1.本发明涉及机械手领域,尤其是涉及到一种热加工用机械手。
背景技术:
2.随着工业机械化和自动化的发展,机械手已经广泛应用到各个行业,特别是在热加工行业中对于机械手的需求尤为重视,因热加工作业的物件重、形状复杂、环境温度高等因素,用机械手取出产品,可节省人工,也由于热加工物件重的原因,机械手多使用硬轨配合加工,因硬轨滑动接触面较大,刚性强,稳定性高,但是由于接触面大,使得磨擦阻力也较大,磨损较快,移动速度受限,同时易产生爬行现象等缺陷,因此需要研制一种热加工用机械手,以此来解决现有热加工用机械手移动速度受限,同时易产生爬行现象的问题。
3.本
技术实现要素:
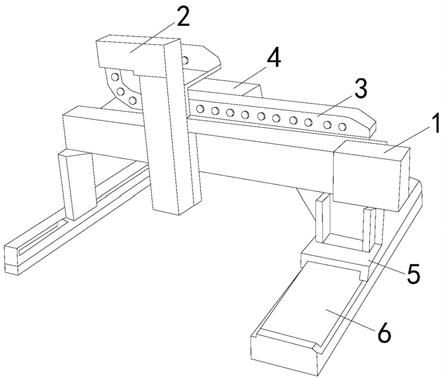
4.针对现有技术的不足,本发明是通过如下的技术方案来实现:一种热加工用机械手,其结构包括桁架、梁架、履带、焊接头、内三角轨板、导轨板,所述的桁架联接梁架,所述的履带装设于桁架与梁架上且三者相互连接,所述的焊接头连接于履带,所述的内三角轨板设于桁架底部且嵌合连接导轨板,桁架与梁架均作为机械手的支架结构进行使用,并且其内部具有供履带传动的驱动结构用于联动履带使其在连接桁架与梁架的同时带动焊接头转移位置,履带用于控制焊接头的位置以实现焊接头在工件上的精准移动,利用内三角轨板与导轨板相互嵌合使二者形成机械手的移动轨道结构,其中导轨板处于不动状态下其内部配备有联动内三角轨板横移的润滑驱动结构。
5.作为本技术方案的进一步优化,所述的内三角轨板包括有挡板、平衡块、阻尼柱、缓冲胶块、支撑滚轮,所述的挡板内两侧均贴合连接平衡块,所述的平衡块之间设有阻尼柱且阻尼柱底部连接缓冲胶块,所述的缓冲胶块侧边均设有支撑滚轮且二者相互间隔连接,挡板呈双向对立设置形成内三角轨板的框架结构,同时其内壁与平衡块相对一侧相互吻合,平衡块嵌合于挡板内,在受到由上至下的挤压作用力时其结构变形会缩小与挡板的间距,从而反向支撑平衡块以减小平衡块的下压力,阻尼柱采用阻尼元件制成类似柱形结构,其侧边贴合平衡块且在平衡块与其相互接触的同时会依靠表面的阻尼面降低平衡块的下滑速度,从而减小平衡块在下压时对于底部结构的高强度冲击压力,缓冲胶块采用柔性软胶材料制成,其主要用于支撑阻尼柱并反向支撑防止其结构变形倾斜,支撑滚轮则是用于支撑起顶端的平衡块,增强结构刚性。
6.作为本技术方案的进一步优化,所述的平衡块包括有气包滑块、输气管、顶囊、嵌合槽块,所述的气包滑块上端设有输气管且端面位置连通顶囊,所述的嵌合槽块设于气包滑块一侧且二者为一体化结构,气包滑块采用气囊材料结合板块构成,在气包滑块倾斜下滑的同时内部的输气管开始输气,在气包滑块接收输气管提供初始气压对其进行充气的情况下,气包滑块上的顶囊膨胀变大并且高度会超过挡板,从而与机械手相接触并支撑其向下的压力。
7.作为本技术方案的进一步优化,所述的支撑滚轮包括六边形架、顶角推杆、主动
轴、滑杆、三角轮,所述的六边形架顶端对角位置分别设有顶角推杆,所述的主动轴设于六边形架两端且连接滑杆一端,所述的三角轮设于六边形架底部位置,六边形架为支撑滚轮的框架结构,通过两侧的顶角推杆内部的弹簧构件能够形成交叉角度的支撑力,主动轴在驱动后会带动滑杆在导轨板的侧面滑槽进行横移动作,三角轮则是用于内三角轨板的自行移动,并且其采用类三角构造能够形成稳固的支撑力以防止结构在受到下压力的挤压时变形。
