1.本实用新型涉及家具生产设备技术领域,特别是一种家具生产自动化切割装置。
背景技术:
2.家具是指人类维持正常生活、从事生产实践和开展社会活动必不可少的器具设施大类。家具也跟随时代的脚步不断发展创新,到如今门类繁多,用料各异,品种齐全,用途不一。是建立工作生活空间的重要基础。
3.现如今家具切割多为人工用刻度尺量尺标记,并手持切割机进行家具切割,增大了家具的尺寸误差,家具尺寸大小不一,不能保证切割质量,浪费材料,并加快了操作人员的疲劳感的产生速度,工作效率低,鉴于此,针对上述问题深入研究,遂有本案产生。
技术实现要素:
4.本实用新型的目的是为了解决上述问题,设计了一种家具生产自动化切割装置,解决了现如今家具切割多为人工用刻度尺量尺标记,并手持切割机进行家具切割,增大了家具的尺寸误差,家具尺寸大小不一,不能保证切割质量,浪费材料,并加快了操作人员的疲劳感的产生速度,工作效率低的问题。
5.实现上述目的本实用新型的技术方案为:一种家具生产自动化切割装置,包括安装台,所述安装台上设有送料结构,所述安装台上设有操作台,所述操作台上一端设有辅助移动结构,所述操作台上壁面设有调节结构,所述调节结构上设有固定结构,所述操作台侧壁面设有切割结构,所述调节结构以及切割结构上设有定位结构;
6.所述送料结构包括:第一y向直线滑轨、两个x向直线滑轨、第二y 向直线滑轨、两个z向直线滑轨、两个气动夹爪以及支撑部;
7.所述第一y向直线滑轨安装于安装台上壁面,所述安装台上壁面开设有矩形凹槽,两个所述x向直线滑轨安装于矩形凹槽内部,所述第二y向直线滑轨安装于两个所述x向直线滑轨移动端,两个所述z向直线滑轨分别安装于第一y向直线滑轨以及第二y向直线滑轨移动端上壁面,且两个所述z向直线滑轨相互对称安装,两个所述气动夹爪安装于两个所述z向直线滑轨移动端侧壁面上,所述支撑部安装于安装台以及两个所述x向直线滑轨移动端上壁面。
8.优选的,所述支撑部包括:两个第三y向直线滑轨以及两个气缸;
9.两个所述第三y向直线滑轨分别安装于安装台以及两个所述x向直线滑轨移动端上壁面,两个所述气缸安装于两个所述第三y向直线滑轨移动端上壁面。
10.优选的,所述辅助移动结构包括:第一支架、两个第一液压缸、两个第一电机、第一转动辊以及辅助转动部;
11.所述第一支架安装于操作台上壁面,两个所述第一液压缸安装于第一支架下壁面,两个所述第一电机安装于两个所述第一液压缸伸缩端,所述第一转动辊安装于两个所述第一电机驱动端,所述辅助转动部安装于操作台上壁面。
12.优选的,所述辅助转动部包括:第二支架以及第二转动辊;
13.所述第二支架安装于操作台上壁面,所述第二转动辊安装于第二支架上。
14.优选的,所述调节结构包括:若干个第一丝杆模组、若干个支撑条、若干个延长块以及若干个距离传感器;
15.若干个所述第一丝杆模组嵌装于操作台上壁面,若干个所述支撑条安装于若干个所述第一丝杆模组移动端上壁面,若干个所述延长块安装于若干个所述支撑条一侧壁面,若干个所述距离传感器嵌装于若干个所述延长块侧壁面上,若干个所述距离传感器位于若干个所述支撑中间位置。
16.优选的,所述固定结构包括:若干个延长板以及若干个第二液压缸;
17.若干个所述延长板安装于若干个所述支撑条侧壁面,若干个所述第二液压缸安装于若干个所述延长板上。
18.优选的,所述切割结构包括:两个第二丝杆模组、两个第三丝杆模组、第四丝杆模组、第二电机以及切割轮;
19.两个所述第二丝杆模组安装于操作台侧壁面,两个所述第三丝杆模组安装于两个所述第二丝杆模组移动端,所述第四丝杆模组安装于两个所述第三丝杆模组移动端,所述第二电机安装于第四丝杆模组移动端,所述切割轮安装于第二电机驱动端。
