1.本实用新型涉及一种垃圾桶,具体涉及一种基于视觉伺服系统的智能分类垃圾桶。
背景技术:
2.垃圾分类可以减少占地、减少污染、变废为宝,从国家战略和国家高质量发展的高度,深刻阐明垃圾分类的极端重要性。自此,垃圾分类被放在一个前所未有的高度,引起社会各界的广泛重视。
3.然而,垃圾种类繁多,当下众多市民由于相关知识受限,分类能力和意识不强,并布不能在生活中很好的实现垃圾分类的目标,给生活带来了很大的困扰,并且人工操作也存在卫生问题,因此,一款可以实现自主垃圾分类的智能垃圾桶,可以为他们带来极大便利。
4.所述垃圾桶需要具备可以自主将从指定区域投入的垃圾识别、判定种类:可回收垃圾、厨余垃圾、有害垃圾、其他垃圾四类,并将识别后的垃圾分类储存的功能。
5.目前,借助于神经网络,视觉识别技术对常见物体进行别的准确率已经到98%以上,已被广泛运用于生产生活的各个领域之中。
技术实现要素:
6.针对垃圾分类这一难题,本实用新型基于伺服系统和视觉识别技术设计了一种基于视觉伺服系统的智能分类垃圾桶。
7.其技术内容为一种基于视觉伺服系统的智能分类垃圾桶,包括主体部分、垃圾抓取识别部分,所述主体部分包括箱体、垃圾识别台、垃圾分区挡板,所述箱体一侧设有垃圾投入口,在箱体内部垃圾投入口对应位置设有垃圾识别台,所述垃圾投入口上方设有红外传感器,所述箱体内部在垃圾投入口一旁设有舵机b,所述舵机b通过摇臂连接垃圾投入口,所述箱体内底部设有垃圾分区挡板将箱体内底部分为四块区域,所述垃圾分区挡板顶部设有距离传感器;
8.所述垃圾抓取识别部分包括:摄像头、光轴a、光轴b、直线轴承a、直线轴承b、直线轴承c、直线轴承d、轴支座a、轴支座b、光轴c、光轴d、横轴、竖轴、顶座、移动平台、底座、机械爪,所述箱体以设有垃圾投入口一面为左,在所述箱体内部顶部左侧设有光轴a,右侧设有光轴c,所述光轴a,光轴c相互平行,所述箱体内部略高于光轴a,光轴c后侧设有光轴b,前侧设有光轴d,所述光轴b、光轴d相互平行,所述光轴b通过直线轴承a设有两个轴支座a,所述光轴d上通过直线轴承b设有两个轴支座b,所述光轴b上两个轴支座a与光轴d上两个轴支座b通过横轴连接,所述光轴c底部设有大步进电机b,所述大步进电机b通过同步带c连接光轴c,所述光轴c通过同步带b中途连接光轴b上的两个轴支座a再连接至光轴a,所述横轴中间通过直线轴承c连接移动平台28,所述移动平台上方平行设有顶座,所述移动平台下方平行设有底座,所述顶座与底座之间设有竖轴,所述竖轴中间设有丝杠,所述丝杠穿过移动平台
一侧,所述竖轴通过直线轴承d连接移动平台,所述顶座上设有大步进电机a,所述大步进电机a通过同步带d连接丝杠,所述底座上方设有小步进电机,所述底座下方设有机械爪,所述小步进电机连接机械爪,所述机械爪8侧面设有舵机a,所述轴支座a下方设有大步进电机c,所述大步进电机c通过同步带a连接至轴支座b下方,所述底座下方设有摄像头,所述移动平台底部与同步带a固定连接。
9.本实用新型优点:
10.1.可在感应到将投入垃圾时自动打开垃圾投放口,其他时间为关闭状态,避免垃圾弹出
11.2.可自主识别投入的垃圾种类并将垃圾分类储存,不用人工判断,防止投错,装错垃圾。
12.3.可以感知垃圾存储量,当某一区域内垃圾量达到一定值时,将主动提醒用户进行倾倒。
13.4.采用行架式机械臂,结构简单,运行稳定、快捷、识别准确。
附图说明
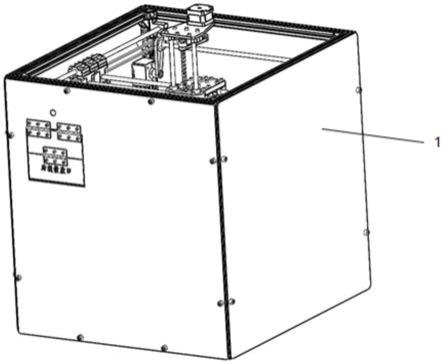
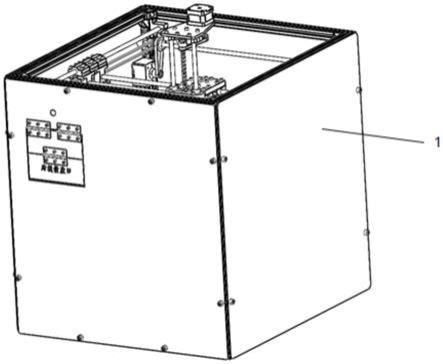
14.图1为本实用新型外观图
15.图2为本实用新型俯视图
16.图3为本实用新型内部结构图
17.图4为本实用新型内部结构图
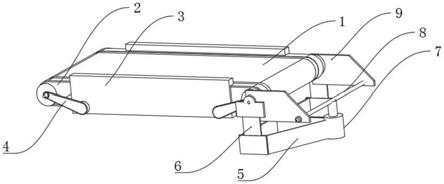
18.图5为本实用新型垃圾投入口结构图
具体实施方式
19.如图1
‑
