1.本实用新型涉及清洁机器人技术领域,具体而言,涉及一种清洁机器人基站、清洁机器人及清洁系统。
背景技术:
2.扫地机器人能够实现自动扫地、吸尘、拖地等功能,取代人力,越来越广泛应用于家庭中。其中拖地的功能,能够对地面进行更深入的清洁,受到人们的喜爱。拖地时通常需要给拖布加湿,所以扫地机本体会带有水箱预先装有清水,在拖地过程中,如果清水用完,则需要重新加水。
3.现在的扫地机通常是人工给水箱加水,加多了容易溢出,加少了又影响对拖布的加湿,因此,给扫地机水箱加水的水量较难掌握。
技术实现要素:
4.本实用新型实施例的目的在于提供一种清洁机器人基站、清洁机器人及清洁系统,以解决上述问题。本实用新型实施例通过以下技术方案来实现上述目的。
5.第一方面,本实用新型实施例提供一种清洁机器人基站,适配于清洁机器人,清洁机器人包括机器人水箱,机器人水箱设有进水口和出气口,清洁机器人基站包括外壳、基站水箱和连通管路。外壳具有收容腔,收容腔适于收容清洁机器人。基站水箱位于收容腔内,并具有出水口和进气口,出水口与收容于收容腔的清洁机器人的进水口连通,进气口与收容于收容腔的清洁机器人的出气口连通。连通管路包括水气泵,水气泵连通出气口和进气口。
6.在一种实施方式中,基站水箱包括基站水箱底面,进气口与基站水箱底面具有高度差。
7.在一种实施方式中,基站水箱包括基站水箱顶壳和基站水箱底壳,基站水箱底壳包括基站水箱底面,基站水箱顶壳包括进气口,基站水箱顶壳密封安装于基站水箱底壳。
8.在一种实施方式中,清洁机器人基站还包括加水组件,加水组件弹性连接于外壳并位于收容腔内,加水组件设有过水口,出水口通过过水口与收容于收容腔的清洁机器人的进水口连通。
9.在一种实施方式中,连通管路还包括气体管道,气体管道连通出气口和进气口,水气泵设置于气体管道。
10.在一种实施方式中,连通管路还包括清洗水管道,清洗水管道连接于进水口和出水口之间。
11.在一种实施方式中,收容腔包括第一收容腔和第二收容腔,第一收容腔位于第二收容腔的下方,清洁机器人适于收容于第一收容腔内,基站水箱收容于第二收容腔内。
12.第二方面,本实用新型实施例还提供一种清洁机器人,适配于上述任一清洁机器人基站,清洁机器人包括机器人水箱,机器人水箱设有进水口和出气口,收容于清洁机器人
基站的清洁机器人的进水口与出水口连通,收容于清洁机器人基站的清洁机器人的出气口与进气口连通。
13.在一种实施方式中,机器人水箱包括机器人水箱底面,出气口与机器人底面具有高度差。
14.在一种实施方式中,机器人水箱具有机器人储水腔,机器人水箱还包括凸柱,凸柱凸出于机器人水箱底面,出气口设置于凸柱并与机器人储水腔连通。
15.第三方面,本实用新型实施例还提供一种清洁系统,包括清洁机器人和清洁机器人基站,清洁机器人包括机器人水箱,机器人水箱设有进水口和出气口。清洁机器人基站包括外壳、基站水箱和连通管路,外壳具有收容腔,收容腔适于收容清洁机器人;基站水箱位于收容腔内,并具有出水口和进气口,出水口与收容于收容腔的清洁机器人的进水口连通,进气口与收容于收容腔的清洁机器人的出气口连通;连通管路包括水气泵,水气泵连通出气口和进气口。
16.相较于现有技术,本实用新型提供的清洁机器人基站、清洁机器人及清洁系统,清洁机器人基站包括外壳、基站水箱和连通管路,外壳具有收容腔,收容腔适于收容清洁机器人,基站水箱位于收容腔内,并具有出水口和进气口,出水口与收容于收容腔的清洁机器人的进水口连通,进气口与收容于收容腔的清洁机器人的出气口连通,连通管路包括水气泵,水气泵连通出气口和进气口。当机器人水箱内的水量未达到预设高度时,水气泵将气体从机器人水箱的出气口经进气口送入基站水箱内,此时,机器人水箱内的气压降低,同时,基站水箱内的气压增加,在大气压的作用下,基站水箱内的水通过出水口和进水口进入清洁机器人水箱,实现对机器人水箱加水;当水量达到预设高度时,水气泵将水通过出气口抽向基站水箱内,基站水箱内的水通过出水口和进水口送入清洁机器人水箱,使得机器人水箱内的进水量和出水量达到动态平衡,也即,水量不再变化,从而实现了对机器人水箱的定量加水。