8.作为本技术方案的进一步优化,所述的三角轮包括有从动轴、轮套、降压轮、辅助轮、变形囊、皮带,所述的从动轴外圈嵌合连接轮套,所述的降压轮间隔设于轮套底部且其侧边均设有辅助轮并通过变形囊与辅助轮相互贴合,所述的皮带依次连接轮套、降压轮与辅助轮,从动轴提供原始动能去动轮套旋转,在轮套旋转的基础下外层的皮带会联动降压轮与辅助轮滚动,一旦顶端压力过大造成轮套高度下降与降压轮发生接触,降压轮在变形囊的包裹下轻微下沉改变其自身高度,并且联动轮套降低一定高度以避免长时间与顶端的压力接触,从而大幅度降低压力对结构的挤压强度。
9.有益效果
10.本发明一种热加工用机械手,设计合理,功能性强,具有以下有益效果:
11.本发明首先利用平衡块特性降低顶端对内三角轨板施加的压力,在受到由上至下的挤压作用力时其结构变形会缩小与挡板的间距,从而反向支撑平衡块以减小平衡块的下压力,阻尼柱其侧边贴合平衡块且在平衡块与其相互接触的同时会依靠表面的阻尼面降低平衡块的下滑速度,从而减小平衡块在下压时对于底部结构的高强度冲击压力,;
12.本发明通过轮套旋转结合外层的皮带联动降压轮与辅助轮滚动,一旦顶端压力过大造成轮套高度下降与降压轮发生接触,降压轮在变形囊的包裹下轻微下沉改变其自身高度,并且联动轮套降低一定高度以避免长时间与顶端的压力接触,从而大幅度降低压力对结构的挤压强度,增强机械手的移动速度,避免受压阻碍结构正常运转产生爬行,从而解决现有热加工用机械手移动速度受限,同时易产生爬行现象的问题。
附图说明
13.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
14.图1为本发明一种热加工用机械手的侧视结构示意图;
15.图2为本发明的内三角轨板结构侧剖图;
16.图3为本发明的平衡块结构侧剖图;
17.图4为本发明的支撑滚轮结构侧剖图;
18.图5为本发明的三角轮结构侧剖图;
19.图中:桁架
‑
1、梁架
‑
2、履带
‑
3、焊接头
‑
4、内三角轨板
‑
5、导轨板
‑
6、挡板
‑
50、平衡块
‑
51、阻尼柱
‑
52、缓冲胶块
‑
53、支撑滚轮
‑
54、气包滑块
‑
510、输气管
‑
511、顶囊
‑
512、嵌合槽块
‑
513、六边形架
‑
540、顶角推杆
‑
541、主动轴
‑
542、滑杆
‑
543、三角轮
‑
544、从动轴
‑
5440、轮套
‑
5441、降压轮
‑
5442、辅助轮
‑
5443、变形囊
‑
5444、皮带
‑
5445。
具体实施方式
20.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式以及附图说明,进一步阐述本发明的优选实施方案。
21.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
22.实施例1
23.请参阅图1
‑
3,本发明提供一种热加工用机械手的具体实施方式:
24.请参阅图1,一种热加工用机械手,其结构包括桁架1、梁架2、履带3、焊接头4、内三角轨板5、导轨板6,所述的桁架1联接梁架2,所述的履带3装设于桁架1与梁架2上且三者相互连接,所述的焊接头4连接于履带3,所述的内三角轨板5设于桁架1底部且嵌合连接导轨板6,桁架1与梁架2均作为机械手的支架结构进行使用,并且其内部具有供履带3传动的驱动结构用于联动履带3使其在连接桁架1与梁架的同时带动焊接头4转移位置,履带3用于控制焊接头4的位置以实现焊接头4在工件上的精准移动,利用内三角轨板5与导轨板6相互嵌合使二者形成机械手的移动轨道结构,其中导轨板6处于不动状态下其内部配备有联动内三角轨板5横移的润滑驱动结构。
