1.本发明的实施方式涉及带电粒子加速装置及其调整方法。
背景技术:
2.在加速器中,为了控制带电粒子的射束轨道,偏转电磁铁、四极电磁铁、屏幕监视器这样的多个控制设备沿着该射束轨道设置。并且,要求这些控制设备相对于射束轨道高精度地安装。因此,在安装这些控制设备时,进行以建筑物的固定点为基准进行定位的对准调整。另一方面,在加速器中,如仅在入射器的调整中使用的发射监视器那样,存在仅在调整时设置而在通常运转时卸下的设备。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2007
‑
149405
技术实现要素:
6.发明所要解决的课题
7.这样,在对加速器进行施工时,每当从调整阶段切换成通常状态时,都需要反复实施控制设备的精密对准,花费了大量的时间。
8.本发明的实施方式是考虑到这样的情况而完成的,其目的在于提供一种即使在反复实施控制设备的安装的情况下,也不需要反复进行对准调整的带电粒子加速装置及其调整方法。
附图说明
9.图1的(a)是第1实施方式的带电粒子加速装置的通常状态下的俯视图,(b)是b
‑
b部分剖视图,(c)是c
‑
c部分剖视图。
10.图2的(a)是第1实施方式的带电粒子加速装置的调整阶段的俯视图,(b)是b
‑
b部分剖视图,(c)是c
‑
c部分剖视图。
11.图3是第2实施方式的带电粒子加速装置的局部俯视图。
12.图4是图3所示的带电粒子加速装置的限制部件的b
‑
b剖视图。
13.图5的(a)是第3实施方式的带电粒子加速装置的设置时的俯视图,(b)是调整阶段的俯视图,(c)是通常状态下的俯视图。
14.图6是各实施方式的带电粒子加速装置的调整方法的流程图。
具体实施方式
15.(第1实施方式)
16.以下,参照附图对本发明的实施方式进行说明。图1的(a)是第1实施方式的带电粒子加速装置10a的通常状态下的俯视图,图1的(b)是其b
‑
b部分剖视图,图1的(c)是其c
‑
c部
分剖视图。
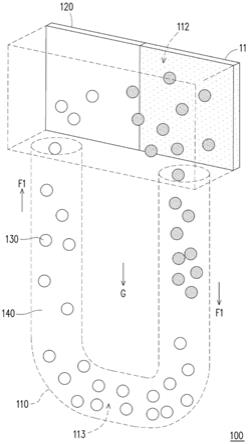
17.这样,带电粒子加速装置10a(10)具备:控制设备15(15a、15b、15c),供带电粒子通过的管道11贯穿,并且对带电粒子的射束轨道12进行控制;以及载台20,由固定于基础件(省略图示)的架台16支承,并且使控制设备15沿着与射束轨道12交叉的方向可逆地移动。
18.带电粒子加速装置10a(10)在多个管道11的两端的接头部分相互连接而形成射束轨道12。将相互邻接的管道11的对置的接头部分(凸缘板)对接,通过螺钉等紧固,将多个管道11相连,由此形成运动的带电粒子的射束轨道12。
19.并且,沿着该射束轨道12设置偏转电磁铁、四极电磁铁、屏幕监视器这样的多个控制设备15(15a、15b、15c),对在管道11的内部空间中运动的带电粒子的轨道进行控制。另外,控制设备15并不限定于这些。
20.架台16是沿着射束轨道12支承作为重量物的带电粒子加速器10a(10)的构造物,构筑在混凝土浇筑的基础件(省略图示)上。另外,在图示中,该架台16例示了将长边方向水平地配置的h型钢,但其方式没有特别限定,也可以根据控制设备15的设置位置,垂直或者倾斜地配置。
21.载台20具有固定于架台16的固定板22、以及固定有控制设备15并且相对于固定板22相对地移动的移动板21。进而,该载台20具有通过轴旋转而使移动板21相对于固定板22移动的直动机构部23。
22.移动板21的下表面与固定板22的上表面抵接并滑动。并且,移动板21被限制沿着射束轨道12的方向的移动,并且能够在与射束轨道12交叉的方向上,以具有控制设备15不与射束轨道12干涉的程度的行程宽度的方式移动。另外,虽然省略图示,但定位在固定板22的上表面的移动板21能够在该位置通过紧固部件等以相对于固定板22不动的方式固定。
