3的距离是否缩小;如果所述自移动设备1与所述定位基站3的距离在缩小,则返回执行步骤s11;如果所述自移动设备1与所述定位基站3的距离不在缩小,则执行步骤s14;
63.步骤s14:控制所述自移动设备1沿第一旋转方向旋转第一预定旋转角度,然后再返回执行步骤s11。
64.请参阅图5所示,在本发明的另一个实施例中,所述步骤s1进一步包括以下步骤:
65.步骤s11:控制所述自移动设备1从当前位置沿当前方向前进,并判断所述自移动设备1是否感应到边界线信号;如果所述自移动设备1未感应到边界线信号,则执行步骤s12;如果所述自移动设备1已感应到边界线信号,则执行步骤s2;
66.步骤s12:判断所述自移动设备1是否到达对接边界31;如果自移动设备1未到达对接边界31,则执行步骤s13;如果自移动设备1已到达对接边界31,则执行步骤s3;
67.步骤s13:判断所述自移动设备1与所述定位基站3的距离是否缩小;如果所述自移动设备1与所述定位基站3的距离在缩小,则返回执行步骤s11;如果所述自移动设备1与所述定位基站3的距离不在缩小,则执行步骤s14;
68.步骤s141:控制所述自移动设备1沿第一旋转方向旋转第一预定旋转角度,控制所
述自移动设备1从当前位置沿当前方向前进,并判断所述自移动设备1与所述定位基站3的距离是否缩小;如果所述自移动设备1与所述定位基站3的距离在缩小,则返回执行步骤s11;如果所述自移动设备1与所述定位基站3的距离不在缩小,则执行步骤s15;
69.步骤s15:控制所述自移动设备1沿第一旋转方向的反方向旋转第二预定旋转角度,再控制所述自移动设备1从当前位置沿当前方向前进;然后再返回执行步骤s11。
70.请参阅图6所示,在本发明的另一个实施例中,所述对接边界31是以所述定位基站3为圆心的对接圆,所述对接圆的半径为d
dst
,且至少部分所述边界线21与所述定位基站3的距离不小于d
dst
。
71.控制所述自移动设备1靠近对接边界31移动,所述自移动设备1在点a1、点a
i-1
、点a
i
、点a
i 1
、点a
n
位置时与定位基站3之间的距离分别为d1、d
i-1
、d
i
、d
i 1
、d
n
,所述自移动设备1从当前位置a1(d1>d
dst
),依次经过点a
i-1
(d
i-1
>d
dst
)、点a
i
(d
i
>d
dst
)、点a
i 1
(d
i 1
>d
dst
)后到达对接边界31上的点a
n
(d
n
=d
dst
)。
72.自移动设备1位于点a
i
位置进行随机方向原地旋转第一预定旋转角度θ(如向左旋转90度),旋转后前进;如果所述自移动设备1与所述定位基站3的距离不在缩小,停止前进(如图6点a
i 1
位置),自移动设备1原地反方向旋转第二预定旋转角度2*θ,(如向右旋转180度),旋转后前进到达点a
n
位置。
73.请参阅图7所示,本发明还提供一种自移动设备与充电站对接装置1,所述装置包括:
74.边界线寻找模块100,用于控制所述自移动设备从当前位置靠近对接边界移动;并用于判断自移动设备是否感应到边界线信号;
75.对接控制模块200,用于控制所述自移动设备从所述对接边界朝所述边界线移动直至感应到所述边界线信号;并用于通过所述边界线信号控制所述自移动设备朝所述充电站移动直至对接成功。
76.本发明还提供一种自移动设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述自移动设备与充电站对接方法的步骤。
77.本发明还提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述自移动设备与充电站对接方法的步骤。
78.综上所述,本发明设置对接边界,控制自动移动设备靠近对接边界移动以寻找边界线,可减少自动移动设备寻找边界线的时间,从而提高了自动移动设备的回归效率。
79.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
80.上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。