1.本实用新型涉及除膜设备技术领域,具体地说,涉及一种水平式多工位除膜设备。
背景技术:
2.镀膜玻璃是在玻璃表面涂镀一层或多层金属、合金或金属化合物薄膜,以改变玻璃的光学性能,满足某种特定要求。在镀膜玻璃后段进行的再加工时,需要在镀膜层玻璃的某个位置,去除特定形状的膜层图形,该过程需要使用除膜设备。现有除膜设备的除膜过程包括进料、校正、除膜、出料四步骤,四步骤依次进行,导致整体耗时较长,除膜效率低下。另外除膜过程中镀膜玻璃由传送线支撑,高度方向的精度难以保证,当激光聚焦在传送线上时,易对传送线造成损害。
技术实现要素:
3.本实用新型的目的在于提供一种水平式多工位除膜设备,定位稳定可靠,除膜效率高。
4.本实用新型公开的水平式多工位除膜设备所采用的技术方案是:
5.一种水平式多工位除膜设备,包括机架、送料机构、校正机构以及激光除膜机构,送料机构设于机架且分成至少两组,每组所述送料机构包括送料传送线、传送线升降组件以及支撑组件,所述送料传送线设于传送线升降组件上,在所述送料传送线的传送路径上设一除膜工位,所述支撑组件设于所述除膜工位,所述传送线升降组件驱使送料传送线下降至支撑组件的顶面以下;校正机构设于所述除膜工位,用于对工件进行校正定位;激光除膜机构设于所述送料机构上方,所述激光除膜机构包括水平移动模组和设于水平移动模组的激光除膜装置,所述水平移动模组驱使激光除膜装置在工位之间往复移动。
6.作为优选方案,所述校正机构包括第一方向设置的若干第一校正组件以及第二方向设置的若干第二校正组件,所述第一方向与第二方向相交;若干所述第一校正组件分设在除膜工位的相对两侧,所述第一校正组件用于在第一方向校正工件;若干所述第二校正组件分设在除膜工位的相对另两侧,所述第二校正组件用于在第二方向校正工件。
7.作为优选方案,若干所述第二校正组件分为至少一中间校正组件以及至少两端部校正组件,所述端部校正组件分设于两除膜工位的两端,所述中间校正组件设于两除膜工位之间,所述中间校正组件、端部校正组件、第一校正组件均包括校正移动模组以及设于校正移动模组的限位件,其中,在中间校正组件中,所述校正移动模组驱使该限位件在两除膜工位之间往复移动。
8.作为优选方案,所述限位件的顶面高度超越所述支撑组件的顶面高度;当所述传送线升降组件驱使送料传送线上升至最高位时,所述限位件的顶面高度低于所述送料传送线的顶面高度。
9.作为优选方案,所述支撑组件包括支撑板、设于支撑板的调节杆以及设于调节杆上端的内螺柱,所述调节杆上端伸出支撑板的高度可调。
10.作为优选方案,所述内螺柱顶面为球面。
11.作为优选方案,所述送料机构还包括升降架,若干所述送料传送线平行且间隔的设于所述升降架,所述升降架设于传送线升降组件,由所述传送线升降组件驱使升降架和送料传送线升降。
12.作为优选方案,所述水平移动模组包括两组分设在送料机构两侧的x轴移动模组以及设于两组x轴移动模组上的y轴移动模组,所述激光除膜装置设于y轴移动模组上。
13.作为优选方案,所述水平移动模组还包括大理石平台,所述x轴移动模组、y轴移动模组安装于所述大理石平台上。
14.作为优选方案,所述送料传送线包括同步带,所述同步带为双层设置,包括设于外层的透光层和设于内层的不透光层。
15.本实用新型公开的水平式多工位除膜设备的有益效果是:在激光除膜装置对位于一送料机构除膜工位的玻璃工件进行除膜加工时,另一玻璃工件被输送至另一送料机构的送料传送线上,由送料传送线将其运送至除膜工位,传送线升降组件驱使对应的送料传送线下降,使送料传送线下降至支撑组件的顶面以下,从而使玻璃工件被支撑组件支撑。校正机构对工件进行校正定位。当位于一送料机构除膜工位的玻璃工件除膜结束后,水平移动模组移动激光除膜装置至另一送料机构除膜工位上方,对另一玻璃工件进行除膜。已除膜的玻璃工件对应的传送线升降组件驱使对应的送料传送线上升,使玻璃工件送料传送线支撑,再由该送料传送线将其移出。由于一玻璃工件进行除膜加工同时,另一玻璃工件可同步进行出料、进料、校正,从而极大的提高了除膜效率。同时该设备在激光除膜时,玻璃工件由支撑组件支撑,更容易保证定位高度,且此时送料传送线远离激光的焦点,避免了对送料传送线的损伤。
附图说明
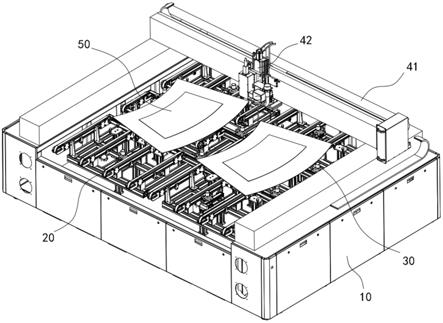
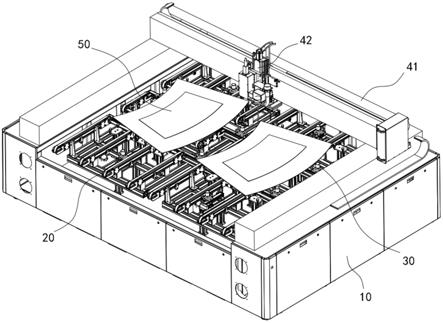
16.图1是本实用新型水平式多工位除膜设备的结构示意图。
17.图2是本实用新型水平式多工位除膜设备的俯视图。