17.本实用新型的这些方面或其他方面在以下实施例的描述中会更加简明易懂。
附图说明
18.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1是本实用新型实施例提供的清洁机器人基站的结构示意图。
20.图2是本实用新型实施例提供的清洁机器人基站给机器人水箱加水的状态示意图。
21.图3是本实用新型实施例提供的外壳的结构示意图。
22.图4是本实用新型实施例提供的基站水箱的结构示意图。
23.图5是本实用新型实施例提供的清洁机器人基站底部的结构示意图。
24.图6是本实用新型实施例提供的清洁机器人的结构示意图。
25.图7是本实用新型实施例提供的机器人水箱的结构示意图。
26.图8是本实用新型实施例提供的清洁系统的结构示意图。
具体实施方式
27.为了便于理解本实用新型实施例,下面将参照相关附图对本实用新型实施例进行更全面的描述。附图中给出了本实用新型的较佳实施方式。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本实用新型的公开内容理解的更加透彻全面。
28.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型实施例中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。
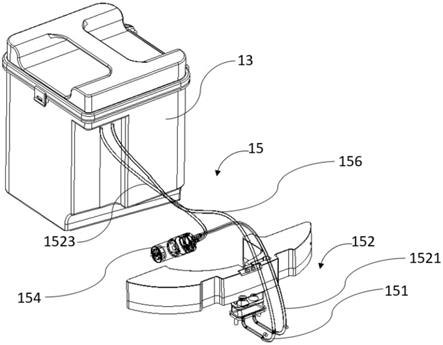
29.请参阅图1和图2,本实用新型实施例提供一种清洁机器人基站10,适配于清洁机器人,清洁机器人包括机器人水箱,机器人水箱设有进水口和出气口,清洁机器人基站10包括外壳11、基站水箱13和连通管路15,在本实施例中,基站水箱13和连通管路15均安装于外壳11内部。连通管路15连接于基站水箱13和机器人水箱之间,使基站水箱13和机器人水箱之间可以相互连通。
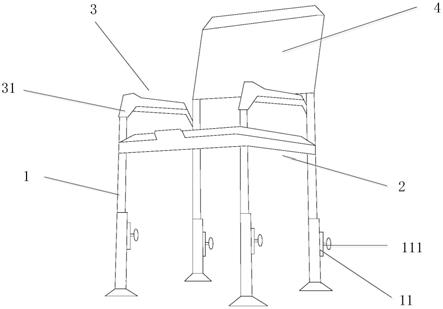
30.请参阅图1和图3,在本实施例中,外壳11大致为长方体结构,外壳11具有收容腔112。收容腔112包括第一收容腔1121和第二收容腔1122。其中第一收容腔1121位于第二收容腔1122的下方,第一收容腔1121适于收容清洁机器人。在本实施例中,第一收容腔1121可以与第二收容腔1122连通。在其他实施方式中,第一收容腔1121还可以与第二收容腔1122隔开。
31.外壳11包括侧壁113、底壁114和顶壁115,其中,底壁114和顶壁115相对,侧壁113连接于底壁114和顶壁115之间,侧壁113、底壁114和顶壁115围成收容腔112。在本实施例中,侧壁113由首尾连接的四个部分组成。在本实施例中,底壁114设置成一定的倾斜角度,可对清洁机器人进行引导,有利于清洁机器人驶入第一收容腔1121内。
32.外壳11还设有开口1131,开口1131与第一收容腔1121连通,其中开口1131为清洁机器人驶入清洁机器人基站10的入口或者驶离清洁机器人基站10的出口。开口1131设置于侧壁113。
33.基站水箱13收容于第二收容腔1122内,可以用于储存清水,以便于对收容于第一收容腔1121内的清洁机器人进行加水。基站水箱13的容量可以根据清洁机器人基站10的尺寸进行设定。在本实施例中,基站水箱13大致为中空的长方体形状。在其他实施方式中,基站水箱13还可以是中空的圆柱体形状或者其他形状。
