1.本发明涉及新能源汽车底盘智能控制技术领域,具体来说是一种分布式驱动汽车牵引力控制方法。
背景技术:
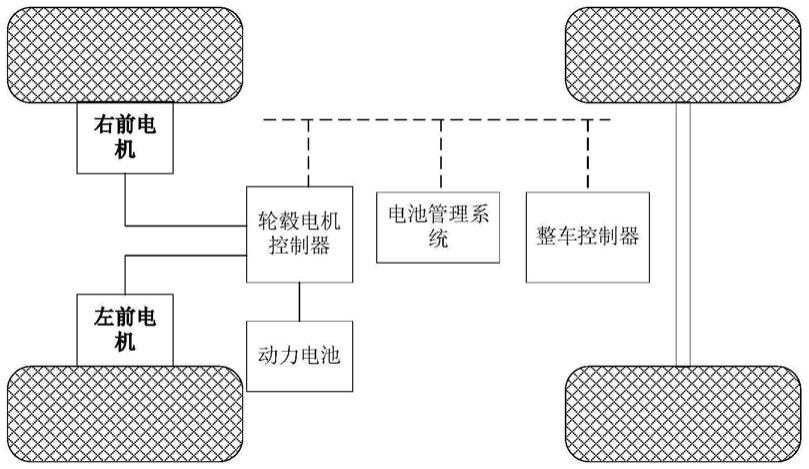
2.目前,针对轮毂电机扭矩可以迅速精确控制、容易获取的特点,需要开发出相应的分布式整车动力学控制策略。牵引力控制系统可有效降低驱动轮在低附着路面情况下起步、加速的轮胎打滑程度,提高整车的动力性和稳定性。分布式驱动汽车,不同于传统的燃油汽车和新能源汽车,如图1所示,其取消了复杂的机械传动结构,直接将电机集成在轮辋里,由动力电池进行电能的输送,电池管理系统对动力电池的状态、使用情况进行管理,整车控制器进行整车层面的控制,其中包括动力学控制。
3.现有技术中所提出的牵引力控制方法存在工况适应性差、算法复杂带来的运算量大等缺点。专利公布号cn110126640a提出了一种基于路面自适应的四轮驱动电动车变参数防滑控制系统。其基本原理是:通过路面附着系数估计来获取最优滑转率,从而换算成目标轮速,再通过变参数pid来进行目标扭矩的计算。该方法提出的路面附着系数识别方法需要基于复杂的burkhardt轮胎模型,难以在实车上进行应用,采用的变参数pid无法精确地跟踪轮速和实现精确的滑转率控制,工况适应性和鲁棒性较差,此外,该方法没有针对牵引力控制介入和退出时的扭矩突变进行处理,影响了驾乘的舒适性。
技术实现要素:
4.本发明的目的是为了解决现有技术中牵引力控制方法无法满足实际使用需要的缺陷,提供一种分布式驱动汽车牵引力控制方法来解决上述问题。
5.为了实现上述目的,本发明的技术方案如下:
6.一种分布式驱动汽车牵引力控制方法,包括以下步骤:
7.分布式驱动汽车实时数据的获取和预处理:获取分布式驱动汽车的纵向加速度、驱动轮转矩以及从轮轮速、驱动轮轮速的实时数据,并根据分布式驱动汽车实时数据计算利用附着系数;
8.当前路面最优滑转率的估算:根据驱动轮的实时滑转率和利用附着系数估算出当前路面的最优滑转率;
9.牵引力控制系统介入条件的判断:判断是否满足介入条件,若满足介入条件则牵引力控制系统介入,且介入时进行扭矩的过渡处理;
10.目标扭矩的计算及扭矩判断:目标扭矩进行计算:对驱动轮采用滑模控制的方法进行最优滑转率的控制,得出目标扭矩;扭矩判断:同时获取驾驶员请求扭矩,根据请求扭矩与目标扭矩对比进行扭矩输出;当目标扭矩大于请求扭矩时,输出请求扭矩,否则输出目标扭矩;
11.牵引力控制系统退出条件的判断:判断是否满足牵引力控制系统退出条件,若满
足则退出牵引力控制,则退出时进行扭矩的过渡处理;其中,牵引力控制系统退出条件为满足以下任意一个条件:当检测到实时滑转率低于阈值且持续时间超过计数模块的计数阈值;驾驶员踩下制动踏板;车速低于阈值v0;
12.左右轮扭矩协调的处理:根据车速的不同和左右轮扭矩的不同进行扭矩的输出。
13.所述当前路面最优滑转率的估算包括以下步骤:
14.根据从动轮轮速计算车速
15.从而计算出驱动轮的实时滑转率
16.其中,ω1和ω2分别为后轴两从动轮的轮速,r为轮胎的滚动半径,ω
i
,i=1、2,分别表示左前轮、右前轮的轮速;
17.根据牛顿运动定律和刚体转动微分方程,得到:
[0018][0019][0020]
其中,f
z
为驱动轮垂直载荷,m为整车整备质量,b为质心到后轴的距离,t
m
为轮毂电机驱动转矩,i
w
为驱动轮转动惯量,α为驱动轮角加速度,f
x
为地面切向力,a
x
为整车的纵向加速度,h
g
为质心高度,g为重力加速度,l为轴距;
[0021]
从而计算得到利用附着系数
[0022]
将实时滑转率和利用附着系数分别对时间t求导得:
[0023][0024]
当时,
[0025]
当时,认为出现了的情况,且上一时刻的滑转率λ
(t
‑
1)
在0.05
‑
0.2这个区间范围内时,取λ
(t
‑
1)
作为最优滑转率λ
d
,否则取0.15作为最优滑转率。
[0026]
所述牵引力控制系统介入条件的判断包括以下步骤:
[0027]