5所示,本实用新型一种基于视觉伺服系统的智能分类垃圾桶,包括主体部分、垃圾抓取识别部分,所述主体部分包括箱体1、垃圾识别台7、垃圾分区挡板10,所述箱体1一侧设有垃圾投入口18,在箱体1内部垃圾投入口18对应位置设有垃圾识别台7,所述垃圾投入口18上方设有红外传感器2,所述箱体1内部在垃圾投入口18一旁设有舵机b30,所述舵机b30通过摇臂31连接垃圾投入口18,所述箱体1内底部设有垃圾分区挡板10将箱体1内底部分为四块区域,所述垃圾分区挡板10顶部设有距离传感器9;
20.所述垃圾抓取识别部分包括:摄像头6、光轴a4、光轴b13、直线轴承a14、直线轴承b34、直线轴承c25、直线轴承d29、轴支座a15、轴支座b19、光轴c26、光轴d32、横轴33、竖轴36、顶座37、移动平台28、底座38、机械爪8,所述箱体1以设有垃圾投入口18一面为左,在所述箱体1内部顶部左侧设有光轴a4,右侧设有光轴c26,所述光轴a4,光轴c26相互平行,所述箱体1内部略高于光轴a4,光轴c26后侧设有光轴b13,前侧设有光轴d32,所述光轴b13、光轴d32相互平行,所述光轴b13通过直线轴承a14设有两个轴支座a15,所述光轴d32上通过直线轴承b34设有两个轴支座b19,所述光轴b13上两个轴支座a15与光轴d32上两个轴支座b19通过横轴33连接,所述光轴c26底部设有大步进电机b27,所述大步进电机b27通过同步带c24连接光轴c26,所述光轴c26通过同步带b23中途连接光轴b13上的两个轴支座a15再连接至光轴a4,所述横轴33中间通过直线轴承c25连接移动平台28,所述移动平台28上方平行设有顶座37,所述移动平台28下方平行设有底座38,所述顶座37与底座38之间设有竖轴36,所述
竖轴36中间设有丝杠5,所述丝杠5穿过移动平台28一侧,所述竖轴36通过直线轴承d29连接移动平台28,所述顶座37上设有大步进电机a16,所述大步进电机a16通过同步带d17连接丝杠5,所述底座38上方设有小步进电机12,所述底座38下方设有机械爪8,所述小步进电机12连接机械爪8,所述机械爪8侧面设有舵机a11,所述轴支座a15下方设有大步进电机c22,所述大步进电机c22通过同步带a20连接至轴支座b19下方,所述底座38下方设有摄像头6,所述移动平台28底部与同步带a20固定连接。
21.所述垃圾桶的工作过程为:红外传感器2检测到一定范围内有物体时——舵机b30转动,摇臂31转动,垃圾投入口18打开——垃圾放入垃圾识别台7——移动平台28移动到垃圾垃圾识别台7上方——摄像头6开始识别垃圾种类——机械爪8工作抓取垃圾——移动平台28通过移动将垃圾投入对应储存区域,与此同时,距离传感器9用于监测每个区域的垃圾储存量,当量超过一定值时,提醒用户进行清理。
22.所述大步进电机b27带动同步带c24转动,同步带c24带动光轴c26转动,光轴c26转动通过同步带b23带动轴支座a15左右移动,轴支座a15带动横轴33左右移动,横轴33带动移动平台28左右运动,移动平台28带动机械爪8左右运动;
23.所述大步进电机c22带动同步带a20转动,同步带a20带动移动平台28做前后运动,移动平台28带动机械爪8做前后运动;
24.所述大步进电机a16通过同步带d17带动丝杠5,丝杠5带动移动平台28做上下运动,移动平台28带动机械爪8做上下运动;
25.所述机械爪8通过舵机a11进行抓取垃圾行为。
26.所述大步进电机b27、所述大步进电机c22、所述大步进电机c22、舵机a11、舵机b 30、红外传感器2、摄像头6、距离传感器9通过单片机控制。
27.本实用新型其主要适用于现阶段普通家庭对垃圾分类的需求,可通过视觉识别将投入的垃圾判定为可回收垃圾、厨余垃圾、有害垃圾和其他垃圾四类,并通过机械爪8抓取垃圾投入对应的区域内,分别进行储存。
28.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。