1.本实用新型涉及一种医疗器械,尤其涉及一种智能辅助起坐轮椅。
背景技术:
2.目前, 随着人口红利的急剧消失,老龄人口的快速增长已经成为人口增长的大体趋势。随着年龄的增长,让大量具有走动能力的老年人因为缺乏站立的能力,而仍然被困在椅子上。老年人无法从座位起立,无法正常的站立,需要他人的照顾辅助站起,这将会严重的影响了老年人的身心健康,同时对家庭和社会也造成了巨大的经济负担。
3.现有的轮椅大多功能单一,仅能实现载人行进功能。
技术实现要素:
4.本实用新型的目的是提供一种智能辅助起坐轮椅,能够在保持现有轮椅座椅模式及行走模式的前提下,实现站立模式和躺椅模式。
5.本实用新型采用下述技术方案:
6.一种智能辅助起坐轮椅,包括底架系统、椅座系统和椅背系统,底架系统上设置有行走装置,行走装置用于实现底架系统的移动,椅座系统与底架系统之间设置有椅座抬升装置,椅座系统的前端与椅座抬升装置前端铰接,椅座抬升装置用于驱动底座系的非铰接端以铰接端为轴转动至与地面垂直状态,椅背系统的下端与椅座系统的后侧铰接。
7.所述的椅座系统包括轮椅底架,行走装置包括行走轮、万向轮和行走驱动电机,轮椅底架后端两侧均设置有行走轮,轮椅底架前端两侧均设置有万向轮,行走驱动电机驱动行走轮转动。
8.所述的椅座抬升装置包括第一抬升结构和第二抬升结构,第一抬升结构包括第一滑轨组件、第一连接轴、第一连接臂组件和第一驱动装置;第一滑轨组件包括水平对称设置在底架系统上表面且结构相同的第一左滑轨和第一右滑轨,第一左滑轨和第一右滑轨上均水平向开设有连接轴滑动槽,第一连接轴设置在连接轴滑动槽内且与第一左滑轨和第一右滑轨滑动连接,第一连接轴的两端分别突出于第一左滑轨和第一右滑轨,第一连接臂组件包括水平对称设置且结构相同的第一左连接臂和第一右连接臂,第一左连接臂和第一右连接臂的后端分别与第一连接轴的左端和右端铰接,第一左连接臂和第一右连接臂的前端分别与椅座系统的前端左右两侧铰接;第一驱动装置设置在轮椅底架上,且第一驱动装置的输出端与连接在第一左连接臂和第一右连接臂前部之间的连接板铰接;
9.所述的第二抬升结构包括第二滑轨组件、第二连接轴、第二连接臂组件和第二驱动装置,第二滑轨组件包括水平对称设置在椅座系统下表面且结构相同的第二左滑轨和第二右滑轨,第二左滑轨和第二右滑轨上均水平向开设有连接轴滑动槽,第二连接轴设置在连接轴滑动槽内且与第二左滑轨和第二右滑轨滑动连接,第二连接臂组件包括水平对称设置且结构相同的第二左连接臂和第二右连接臂,第二左连接臂和第二右连接臂的上端分别与第二连接轴铰接,第二左连接臂和第二右连接臂的下端分别与第一左连接臂和第一右连
接臂的前部铰接;第二驱动装置设置在椅座系统下表面,且第二驱动装置的输出端与第二连接轴中部铰接。
10.所述的椅座系统包括坐垫支架、坐垫底板和坐垫,坐垫设置在坐垫底板上,坐垫底板设置在坐垫支架上;第一左连接臂和第一右连接臂的前端分别与坐垫支架的前端左右两侧铰接;第二左滑轨和第二右滑轨分别设置在坐垫底板下表面左右两侧,第二驱动装置设置在坐垫底板中部。
11.还包括腿部支撑系统,腿部支撑系统包括背板、脚踏和脚踏转动驱动装置,背板的上端与椅座系统的前端铰接,背板的下端与脚踏铰接,脚踏转动驱动装置设置在背板和脚踏之间,脚踏转动驱动装置驱动脚踏以铰接端为轴转动。