23.在移动板21,偏转电磁铁、四极电磁铁、屏幕监视器等的控制设备15(15a、15b、15c)与管道11一起以贯穿使带电粒子通过的轨道中心的方式设置。进而,设置这些控制设备15的移动板21定位在固定板22的上表面并通过紧固部件等固定。这些控制设备15、管道11以及载台20的组装在与带电粒子加速器10a(10)的安装场所不同的场所进行,在一体地组装后输送到安装场所。
24.在带电粒子加速器10a(10)的安装场所中,一体地组装有控制设备15以及管道11的载台20通过能够进行高度调整的结合部件28与架台16的上部结合。作为结合部件28,能够采用广泛使用的螺钉与螺母的组合,但只要是能够稳定地固定高重力物并进行高度调整的部件,便能够适当地采用。
25.要求这些控制设备15相对于射束轨道12高精度地安装。因此,当将设置有这些控制设备15的载台20安装于架台16时,以建筑物的固定点为基准,进行一边进行结合部件28的高度调整一边定位的对准调整。
26.如图1的(c)所示,直动机构部23由固定于移动板21的螺母部27、螺入该螺母部27且两端旋转自如地支承于固定板22的螺纹杆25、以及对该螺纹杆25施加旋转扭矩的旋转驱动部26构成。
27.通过这样构成的直动机构部23,能够使控制设备15、管道11以及移动板21的一体化物从定位的位置朝射束轨道12的侧方退避,进而能够再现性良好地复位到原来的被定位的位置。
28.另外,在图示中,直动机构部23的收纳空间呈槽状设置在固定板22的上表面,但也可以设为相对于移动板21的主面平行地穿通有厚壁部的贯通孔。此外,直动机构部23不是必须的构成要素,控制设备15、管道11以及移动板21的一体化物也可以通过其他的方法、例如人力移动。
29.图2的(a)是第1实施方式的带电粒子加速装置10a的调整阶段的俯视图,图2的(b)是其b
‑
b部分剖视图,图2的(c)是其c
‑
c部分剖视图。在带电粒子加速装置10a(10)的调整阶段中,使载台20的移动板21以控制设备15不与射束轨道12干涉的程度朝侧方或者基于直动机构部23的移动方向移动。
30.然后,在使控制设备15退避后的射束轨道12配置发射度测定装置等的调整设备17。该调整设备17在其两端与调整用管道18一起配置于射束轨道12。如图2的(c)所示,该调整设备17经由支承部件19以及结合部件28相对于架台16,伴随对准调整而相对于射束轨道12高精度地安装。
31.然后,当带电粒子加速装置10a(10)的调整阶段结束时,从架台16除去调整设备17,使退避的控制设备15返回到射束轨道12。该控制设备15不需要为了以高的再现性返回到原来的射束轨道12的位置而再次实施对准调整。
32.(第2实施方式)
33.接着,参照图3以及图4对本发明的第2实施方式进行说明。图3是第2实施方式的带电粒子加速装置10b的局部俯视图。图4是图3所示的限制部件30的b
‑
b剖视图。另外,图3以及图4中具有与图1或者图2共同的结构或者功能的部分标注相同的符号,并省略重复的说明。
34.在第2实施方式的带电粒子加速装置10b中,载台20具有限制移动板21相对于固定板22的移动的限制部件30。如图4所示,限制部件30由与移动板21的一部分抵接的抵接部31、以及固定该抵接部31及固定板22的紧固部件32构成。另外,在抵接部31设置有用于对与移动板21的抵接面的位置进行微调整的调整余量33。另外,该调整余量33也可以不设置在抵接部31侧而设置在固定板22侧。此外,限制部件30的设置位置也可以不是图示的固定板22的主面而是边缘端侧。