34.请参阅图4,基站水箱13具有出水口132和进气口134,其中,出水口132与收容于收容腔112的清洁机器人的进水口连通,因此,基站水箱13内的清水可以经出水口132和进水口进入到机器人水箱内,实现对机器人水箱的加水。进气口134与收容于收容腔112的清洁机器人的出气口连通,因此机器人水箱内的气体可以经出气口和进气口134进入基站水箱13内,由于机器人水箱内的气体进入基站水箱13内,因此机器人水箱内的气压会降低,基站水箱13内的气压会增加,在大气压的作用下,基站水箱13内的清水可以经出水口132和进水口进入到机器人水箱内,实现对机器人水箱加水。
35.基站水箱13包括基站水箱顶壳136和基站水箱底壳138,基站水箱顶壳136密封安装于基站水箱底壳138。在本实施例中,密封安装指的是基站水箱顶壳136与基站水箱底壳138之间的间隙被密封件(图未示)填充,其中,密封件可以是硅胶或者橡胶等材质。在其他
实施方式中,基站水箱顶壳136还可以与基站水箱底壳138通过一体注塑成型支撑,也即,基站水箱顶壳136与基站水箱底壳138为整体结构。由于基站水箱顶壳136密封安装于基站水箱底壳138,因此可以在基站水箱13内形成一个密闭空间,减少来自机器人水箱内的气体的溢出,使基站水箱13内的清水可以经出水口132和进水口高效地进入到机器人水箱内,提升对机器人水箱加水的加水效率。
36.基站水箱底壳138包括基站水箱底面1381,基站水箱顶壳136包括进气口134,由于,基站水箱顶壳136密封安装于基站水箱底壳138,因此进气口134与基站水箱底面1381具有高度差。需要说明的是,当进气口134位于水面下,部分气体会溶于水,使得基站水箱13内增加的气压量小于机器人水箱内减少的气压量,也即,会降低对机器人水箱的加水效率。因此,在本实施例中,基站水箱13内的清水的存水高度应小于进气口134的高度,也即,机器人水箱内的气体从水面上进入基站水箱13内,减少溶于水的气体量。
37.请参阅图2和图4,连通管路15包括气体管道152和水气泵154,水气泵154通过气体管道152连接于基站水箱13和机器人水箱之间。
38.在本实施例中,气体管道152连接出气口和进气口134。具体地,气体管道152包括第一管道1521和第二管道1523,其中,第一管道1521连接于水气泵154和机器人水箱的出气口之间,第二管道1523连接于水气泵154和基站水箱13之间。在本实施例中,第一管道1521和第二管道1523都可以是pe材质的透明水管。
39.水气泵154设置于气体管道152,具体地,水气泵154通过第一管道1521与出气口连通,并且通过第二管道1523与进气口134连通,因此,水气泵154在工作时,可以将机器人水箱内的气体经出气口抽出并经进气口134导入基站水箱13内。当机器人水箱内的水量未达到预设高度时,水气泵154将气体从机器人水箱的出气口经进气口134送入基站水箱13内,此时,机器人水箱内的气压降低,同时,基站水箱13内的气压增加,在大气压的作用下,基站水箱13内的水通过出水口132和进水口进入清洁机器人水箱,实现对机器人水箱加水;当水量达到预设高度时,水气泵154将水通过出气口抽向基站水箱13内,基站水箱13内的水通过出水口132和进水口送入清洁机器人水箱,使得机器人水箱内的进水量和出水量达到动态平衡,也即,清水在机器人水箱中达到一定容量后不再增加,从而实现了对机器人水箱的定量加水。需要说明的是,水气泵154可以选自市场中通用的水气两用泵。