12.所述的脚踏转动驱动装置包括第三驱动装置、第三连接轴、第三连接臂组件和第三滑轨组件,第三滑轨组件包括竖直对称设置在背板后表面且结构相同的第三左滑轨和第三右滑轨,第三左滑轨和第三右滑轨上均竖向开设有连接轴滑动槽,第三连接轴设置在连接轴滑动槽内且与第三连接轴滑动槽滑动连接,第三驱动装置竖向设置在背板后表面且第三驱动装置的输出端与第三连接轴中部连接,第三连接臂组件包括第三左连接臂和第三右连接臂,第三连接轴的两端分别突出于第三左滑轨和第三右滑轨,第三左连接臂和第三右连接臂的上端分别与第三连接轴的左右两端铰接,第三左连接臂和第三右连接臂的下端分别与脚踏的后端铰接。
13.所述的背板的前表面设置有腿垫,背板的上端与椅座系统的前端铰接处均设置有角度调节锁紧装置。
14.所述的椅背系统包括椅背和铰接设置在椅背左右两侧的扶手,椅背的后表面沿水平向分别设置有扶手转动电机,扶手转动电机驱动扶手在椅背两侧转动以调节角度;椅背通过伸缩杆与椅座系统的后侧铰接,椅背后表面还设置有高度调节电机,高度调节电机的输出端与椅座系统的后侧铰接,高度调节电机用于调节椅背高度。
15.所述的椅背系统的下端与椅座系统的后侧的铰接处设置有角度调节锁紧装置。
16.所述的椅座系统上还设置有电池模块。
17.本实用新型能够实现座椅模式、行走模式、站立模式和躺椅模式,既能够实现传统轮椅的行进功能,又能够有效满足老年人或其他使用者的使用需求,克服因生理机能衰退或疾病引发的站立困难问题。
附图说明
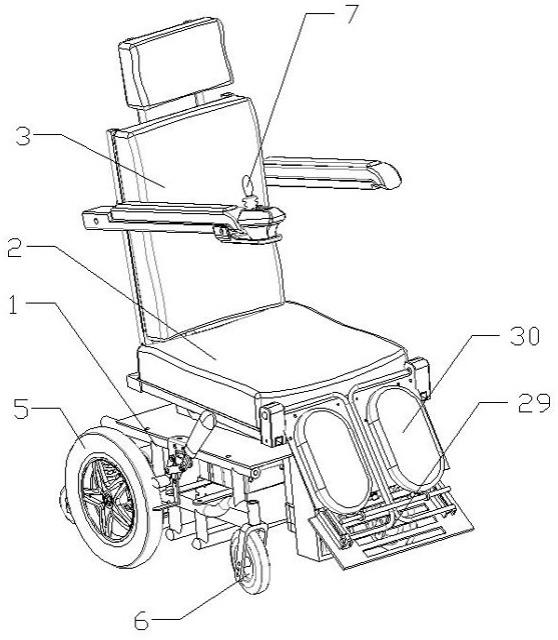
18.图1为本实用新型的结构示意图;
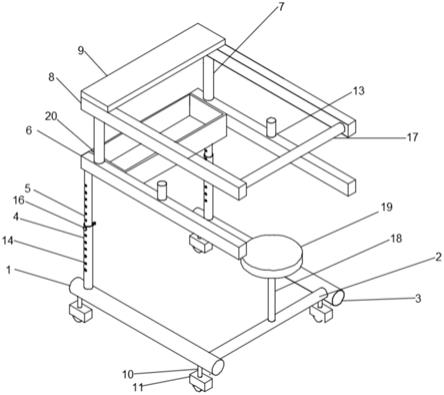
19.图2为本实用新型中底架系统的爆炸结构示意图;
20.图3为本实用新型中椅背系统的爆炸结构示意图;
21.图4为本实用新型中腿部支撑系统的爆炸结构示意图;
22.图5为本实用新型中椅座抬升装置的结构示意图;
23.图6为本实用新型中椅座抬升装置抬升后的结构示意图;
24.图7为本实用新型中腿部支撑系统中脚踏收纳时的结构示意图;
25.图8为本实用新型中腿部支撑系统中脚踏展开水平时的结构示意图;
26.图9为本实用新型处于站立模式时的结构示意图;
27.图10为本实用新型处于躺椅模式时的结构示意图
具体实施方式
28.以下结合附图和实施例对本实用新型作以详细的描述:
29.如图1至图10所示,本实用新型所述的智能辅助起坐轮椅,包括底架系统1、椅座系统2和椅背系统3;底架系统1用于为整个轮椅提供支撑,并为椅座系统2和椅背系统3提供安置空间。底架系统1上设置有行走装置,行走装置用于实现底架系统1的移动,椅座系统2与底架系统1之间设置有椅座抬升装置4,椅座系统2的前端与椅座抬升装置4前端铰接,椅座抬升装置4用于驱动底座系的非铰接端以铰接端为轴转动至与地面垂直状态,以实现从座椅模式到站立状态的转化。椅背系统3的下端与椅座系统2的后侧铰接,保证椅背37角度可调。
30.本实用新型中,椅座系统2包括轮椅底架10,行走装置包括行走轮5、万向轮6和行走驱动电机11,轮椅底架10后端两侧均设置有行走轮5,轮椅底架10前端两侧均设置有万向轮6,行走驱动电机11驱动行走轮5转动。万向轮6用于实现轮椅的转向功能,行走驱动电机11提供动力驱动行走轮5实现行走功能。本实用新型中还可设置控制手柄7,以控制万向轮6的转弯及行走轮5的转动,属于本领域常规技术,在此不再赘述。