18.图3是本实用新型水平式多工位除膜设备的送料机构、校正机构的俯视图。
19.图4是本实用新型水平式多工位除膜设备的送料机构、校正机构的前视图。
20.图5是本实用新型水平式多工位除膜设备的校正机构的结构示意图。
21.图6是本实用新型水平式多工位除膜设备的支撑组件的结构示意图。
22.图7是本实用新型水平式多工位除膜设备的激光除膜装置的结构示意图。
具体实施方式
23.下面结合具体实施例和说明书附图对本实用新型做进一步阐述和说明:
24.请参考图1,一种水平式多工位除膜设备,包括机架10、送料机构20、校正机构30以及激光除膜机构40。
25.请参考图3和图4,送料机构20设于机架10且分成至少两组。每组所述送料机构20包括送料传送线21、传送线升降组件22以及支撑组件23。所述送料传送线21设于传送线升降组件22上,在所述送料传送线21的传送路径上设一除膜工位,所述支撑组件23设于所述除膜工位,所述传送线升降组件22驱使送料传送线21下降至支撑组件23的顶面以下。其中,
在送料传送线21传送玻璃工件50时,送料传送线21顶面高于支撑组件23的顶面,当工件50被输送至除膜工位时,传送线升降组件22驱使送料传送线21下降至支撑组件23的顶面以下。本实施例中,所述送料机构20设有两组,每组送料机构20对应一除膜工位。
26.请参考图1和图2,校正机构30设于所述除膜工位,校正机构30用于对工件50进行校正定位。激光除膜机构40设于所述送料机构20上方,所述激光除膜机构40包括水平移动模组41和设于水平移动模组41的激光除膜装置42,所述水平移动模组41驱使激光除膜装置42在工位之间往复移动。本实施例中,激光除膜装置42设有一组。在另一实施例中,激光除膜装置42可设有多组,以进一步提升除膜效率。
27.实施过程:在激光除膜装置42对位于一送料机构20除膜工位的玻璃工件50进行除膜加工时,另一玻璃工件50被输送至另一送料机构20的送料传送线21上,由送料传送线21将其运送至除膜工位,传送线升降组件22驱使对应的送料传送线21下降,使送料传送线21下降至支撑组件23的顶面以下,从而使玻璃工件50被支撑组件23支撑。校正机构30对工件50进行校正定位。当位于一送料机构20除膜工位的玻璃工件50除膜结束后,水平移动模组41移动激光除膜装置42至另一送料机构20除膜工位上方,对另一玻璃工件50进行除膜。已除膜的玻璃工件50对应的传送线升降组件22驱使对应的送料传送线21上升,使玻璃工件50送料传送线21支撑,再由该送料传送线21将其移出。
28.请参考图6,所述送料机构20的支撑组件23包括支撑板231、设于支撑板231的调节杆232以及设于调节杆232上端的内螺柱233,所述调节杆232上端伸出支撑板231的高度可调。其中,所述内螺柱233顶面为球面,球面的顶点为支撑点。此时内螺柱233顶面与工件50为点接触,以此最大程度上降低了其与工件50的接触面积,当激光焦点聚焦在内螺柱233顶面时,最大程度上避免了其对玻璃的污染。
29.其中,所述调节杆232包括调节螺杆和穿设于调节螺杆的两螺母,两螺母与调节螺杆螺纹连接,安装时使两螺母夹紧支撑板231。所述内螺柱233具体为尼龙内螺柱233。通过调节内螺柱233顶面的高度,解决了大幅面玻璃校正困难的问题,点支撑采用的是可以通过上下调节进行水平校正,每个点的高度差精度可以调到5个丝以内。
30.请参考图4,所述送料机构20还包括升降架24,若干所述送料传送线21平行且间隔的设于所述升降架24。所述升降架24设于传送线升降组件22,由所述传送线升降组件22驱使升降架24和送料传送线21升降,以此实现每组送料机构20的若干送料传送线21升降高度相同。
31.请参考图3,所述校正机构30包括第一方向设置的若干第一校正组件31以及第二方向设置的若干第二校正组件32,所述第一方向与第二方向相交。具体的,所述第一方向为x轴方向,所述第二方向为y轴方向。
32.若干所述第一校正组件31分设在除膜工位的相对两侧,所述第一校正组件31用于在第一方向校正工件50。若干所述第二校正组件32分设在除膜工位的相对另两侧,所述第二校正组件32用于在第二方向校正工件50。
33.若干所述第二校正组件32分为至少一中间校正组件321以及至少两端部校正组件322,所述端部校正组件322分设于两除膜工位的两端,所述中间校正组件321设于两除膜工位之间,所述中间校正组件321、端部校正组件322、第一校正组件31均包括校正移动模组311以及设于校正移动模组的限位件312。
