1.本实用新型涉及机电技术领域,尤其涉及一种多关节吸盘式仿生行走机构。
背景技术:
2.仿生行走机构一直是多足行走机器人研究的一个热点领域,既可以实现在平地上的行走,又可以实现在倾斜表面甚至是光滑倾斜表面的行走更是难上加难。现有技术中,能够实现类似于蜘蛛的多关节行走机构,但也是仅仅局限于平地行走,无法实现倾斜甚至是垂直表面的行走。
技术实现要素:
3.为了解决上述问题,本实用新型提供了一种多关节吸盘式仿生行走机构,该多关节吸盘式仿生行走机构能够攀爬各种倾斜表面,甚至是垂直的光滑表面。
4.为实现上述目的,本实用新型实施例所采用的技术方案如下:
5.一种多关节吸盘式仿生行走机构,包括由若干个舵机串联成串的舵机串,所述舵机串外包覆连接有层叠状的硅胶外壳,所述硅胶外壳上设置有吸盘。
6.进一步地,所述舵机包括u型框架以及舵机盒,所述舵机盒上穿置有第一转轴,所述第一转轴转动连接于所述u型框架上;所述舵机盒上还设置有第二转轴,所述第二转轴与所述第一转轴相垂直,所述第二转轴通过联轴器与相邻舵机的u型框架相连。
7.进一步地,所述舵机串一端头的舵机的第二转轴与所述硅胶外壳通过联轴器连接,所述舵机串另一端头的所述舵机的u型框架通过联轴器与所述硅胶外壳连接。
8.进一步地,所述硅胶外壳上连接有腿部把合板。
9.进一步地,所述吸盘为真空吸盘或者电磁吸盘。
10.本实用新型的一种多关节吸盘式仿生行走机构具有如下有益效果:
11.1、本实用新型,多个舵机串联而成的舵机串,配合弹性的层叠状硅胶外壳,形成多关节多自由度的仿生行走机构,根据不同地面形状,仿生行走机构发生相应弯曲,实现在各种复杂地形上的行走。
12.2、本实用新型,于硅胶外壳上设置吸盘,利用吸盘攀爬和吸附到光滑的表面,实现光滑表面的行走,实用性强。
13.3、本实用新型,吸盘可以为电磁吸盘,利用线圈通电产生磁场从而实现安装该款行走机构的机器人具备在钢铁制成的设备上行走的能力。
附图说明
14.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的上提下,还可以根据这些附图获得其他的附图。
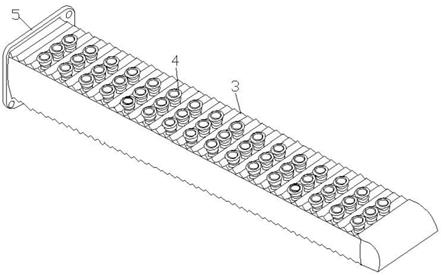
15.图1为本实用新型实施例的多关节吸盘式仿生行走机构的结构示意图;
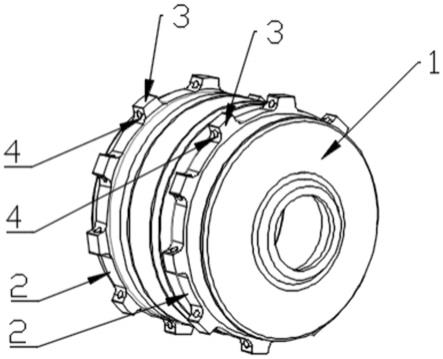
16.图2为本实用新型实施例舵机串的结构示意图;
17.图3为本实用新型实施例舵机的结构示意图。
18.附图标记说明:
[0019]1‑
舵机;11
‑
u型框架;12
‑
舵机盒;121
‑
第一转轴;122
‑
第二转轴;2
‑
舵机串;3
‑
硅胶外壳;4
‑
吸盘;5
‑
腿部把合板。
具体实施方式
[0020]
为了更好的了解本实用新型的目的、结构及功能,下面结合附图,对本实用新型的一种多关节吸盘式仿生行走机构做进一步地详细的描述。
[0021]
如图1~3所示,其示为本实用新型实施例的一种多关节吸盘式仿生行走机构,包括由若干个舵机1串联成串的舵机串2,舵机串2外包覆连接有层叠状的硅胶外壳3,硅胶外壳3上设置有吸盘4。
[0022]
进一步地,舵机1包括u型框架11以及舵机盒12,舵机盒12上穿置有第一转轴121,第一转轴121转动连接于u型框架11上;舵机盒12上还设置有第二转轴122,第二转轴122与第一转轴121相垂直,第二转轴122通过联轴器与相邻舵机1的u型框架11相连。
[0023]