20.优选的,所述定位结构包括:若干个红外线发射器以及红外线接收器;
21.若干个所述红外线发射器安装于若干个所述延长块外侧壁面,所述红外线发射器位于支撑条中间位置,所述红外线接收器安装于两个所述第三丝杆模组的其中一个所述第三丝杆模组上。
22.优选的,所述第一转动辊以及第二转动辊上均套装有防滑橡胶套。
23.优选的,所述第二电机上设有保护罩。
24.利用本实用新型的技术方案制作的家具生产自动化切割装置,无需人工用刻度尺量尺标记,无需人工手持切割机进行墙板切割,根据操作人员需要的尺寸大小自动切割家具板材,减小了家具板材的尺寸误差,保证了切割质量,使同一批次的家具板材尺寸相同,减少浪费现象发生,减慢了操作人员的疲劳感的产生速度,提高了工作效率。
附图说明
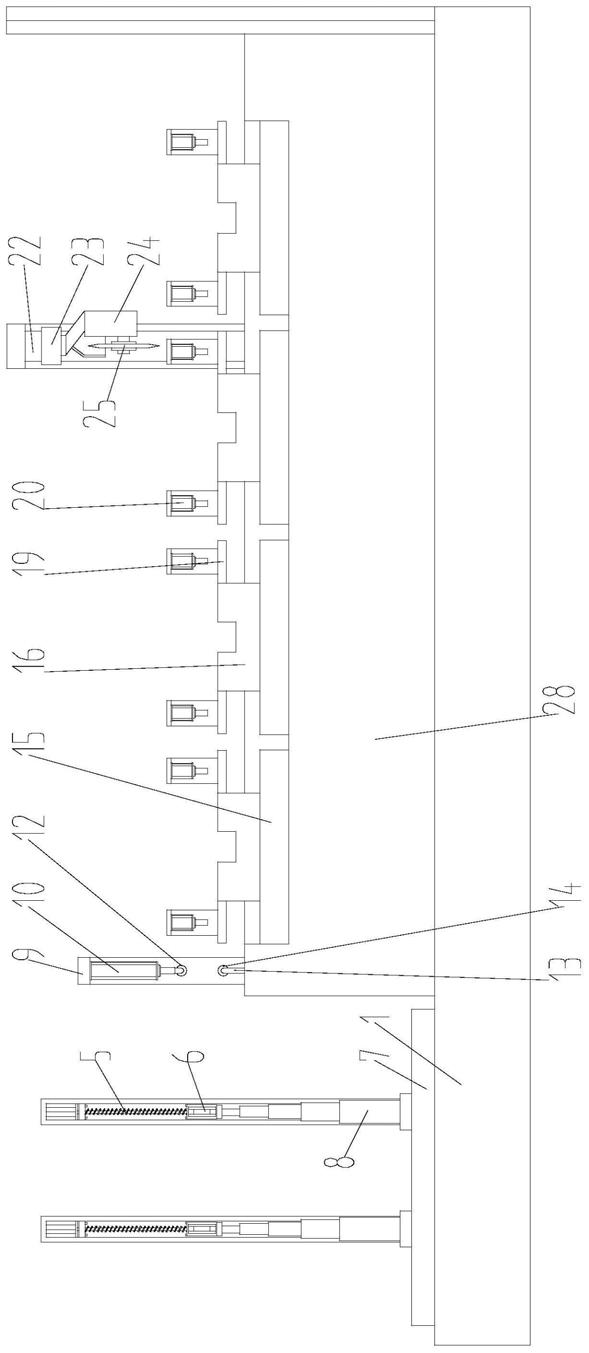
25.图1为本实用新型所述一种家具生产自动化切割装置的主视剖视结构示意图。
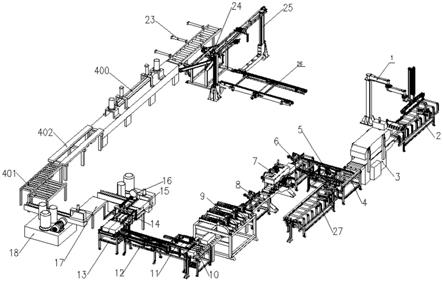
26.图2为本实用新型所述一种家具生产自动化切割装置的主视结构示意图。
27.图3为本实用新型所述一种家具生产自动化切割装置的侧视剖视结构示意图。
28.图4为本实用新型所述一种家具生产自动化切割装置的送料结构的侧视结构示意图。
29.图5为本实用新型所述一种家具生产自动化切割装置的辅助移动结构的侧视结构示意图。
30.图中:1、安装台;2、第一y向直线滑轨;3、x向直线滑轨;4、第二y向直线滑轨;5、z向直线滑轨;6、气动夹爪;7、第三y向直线滑轨;8、气缸;9、第一支架;10、第一液压缸;11、第一电机;12、第一转动辊;13、第二支架;14、第二转动辊;15、第一丝杆模组;16、支撑条;17、延长块;18、距离传感器;19、延长板;20、第二液压缸;21、第二丝杆模组;22、第三丝杆模组;
23、第四丝杆模组;24、第二电机; 25、切割轮;26、红外线发射器;27、红外线接收器;28、操作台。
具体实施方式
31.下面结合附图对本实用新型进行具体描述,如图1
‑
5所示,一种家具生产自动化切割装置。
32.通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
33.实施例:
34.实现上述目的本实用新型的技术方案为:一种家具生产自动化切割装置,包括安装台,安装台上设有送料结构,安装台上设有操作台28,操作台28上一端设有辅助移动结构,操作台28上壁面设有调节结构,调节结构上设有固定结构,操作台28侧壁面设有切割结构,调节结构以及切割结构上设有定位结构;
35.在具体实施过程中,送料结构可优选采用以下结构,其包括:第一y 向直线滑轨、两个x向直线滑轨、第二y向直线滑轨、两个z向直线滑轨、两个气动夹爪以及支撑部;第一y向直线滑轨安装于安装台上壁面,安装台上壁面开设有矩形凹槽,两个x向直线滑轨安装于矩形凹槽内部,第二 y向直线滑轨安装于两个x向直线滑轨移动端,两个z向直线滑轨分别安装于第一y向直线滑轨以及第二y向直线滑轨移动端上壁面,且两个z向直线滑轨相互对称安装,两个气动夹爪安装于两个z向直线滑轨移动端侧壁面上,支撑部安装于安装台以及两个x向直线滑轨移动端上壁面。
36.在具体实施过程中,支撑部可优选采用以下结构,其包括:两个第三 y向直线滑轨以及两个气缸;两个第三y向直线滑轨分别安装于安装台以及两个x向直线滑轨移动端上壁面,两个气缸安装于两个第三y向直线滑轨移动端上壁面。