31.本实用新型中,椅座抬升装置4包括第一抬升结构8和第二抬升结构9,两组抬升机构共同作用,实现椅座从水平状态到竖直状态的改变。第一抬升结构8包括第一滑轨组件、第一连接轴14、第一连接臂组件和第一驱动装置17;第一滑轨组件包括水平对称设置在底架系统1上表面且结构相同的第一左滑轨12和第一右滑轨13,第一左滑轨12和第一右滑轨13上均水平向开设有连接轴滑动槽,第一连接轴14设置在连接轴滑动槽内且与第一左滑轨12和第一右滑轨13滑动连接,第一连接轴14的两端分别突出于第一左滑轨12和第一右滑轨13,第一连接臂组件包括水平对称设置且结构相同的第一左连接臂15和第一右连接臂16,第一左连接臂15和第一右连接臂16的后端分别与第一连接轴14的左端和右端铰接,第一左连接臂15和第一右连接臂16的前端分别与椅座系统2的前端左右两侧铰接;第一驱动装置17竖向设置在轮椅底架10上,且第一驱动装置17的输出端与连接在第一左连接臂15和第一右连接臂16前部之间的连接板18铰接。第一驱动装置17可采用电动推杆或液压伸缩杆40。
32.所述的第二抬升结构9包括第二滑轨组件、第二连接轴21、第二连接臂组件和第二驱动装置24,第二滑轨组件包括水平对称设置在椅座系统2下表面且结构相同的第二左滑轨19和第二右滑轨20,第二左滑轨19和第二右滑轨20上均水平向开设有连接轴滑动槽,第二连接轴21设置在连接轴滑动槽内且与第二左滑轨19和第二右滑轨20滑动连接,第二连接臂组件包括水平对称设置且结构相同的第二左连接臂22和第二右连接臂23,第二左连接臂22和第二右连接臂23的上端分别与第二连接轴21铰接,第二左连接臂22和第二右连接臂23的下端分别与第一左连接臂15和第一右连接臂16的前部铰接;第二驱动装置24设置在椅座系统2下表面,且第二驱动装置24的输出端与第二连接轴21中部铰接。第二驱动装置24可采用丝杠电机。
33.本实施例中,椅座系统2包括坐垫支架25、坐垫底板26和坐垫27,坐垫27设置在坐垫底板26上,坐垫底板26设置在坐垫支架25上;第一左连接臂15和第一右连接臂16的前端分别与坐垫支架25的前端左右两侧铰接;第二左滑轨19和第二右滑轨20分别设置在坐垫底
板26下表面左右两侧,第二驱动装置24设置在坐垫底板26中部。
34.为了进一步提高使用时的舒适性,且配合本实用新型站立模式下使用者的双脚踩踏,本实用新型还包括腿部支撑系统。腿部支撑系统包括背板28、脚踏29和脚踏转动驱动装置,背板28的上端与椅座系统2的前端铰接,背板28的下端与脚踏29铰接,脚踏转动驱动装置设置在背板28和脚踏29之间,脚踏转动驱动装置驱动脚踏29以铰接端为轴转动,以实现脚踏29从竖直到水平的转动。背板28的前表面还设置有腿垫30,便于坐姿状态下对使用者腿部进行支撑。
35.本实施例中,所述的脚踏转动驱动装置包括第三驱动装置31、第三连接轴32、第三连接臂组件和第三滑轨组件,第三滑轨组件包括竖直对称设置在背板28后表面且结构相同的第三左滑轨33和第三右滑轨34,第三左滑轨33和第三右滑轨34上均竖向开设有连接轴滑动槽,第三连接轴32设置在连接轴滑动槽内且与第三连接轴滑动槽滑动连接,第三驱动装置31竖向设置在背板28后表面且第三驱动装置31的输出端与第三连接轴32中部连接,第三连接臂组件包括第三左连接臂35和第三右连接臂36,第三连接轴32的两端分别突出于第三左滑轨33和第三右滑轨34,第三左连接臂35和第三右连接臂36的上端分别与第三连接轴32的左右两端铰接,第三左连接臂35和第三右连接臂36的下端分别与脚踏29的后端铰接。第三驱动装置31可采用丝杠电机。