设定牵引力控制系统的介入条件:设定计数模块,控制器每个运算周期内当检测到实时滑转率大于阈值时,计数模块加1,当计数值超过设定的计数阈值时且未检测到制动踏板信号,车速大于阈值v
t
时,牵引力控制系统介入,否则计数值清零,重新开始计数;
[0028]
牵引力控制系统介入时,记为t0时刻,获取此时的驾驶员请求扭矩trqcmd,设置扭矩介入/退出系数gain,经过时间t,即t0 t时刻,扭矩介入系数gain从0过渡到1,完成从驾驶员请求扭矩到目标扭矩输出扭矩的过渡;
[0029]
设定牵引力控制系统退出时,记为t时刻,获取此时的目标扭矩t
tcs
,经过时间t1,
即t t1时刻,扭矩退出系数gain从1过渡到0,完成从目标扭矩到驾驶员请求扭矩的过渡,退出后直接响应驾驶员请求扭矩;
[0030]
其中,介入和退出时过渡扭矩的计算如下所示:
[0031]
t=gain*t
tcs
(gain
‑
1)*trqcmd,
[0032][0033]
其中,t
tcs
为目标扭矩,tstep为扭矩系数步长;
[0034]
设定介入时过渡时间t:控制器的算法运行周期记为t
s
,则过渡时间其中tstep根据实际情况进行标定;退出时过渡时间t1的设定与介入时过渡时间t的设定相同。
[0035]
所述对目标扭矩进行计算包括以下步骤:
[0036]
计算实际滑转率和最优滑转率之间的误差e为:
[0037]
e=λ
‑
λ
d
[0038]
采用滑模控制算法来计算目标扭矩,选取滑模面s=e=λ
‑
λ
d
,采用的指数趋近律如下:
[0039][0040]
其中,sgn()代表符号函数,ε为控制增益,k为根据扰动选取的值;
[0041]
从而得目标扭矩t
tcs
如下:
[0042][0043]
为减弱实际应用中的抖振问题,用饱和函数sat(s)代替符号函数sgn(s):
[0044][0045]
其中,
△
为边界层宽度,
[0046]
此时目标扭矩
[0047]
所述左右轮扭矩协调的处理包括以下步骤:
[0048]
当车速低于设定车速v时,不采用扭矩协调,驱动轮输出各自的目标扭矩;
[0049]
当车速大于设定车速v时,采用低选控制,即选择目标扭矩较小的一侧扭矩作为输出扭矩。
[0050]
有益效果
[0051]
本发明的一种分布式驱动汽车牵引力控制方法,与现有技术相比有效解决了牵引力控制中存在的工况适应性差、算法复杂、滑转率目标跟随效果差等问题,并提高了整车在低附着路面上的动力性和稳定性,同时保证了牵引力控制介入和退出时驾乘的舒适性。
附图说明
[0052]
图1为现有技术中分布式驱动汽车控制原理框图;
[0053]
图2为本发明的方法顺序图;
[0054]
图3为本发明所涉及的控制原理图。
具体实施方式
[0055]
为使对本发明的结构特征及所达成的功效有更进一步的了解与认识,用以较佳的实施例及附图配合详细的说明,说明如下:
[0056]
如图2和图3所示,本发明所述的一种分布式驱动汽车牵引力控制方法,包括以下步骤:
[0057]
第一步,分布式驱动汽车实时数据的获取和预处理:获取分布式驱动汽车的纵向加速度、驱动轮转矩以及从轮轮速、驱动轮轮速的实时数据,并根据分布式驱动汽车实时数据计算利用附着系数。
[0058]
第二步,当前路面最优滑转率的估算:根据驱动轮的实时滑转率和利用附着系数估算出当前路面的最优滑转率。其具体步骤如下:
[0059]
(1)根据从动轮轮速计算车速
[0060]
从而计算出驱动轮的实时滑转率
[0061]
其中,ω1和ω2分别为后轴两从动轮的轮速,r为轮胎的滚动半径,ω
i
,i=1、2,分别表示左前轮、右前轮的轮速;
[0062]
(2)根据牛顿运动定律和刚体转动微分方程,得到:
[0063][0064][0065]
其中,f
z
为驱动轮垂直载荷,m为整车整备质量,b为质心到后轴的距离,t
m
为轮毂电机驱动转矩,i
w
为驱动轮转动惯量,α为驱动轮角加速度,f
x
为地面切向力,a
x
为整车的纵向加速度,h
g
为质心高度,g为重力加速度,l为轴距;
[0066]
从而计算得到利用附着系数
[0067]
将实时滑转率和利用附着系数分别对时间t求导得:
[0068][0069]
当时,