进一步地,舵机串2一端头的舵机1的第二转轴122与硅胶外壳3通过联轴器连接,舵机串2另一端头的舵机1的u型框架11通过联轴器与硅胶外壳3连接。
[0024]
进一步地,硅胶外壳3上连接有腿部把合板5。
[0025]
进一步地,吸盘4为真空吸盘或者电磁吸盘。
[0026]
进一步地,本实用新型利用串联舵机1形成多关节多自由度的吸盘式仿生行走机构。单个舵机1通过软件控制可绕第一转轴121以及第二转轴122发生指定角度的转动。多个舵机串联以后,通过软件操作一个舵机1进行绕第一转轴121的转动或者绕第二转轴122的转动;或者通过软件操作多个舵机1绕第一转轴121的转动或者绕第二转轴122的转动(该处的软件操作为舵机领域的现有技术,此处不再赘述),使得多关节吸盘式仿生行走机构能够根据不同地面形状,腿部发生相应弯曲。例如多关节吸盘式仿生行走机构弯曲成“一”字型、“z”字型、波浪形等任一形状,从而适应平面、坡面、连续坡面以及任意不规则地面上的行走。这样多关节多自由度的吸盘式仿生行走机构,能保证行走机构实现行走功能的同时具有灵活的适应性。
[0027]
进一步地,多关节串联舵机1结构外侧包裹着硅胶外壳3,硅胶外壳3上分布着吸盘4结构,吸盘4结构在抽气机构的作用下进行抽充气。如果把吸盘4和接触面间的空气抽走,实现吸盘4在行走接触面上的吸附,从而可以让仿生行走机构能在光滑面上的行走。如果给吸盘4结构充气,可以实现吸盘4结构和接触面的分离,在多个舵机1串联的作用下实现行走机构的行走。
[0028]
以下借助具体实施例对本实用新型做了进一步地描述,但是应该理解的是,这里具体的描述,不应理解为对本实用新型的实质和范围的限定,本领域内的普通技术人员在阅读本说明书下对下述实施例做出的各种修改,都属于本实用新型所保护的范围。
技术特征:
1.一种多关节吸盘式仿生行走机构,其特征在于,包括由若干个舵机(1)串联成串的舵机串(2),所述舵机串(2)外包覆连接有层叠状的硅胶外壳(3),所述硅胶外壳(3)上设置有吸盘(4)。2.如权利要求1所述的多关节吸盘式仿生行走机构,其特征在于,所述舵机(1)包括u型框架(11)以及舵机盒(12),所述舵机盒(12)上穿置有第一转轴(121),所述第一转轴(121)转动连接于所述u型框架(11)上;所述舵机盒(12)上还设置有第二转轴(122),所述第二转轴(122)与所述第一转轴(121)相垂直,所述第二转轴(122)通过联轴器与相邻舵机(1)的u型框架(11)相连。3.如权利要求2所述的多关节吸盘式仿生行走机构,其特征在于,所述舵机串(2)一端头的舵机(1)的第二转轴(122)与所述硅胶外壳(3)通过联轴器连接,所述舵机串(2)另一端头的所述舵机(1)的u型框架(11)通过联轴器与所述硅胶外壳(3)连接。4.如权利要求3所述的多关节吸盘式仿生行走机构,其特征在于,所述硅胶外壳(3)上连接有腿部把合板(5)。5.如权利要求1所述的多关节吸盘式仿生行走机构,其特征在于,所述吸盘(4)为真空吸盘或者电磁吸盘。
技术总结
本实用新型提供了一种多关节吸盘式仿生行走机构,包括由若干个舵机串联成串的舵机串,所述舵机串外包覆连接有层叠状的硅胶外壳,所述硅胶外壳上设置有吸盘。本实用新型的多关节吸盘式仿生行走机构,能够实现在各种复杂地形上的行走。杂地形上的行走。杂地形上的行走。
技术研发人员:金鑫 张宏涛 迟文伟 齐晓敬 陈野 马萧莉 张立强 刘齐民
受保护的技术使用者:天津交通职业学院
技术研发日:2020.12.30
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。