34.其中,在中间校正组件321中,所述校正移动模组311驱使该限位件312在两除膜工位之间往复移动。此时,在y轴方向上,两个除膜工位共用校正移动模组311和限位件312,以此降低成本。
35.所述限位件312的顶面高度超越所述支撑组件23的顶面高度。当所述传送线升降组件22驱使送料传送线21上升至最高位时,所述限位件312的顶面高度低于所述送料传送线21的顶面高度。此时工件60接触送料传送线21并被其传送,传动至除膜工位时,送料传送线21下降并低于支撑组件23的顶面高度,此时限位件312的顶面高度超越所述支撑组件23的顶面高度,以方便进行校正。
36.请参考图5,所述校正移动模组311包括往复移动的校正滑台3111,所述校正滑台3111上设有导轨、导轨上设有滑块3112,所述限位件312设于该滑块3112上。所述限位件312具体为靠轮。还包括设导轨一端的挡料块3113,挡料块3113用于限制滑块3112移出导轨。所述挡料块3113优选为弹性件如弹簧。校正时,校正滑台滑动,带动滑块3112和限位件312移动,限位件312移动并抵靠于工件60,校正滑台3111继续移动,从而对工件进行校正。通过滑块3112与挡料块3113配合缓冲,降低冲击力。
37.请参考图3,本方案中,第一校正组件31设有四组,其中两组分设在一除膜工位的相对两侧,另两组分设在另一除膜工位的相对另两侧。所述第二校正组件32设有六组,其中中间校正组件321设有两组,端部校正组件322设有四组,两组中间校正组件321设于两除膜工位之间,两组所述端部校正组件322设于一除膜工位的远离中间移动模组一侧,剩余两组所述端部校正组件322设于另一除膜工位的远离中间移动模组一侧。
38.上述方案中,在除膜工位设有感应开关,通过感应开关判断工件50是否移动至除膜工位。
39.请参考图7,所述激光除膜装置42包括z轴升降模组421、扩束镜、反射镜组、场镜、振镜424以及工业相机组件423。z轴升降模组驱使扩束镜、反射镜组、场镜、振镜424以及工业相机组件423升降。所述激光除膜装置42还包括抽尘组件422,所述抽尘组件422用于吸取激光除膜时所产生的粉尘。
40.当校正机构30对玻璃工件50进行机械校正后,所述水平移动模组41移动激光除膜装置42至玻璃工件50上方,工业相机组件423对玻璃进行拍照,对比玻璃的偏移量,由计算机内部计算对比后,对需要除膜的图形和实际玻璃之间的距离进行补偿,补偿位置确定后,由工控机控制激光除膜装置42出光,抽尘组件422开起,吸走激光除膜时所产生的粉尘,同时水平移动模组41也在移动,随时调整位置距离,振镜424同时按前期设置好的图形依次给出。一个周期走完大概需要23秒时间,除膜图形完成。所述水平移动模组41移动到另一除膜工位的玻璃工件50上,依次循环。
41.请参考图1和图2,所述水平移动模组41包括两组分设在送料机构20两侧的x轴移动模组411以及设于两组x轴移动模组411上的y轴移动模组412,所述激光除膜装置42设于y轴移动模组412上。所述水平移动模组41还包括大理石平台,所述x轴移动模组411、y轴移动模组412安装于所述大理石平台上,同时,所述x轴移动模组411、y轴移动模组412采用直线电机作为动力源,以此大大提高静止和运动时的精度与速度。直线电机的速度一般3m/s
‑
6m/s之间,加速度能达到1g
‑
5g,重复定位精度就是0.05/50mm;大理石台00级1000mm*100*40精度可达到3微米。
42.所述送料传送线21包括同步带,所述同步带为双层设置,包括设于外层的透光层和设于内层的不透光层,内外层粘接。当部分激光照射至同步带时,激光透过外层的透光层照射至内层的不透光层,此时在外层与内层之间产生粉尘污染物,避免了上述粉尘污染物对玻璃的污染。具体的,所述同步带采用外层采用白色或透明,内层选用绿色材料。
43.本实用新型公开的水平式多工位除膜设备,由于一玻璃工件50进行除膜加工同时,另一玻璃工件50可同步进行出料、进料、校正,从而极大的提高了除膜效率。同时该设备在激光除膜时,玻璃工件50由支撑组件23支撑,更容易保证定位高度,且此时送料传送线21远离激光的焦点,避免了对送料传送线21的损伤。
44.最后应当说明的是,以上实施例仅用以说明本实用新型的技术方案,而非对本实用新型保护范围的限制,尽管参照较佳实施例对本实用新型作了详细地说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的实质和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。