40.连通管路15还包括清洗水管道156,清洗水管道156连接于进水口和出水口132之间。在水气泵154将气体从机器人水箱的出气口经进气口134送入基站水箱13内时,基站水箱13内的水通过出水口132、清洗水管道156和进水口进入清洁机器人水箱,实现对机器人水箱加水。清洗水管道156可以是pe材质的透明水管。
41.请参阅图3和图5,清洁机器人基站10还设有充电接口17,充电接口17设置于第二收容腔1122内,当清洁机器人监控到电量不足时便返回清洁机器人基站10的第一收容腔1121内并且自动对接充电接口17进行充电续航。
42.清洁机器人基站10还包括加水组件19,加水组件19弹性连接于外壳11并位于收容腔112内。加水组件19可以用于对收容于第一收容腔1121内的清洁机器人的水箱加水。在本实施例中,加水组件19弹性设置于底壁114,因此,清洁机器人收容于第一收容腔1121内,且位于预设位置时,加水组件19可以对机器人水箱进行加水。其中,预设位置指的是清洁机器人的停止位置,可以是清洁机器人与充电接口17对接时的位置。
43.加水组件19设有过水口192,出水口132通过过水口192与收容于收容腔112的清洁机器人的进水口连通。过水口192可以通过清洗水管道156与出水口132连通,当清洁机器人收容于第一收容腔1121内,且位于预设位置时,过水口192可以与进水口连通,从而将基站水箱13内的水导向机器人水箱,对机器人水箱加水。
44.综上,本实用新型提供的清洁机器人基站10,包括外壳11、基站水箱13和连通管路15,外壳11具有收容腔112,收容腔112适于收容清洁机器人,基站水箱13位于收容腔112内,并具有出水口132和进气口134,出水口132与收容于收容腔112的清洁机器人的进水口连通,进气口134与收容于收容腔112的清洁机器人的出气口连通,连通管路15包括水气泵154,水气泵154连通出气口和进气口134。当机器人水箱内的水量未达到预设高度时,水气泵154将气体从机器人水箱的出气口经进气口134送入基站水箱13内,此时在大气压的作用下,基站水箱13内的水通过出水口132和进水口送入清洁机器人水箱,实现对机器人水箱加水;当水量达到预设高度时,水气泵154将水通过出气口抽向基站水箱13内,基站水箱13内的水通过出水口132和进水口送入清洁机器人水箱,使得机器人水箱内的水量不再变化,从而实现了对机器人水箱的定量加水。
45.请参阅图4、图6和图7,本实用新型实施例还提供一种清洁机器人20,适配于清洁机器人基站10。清洁机器人20包括机体22和机器人水箱24,机器人水箱24可拆卸地安装于机体22。其中安装方式可以是卡接、螺钉连接或者其他方式。在本实施例中,清洁机器人20水箱大致为弯月状,以与机体22适配。在其他实施方式中,在满足与机体22适配的情况下,清洁机器人20还可以是圆形、椭圆形或者其他形状。
46.机器人水箱24设有进水口241和出气口242,收容于清洁机器人基站10的清洁机器人20的进水口241与出水口132连通,收容于清洁机器人基站10的清洁机器人20的出气口242与进气口134连通。
47.机器人水箱24包括机器人水箱顶壳245和机器人水箱底壳246,机器人水箱顶壳245密封安装于机器人水箱底壳246。也即,机器人水箱顶壳245与机器人水箱底壳246之间的间隙也可以被密封件(图未示)填充,其中,密封件可以是硅胶或者橡胶等材质。在其他实施方式中,机器人水箱顶壳245还可以与机器人水箱底壳246通过一体注塑成型支撑,也即,机器人水箱顶壳245与机器人水箱底壳246为整体结构。由于机器人水箱顶壳245密封安装于机器人水箱底壳246,因此可以在机器人水箱24内形成一个密闭空间,减少自外界环境进入机器人水箱24内的气体量,使基站水箱13内的清水可以经出水口132和进水口241高效地进入到机器人水箱24内,提升对机器人水箱24加水的加水效率。