35.该限制部件30在将控制设备15以及载台20安装到架台16之后到结束对准调整为止,需要在使抵接部31与移动板21抵接的状态下固定于固定板22。通过这样设置限制部件30,在使在调整阶段退避的控制设备15返回到射束轨道12时,仅通过使移动板21与限制部件30抵接,就能够准确地返回到原来的位置。
36.(第3实施方式)
37.接着,参照图5对本发明的第3实施方式进行说明。图5的(a)是第3实施方式的带电粒子加速装置10c的设置时的俯视图,图3的(b)是调整阶段的俯视图,图5的(c)是通常状态下的俯视图。另外,图5中具有与图1或者图2共同的结构或者功能的部分标注相同的符号,并省略重复的说明。
38.在第3实施方式的带电粒子加速装置10c中,具备与设置有控制设备15(15a、15b、15c)的载台20a分开的、使在调整阶段工作的调整设备17沿着与射束轨道12交叉的方向可逆地移动的载台20b。由此,在调整阶段中,不需要再对准调整就能够实施将控制设备15以及调整设备17交替地调换而定位于射束轨道12的作业。进而,设置有调整设备17的载台20b
在调整阶段结束之后,能够如图5的(c)所示那样卸下。
39.进而,如图5的(c)所示,在各实施方式的带电粒子加速装置10(10a、10b、10c)中,固定板22以及移动板21的除了在通常运转时控制设备15(15a、15b、15c)所占有的区域以外的区域的一部分能够分割。
40.固定板22在以射束轨道12为中心的对称的位置设置有一对分割边界35a。并且,该固定板22采用由一对分割边界35a进行三分割的结构,具有至少在调整阶段中该三分割一体化的结构。同样地,在移动板21,在以射束轨道12为中心的对称的位置,也设置有一对分割边界35b。并且,该移动板21采用由一对分割边界35b进行三分割的结构,具有至少在调整阶段中该三分割一体化的结构。通过这样构成,在调整阶段结束之后,能够除去固定板22以及移动板21的不需要的区域,能够确保带电粒子加速装置10的周边空间。
41.基于图6的流程图对各实施方式的带电粒子加速装置的调整方法进行说明。(适当参照图1~图2)。首先,如图1所示,将使管道11、控制设备15(15a、15b、15c)以及载台20一体化而成的部件安装于架台16(s11)。然后,进行相对于射束轨道12的对准调整(s12)。
42.接着,进入射束的调整工序,如图2所示,使载台20移动以使控制设备15从射束轨道12退避(s13)。然后,在射束轨道12配置调整设备17(s14)。在成为这样的状态之后,从入射器(省略图示)射出带电粒子,调整带电粒子的入射条件(s15)。
43.在带电粒子的入射条件的调整结束时,使调整设备17从射束轨道12退避(s16),使载台20移动而使控制设备15复位到射束轨道12(s17)。然后,反复进行到射束的调整工序结束为止(s13)~(s17)的工序(s18的“否”、“是”、“结束”)。
44.根据以上说明的至少一个实施方式的带电粒子加速装置,通过具有使控制设备沿着与上述射束轨道交叉的方向可逆地移动的载台,即使在反复实施控制设备的安装的情况下,也不需要反复进行对准调整。
45.对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提示的,并不意图对发明的范围进行限定。这些实施方式能够以其他各种方式加以实施,在不脱离发明的主旨的范围内能够进行各种省略、置换、变更、组合。这些实施方式及其变形包含于发明的范围及主旨中,并且包含于技术方案所记载的发明和与其等同的范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。