37.在具体实施过程中,辅助移动结构可优选采用以下结构,其包括:第一支架9、两个第一液压缸10、两个第一电机11、第一转动辊12以及辅助转动部;第一支架9安装于操作台28上壁面,两个第一液压缸10安装于第一支架9下壁面,两个第一电机11安装于两个第一液压缸10伸缩端,第一转动辊12安装于两个第一电机11驱动端,所述辅助转动部安装于操作台28上壁面。
38.在具体实施过程中,辅助转动部可优选采用以下结构,其包括:第二支架13以及第二转动辊14;第二支架13安装于操作台28上壁面,第二转动辊14安装于第二支架13上。
39.在具体实施过程中,调节结构可优选采用以下结构,其包括:若干个第一丝杆模组15、若干个支撑条16、若干个延长块17以及若干个距离传感器18;若干个第一丝杆模组15嵌装于操作台28上壁面,若干个支撑条16安装于若干个第一丝杆模组15移动端上壁面,若干个延长块17安装于若干个支撑条16一侧壁面,若干个距离传感器18嵌装于若干个延长块17侧壁面上,若干个距离传感器18位于若干个支撑中间位置。
40.在具体实施过程中,固定结构可优选采用以下结构,其包括:若干个延长板19以及若干个第二液压缸20;若干个延长板19安装于若干个支撑条16侧壁面,若干个第二液压缸
20安装于若干个延长板19上。
41.在具体实施过程中,切割结构可优选采用以下结构,其包括:两个第二丝杆模组21、两个第三丝杆模组22、第四丝杆模组23、第二电机24 以及切割轮25;两个第二丝杆模组21安装于操作台28侧壁面,两个第三丝杆模组22安装于两个第二丝杆模组21移动端,第四丝杆模组23安装于两个第三丝杆模组22移动端,第二电机24安装于第四丝杆模组23 移动端,切割轮25安装于第二电机24驱动端。
42.在具体实施过程中,定位结构可优选采用以下结构,其包括:若干个红外线发射器26以及红外线接收器27;若干个红外线发射器26安装于若干个延长块17外侧壁面,红外线发射器26位于支撑条16中间位置,红外线接收器27安装于两个第三丝杆模组22的其中一个第三丝杆模组 22上。
43.其中需要说明的是:若干个距离传感器18呈阶梯状排列,操作台28 一端设有挡板,若干个距离传感器18检测若干个延长块17之间的距离,通过控制若干个第一丝杆模组15的工作使距离传感器18检测的距离到达设定值,随后使用人员控制第一y向直线滑轨以及第二y向直线滑轨组工作,使两个气动夹爪对准木质板材,随后控制两个两个x向直线滑轨工作,使两个气动夹爪靠近,两个气动夹爪夹住木质板材,随后控制两个z向直线滑轨工作,通过两个气动夹爪带动木质板材抬高,与此同时两个第三y 向直线滑轨工作,两个第三y向直线滑轨移动端带动两个气缸移动,两个气缸伸长,对两个z向直线滑轨移动端起到支撑作用,随后第一y向直线滑轨、第二y向直线滑轨组与两个第三y向直线滑轨共同工作,带动木质板材移动至操作台28上,木质板材移动至第一转动辊12与第二转动辊 14之间后,两个第一液压缸10伸长,两个第一电机11工作,带动第一转动辊12转动,辅助板材移动,木质板材一端贴合挡板,随后若干个第二液压缸20伸长,压紧木质板材,随后两个第二丝杆模组21工作,带动两个第三丝杆模组22工作,当红外线发射器26对应红外线接收器27时,两个第二丝杆模组21停止工作,两个第三丝杆模组22、第四丝杆模组23、第二电机24工作,切割轮25对板材进行切割。
44.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。