48.机器人水箱底壳246包括机器人水箱底面2461,机器人水箱底面2461与出气口242具有高度差。在机器人水箱24内的水量未达到预设高度时,基站水箱13内的水通过出水口132和进水口241送入清洁机器人20水箱,实现对机器人水箱24加水;当水量达到预设高度时,机器人水箱24内的水量不再变化。也就是说,出气口242与机器人水箱底面2461之间的高度差即等于预设高度,预设高度也是机器人水箱24能加水的最大高度。因此,可以通过调整出气口242的高度,来调整机器人水箱24内的储水高度。
49.机器人水箱24具有机器人储水腔247,机器人储水腔247为机器人水箱顶壳245和机器人水箱底壳246围合形成的密闭空间。
50.在本实施例中,机器人水箱24还包括凸柱249,凸柱249凸出于机器人水箱底面
2461,出气口242设置于凸柱249并与机器人储水腔247连通,因此,出气口242与机器人水箱底面2461之间具有高度差。在其他实施方式中,在出气口242设置于机器人水箱顶壳245的情况下,机器人水箱24还可以不设置凸柱249。
51.综上,本实用新型提供的清洁机器人20,适配于清洁机器人基站10,清洁机器人20包括机器人水箱24,机器人水箱24设有进水口241和出气口242,收容于清洁机器人基站10的清洁机器人20的进水口241与出水口132连通,收容于清洁机器人基站10的清洁机器人20的出气口242与进气口134连通,实现了清洁机器人基站10对清洁机器人20的机器人水箱24的定量加水。
52.请参阅图8,本实用新型实施例还提供一种清洁系统1,包括清洁机器人20和清洁机器人基站10。
53.清洁机器人20收容于收容腔112内。清洁机器人20包括机器人水箱24,机器人水箱24设有进水口241和出气口242。
54.请参阅图2、图4和图7,清洁机器人基站10包括外壳11、基站水箱13和连通管路15。外壳11具有收容腔112,收容腔112适于收容清洁机器人20。基站水箱13位于收容腔112内,并具有出水口132和进气口134,出水口132与收容于收容腔112的清洁机器人20的进水口241连通,进气口134与收容于收容腔112的清洁机器人20的出气口242连通。连通管路15包括水气泵154,水气泵154连通出气口242和进气口134。
55.综上,本实用新型提供的清洁系统1,包括清洁机器人20和清洁机器人基站10,清洁机器人20包括机器人水箱24,机器人水箱24设有进水口241和出气口242,清洁机器人基站10包括外壳11、基站水箱13和连通管路15,外壳11具有收容腔112,收容腔112适于收容清洁机器人20,基站水箱13位于收容腔112内,并具有出水口132和进气口134,出水口132与收容于收容腔112的清洁机器人20的进水口241连通,进气口134与收容于收容腔112的清洁机器人20的出气口242连通,连通管路15包括水气泵154,水气泵154连通出气口242和进气口134。当机器人水箱24内的水量未达到预设高度时,水气泵154将气体从机器人水箱24的出气口242经进气口134送入基站水箱13内,此时,机器人水箱24内的气压降低,同时,基站水箱13内的气压增加,在大气压的作用下,基站水箱13内的水通过出水口132和进水口241进入清洁机器人20水箱,实现对机器人水箱24加水;当水量达到预设高度时,水气泵154将水通过出气口242抽向基站水箱13内,基站水箱13内的水通过出水口132和进水口241送入清洁机器人20水箱,使得机器人水箱24内的进水量和出水量达到动态平衡,也即,水量不再变化,从而实现了对机器人水箱24的定量加水。
56.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。