36.本实用新型中,椅背系统3包括椅背37和铰接设置在椅背37左右两侧的扶手38,椅背37的后表面沿水平向分别设置有扶手转动电机39,扶手转动电机39驱动扶手38在椅背37两侧转动以调节角度;椅背37通过伸缩杆40与椅座系统2的后侧铰接,椅背37后表面还设置有高度调节电机41,高度调节电机41的输出端与椅座系统2的后侧铰接,高度调节电机41用于调节椅背37高度。扶手转动电机39可采用步进旋转电机,高度调节电机41可采用步进直线电机。
37.所述的椅背系统3的下端与椅座系统2的后侧的铰接处,以及背板28的上端与椅座系统2的前端铰接处均设置有角度调节锁紧装置。角度调节锁紧装置广泛应用于现有坐椅、躺椅等产品中,在此不再赘述。角度调节锁紧装置可采用电控角度调节锁紧装置。
38.本实用新型中,椅座系统2上还设置有电池模块42,能够为各电动设备进行供电。
39.本实用新型在使用时,分为座椅模式、行走模式、站立模式和躺椅模式。
40.座椅模式下,椅座抬升装置4中的第一驱动装置17和第二驱动装置24均处于初始状态,椅座系统2处于水平状态,椅背系统3处于竖直状态,使用者使用时处于坐姿状态。
41.行走模式下,使用者可通过控制手柄7控制万向轮6的转弯以提交行进方向,并通过控制手柄7控制行走轮5转动实现行进。
42.当本实用新型从座椅模式转变为站立模式时,椅座抬升装置4中的第一驱动装置17动作,随着第一驱动装置17输出端的伸长,通过连接板18驱动第一左连接臂15和第一右连接臂16的前部上升,当第一驱动装置17输出端到达极限位置后,椅座抬升装置4中的第二驱动装置24动作,随着第二驱动装置24输出端的缩短,第二连接轴21铰接沿连接轴滑动槽下降,此时第二连接轴21驱动第二左连接臂22和第二右连接臂23的上端向前运动,从而驱动椅座系统2达到竖直状态;此时椅座系统2及椅背系统3均处于竖直状态;最后,脚踏转动驱动装置中的第三驱动装置31伸长,通过第三连接轴32带动第三左连接臂35和第三右连接臂36的下端下降,从而驱动脚踏29的前端抬起至水平装置,以便于使用者踩踏,承担使用者
人体重量。
43.当本实用新型从座椅模式转变为躺椅模式时,使用者可通过椅背系统3的下端与椅座系统2的后侧的铰接处设置的角度调节锁紧装置,调节椅背系统3与椅座系统2之间的角度;然后座抬升装置中的第一驱动装置17动作,随着第一驱动装置17输出端的伸长,使椅座系统2的前部升高;最后再通过背板28的上端与椅座系统2的前端铰接处设置的角度调节锁紧装置,调节背板28及腿垫30的角度,以实现更好的使用感受。
44.上述各个模式中,均可通过扶手转动电机39调节两侧扶手38的角度;并可通过高度调节电机41,调节椅背37高度,以适应不同身高的使用者使用。
45.本实用新型中,可利用控制模块,结合现有技术中电机控制技术,自动实现各个驱动装置和电机的转动,使本实用新型具备姿态记忆功能,能够在控制模块控制下,一键转变为预设好的工作模式。
46.本实用新型能够实现座椅模式、行走模式、站立模式和躺椅模式,既能够实现传统轮椅的行进功能,又能够有效满足老年人或其他使用者的使用需求,克服因生理机能衰退或疾病引发的站立困难问题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。