[0070]
当时,认为出现了的情况,
且上一时刻的滑转率λ
(t
‑
1)
在0.05
‑
0.2这个区间范围内时,取λ
(t
‑
1)
作为最优滑转率λ
d
,否则取0.15作为最优滑转率。
[0071]
第三步,牵引力控制系统介入条件的判断:判断是否满足介入条件,若满足介入条件则牵引力控制系统介入,且介入时进行扭矩的过渡处理。进行介入和退出的扭矩过渡处理,可有效防止介入和退出时产生的扭矩突变,提高驾乘的舒适性,同时能够减轻对电机系统的冲击。
[0072]
其具体步骤如下:
[0073]
(1)设定牵引力控制系统的介入条件:设定计数模块,控制器每个运算周期内当检测到实时滑转率大于阈值时,计数模块加1,当计数值超过设定的计数阈值时且未检测到制动踏板信号,车速大于阈值v
t
时,牵引力控制系统介入,否则计数值清零,重新开始计数。实际应用中,若满足了介入条件,则介入牵引力控制系统。
[0074]
(2)牵引力控制系统介入时,记为t0时刻,获取此时的驾驶员请求扭矩trqcmd,设置扭矩介入/退出系数gain,经过时间t,即t0 t时刻,扭矩介入系数gain从0过渡到1,完成从驾驶员请求扭矩到目标扭矩输出扭矩的过渡;
[0075]
(3)设定牵引力控制系统退出时,记为t时刻,获取此时的目标扭矩t
tcs
,经过时间t1,即t t1时刻,扭矩退出系数gain从1过渡到0,完成从目标扭矩到驾驶员请求扭矩的过渡,退出后直接响应驾驶员请求扭矩;
[0076]
其中,介入和退出时过渡扭矩的计算如下所示:
[0077]
t=gain*t
tcs
(gain
‑
1)*trqcmd,
[0078][0079]
其中,t
tcs
为目标扭矩,tstep为扭矩系数步长。
[0080]
(4)设定介入时过渡时间t:控制器的算法运行周期记为t
s
,则过渡时间其中tstep根据实际情况进行标定;退出时过渡时间t1的设定与介入时过渡时间t的设定相同。
[0081]
第四步,目标扭矩的计算及扭矩判断:目标扭矩进行计算:对驱动轮采用滑模控制的方法进行最优滑转率的控制,得出目标扭矩;扭矩判断:同时获取驾驶员请求扭矩,根据请求扭矩与目标扭矩对比进行扭矩输出;当目标扭矩大于请求扭矩时,输出请求扭矩,否则输出目标扭矩。采用滑模控制的方法能够根据最优滑转率的目标精确的控制滑转率,且工况适应性好,鲁棒性高,同时采用饱和函数代替符号函数能够有效抑制运用时的抖振情况。
[0082]
其中,对目标扭矩进行计算包括以下步骤:
[0083]
(1)计算实际滑转率和最优滑转率之间的误差e为:
[0084]
e=λ
‑
λ
d
[0085]
采用滑模控制算法来计算目标扭矩,选取滑模面s=e=λ
‑
λ
d
,采用的指数趋近律如下:
[0086][0087]
其中,sgn()代表符号函数,ε为控制增益,k为根据扰动选取的值;
[0088]
从而得目标扭矩t
tcs
如下:
[0089][0090]
(2)为减弱实际应用中的抖振问题,用饱和函数sat(s)代替符号函数sgn(s):
[0091][0092]
其中
△
为边界层宽度,
[0093]
此时目标扭矩
[0094]
第五步,牵引力控制系统退出条件的判断:判断是否满足牵引力控制系统退出条件,若满足则退出牵引力控制,则退出时进行扭矩的过渡处理。
[0095]
牵引力控制系统退出条件为满足以下任意一个条件:
[0096]
(1)当检测到实时滑转率低于阈值且持续时间超过计数模块的计数阈值;(2)驾驶员踩下制动踏板;(3)车速低于阈值v0。
[0097]
第六步,左右轮扭矩协调的处理:根据车速的不同和左右轮扭矩的不同进行扭矩的输出。为保证低速下的动力性,同时考虑到驾驶员可以通过转动方向盘来自行处理低速工况下的车辆稳定性问题。
[0098]
(1)当车速低于设定车速v时,不采用扭矩协调,驱动轮输出各自的目标扭矩;
[0099]
(2)当车速大于设定车速v时,采用低选控制,即选择目标扭矩较小的一侧扭矩作为输出扭矩。
[0100]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。