25.请参阅图2,所述的内三角轨板5包括有挡板50、平衡块51、阻尼柱52、缓冲胶块53、支撑滚轮54,所述的挡板50内两侧均贴合连接平衡块51,所述的平衡块51之间设有阻尼柱52且阻尼柱52底部连接缓冲胶块53,所述的缓冲胶块53侧边均设有支撑滚轮54且二者相互间隔连接,挡板50呈双向对立设置形成内三角轨板5的框架结构,同时其内壁与平衡块51相对一侧相互吻合,平衡块51嵌合于挡板50内,在受到由上至下的挤压作用力时其结构变形会缩小与挡板50的间距,从而反向支撑平衡块51以减小平衡块51的下压力,阻尼柱52采用阻尼元件制成类似柱形结构,其侧边贴合平衡块51且在平衡块51与其相互接触的同时会依靠表面的阻尼面降低平衡块51的下滑速度,从而减小平衡块51在下压时对于底部结构的高强度冲击压力,缓冲胶块53采用柔性软胶材料制成,其主要用于支撑阻尼柱52并反向支撑防止其结构变形倾斜,支撑滚轮54则是用于支撑起顶端的平衡块51,增强结构刚性。
26.请参阅图3,所述的平衡块51包括有气包滑块510、输气管511、顶囊512、嵌合槽块513,所述的气包滑块510上端设有输气管511且端面位置连通顶囊512,所述的嵌合槽块513设于气包滑块510一侧且二者为一体化结构,气包滑块510采用气囊材料结合板块构成,在气包滑块510倾斜下滑的同时内部的输气管511开始输气,在气包滑块510接收输气管511提供初始气压对其进行充气的情况下,气包滑块510上的顶囊512膨胀变大并且高度会超过挡板50,从而与机械手相接触并支撑其向下的压力。
27.实施例2
28.请参阅图1
‑
5,本发明提供一种热加工用机械手的具体实施方式:
29.请参阅图1,一种热加工用机械手,其结构包括桁架1、梁架2、履带3、焊接头4、内三角轨板5、导轨板6,所述的桁架1联接梁架2,所述的履带3装设于桁架1与梁架2上且三者相互连接,所述的焊接头4连接于履带3,所述的内三角轨板5设于桁架1底部且嵌合连接导轨板6,桁架1与梁架2均作为机械手的支架结构进行使用,并且其内部具有供履带3传动的驱
动结构用于联动履带3使其在连接桁架1与梁架的同时带动焊接头4转移位置,履带3用于控制焊接头4的位置以实现焊接头4在工件上的精准移动,利用内三角轨板5与导轨板6相互嵌合使二者形成机械手的移动轨道结构,其中导轨板6处于不动状态下其内部配备有联动内三角轨板5横移的润滑驱动结构。
30.请参阅图2,所述的内三角轨板5包括有挡板50、平衡块51、阻尼柱52、缓冲胶块53、支撑滚轮54,所述的挡板50内两侧均贴合连接平衡块51,所述的平衡块51之间设有阻尼柱52且阻尼柱52底部连接缓冲胶块53,所述的缓冲胶块53侧边均设有支撑滚轮54且二者相互间隔连接,挡板50呈双向对立设置形成内三角轨板5的框架结构,同时其内壁与平衡块51相对一侧相互吻合,平衡块51嵌合于挡板50内,在受到由上至下的挤压作用力时其结构变形会缩小与挡板50的间距,从而反向支撑平衡块51以减小平衡块51的下压力,阻尼柱52采用阻尼元件制成类似柱形结构,其侧边贴合平衡块51且在平衡块51与其相互接触的同时会依靠表面的阻尼面降低平衡块51的下滑速度,从而减小平衡块51在下压时对于底部结构的高强度冲击压力,缓冲胶块53采用柔性软胶材料制成,其主要用于支撑阻尼柱52并反向支撑防止其结构变形倾斜,支撑滚轮54则是用于支撑起顶端的平衡块51,增强结构刚性。
31.请参阅图3,所述的平衡块51包括有气包滑块510、输气管511、顶囊512、嵌合槽块513,所述的气包滑块510上端设有输气管511且端面位置连通顶囊512,所述的嵌合槽块513设于气包滑块510一侧且二者为一体化结构,气包滑块510采用气囊材料结合板块构成,在气包滑块510倾斜下滑的同时内部的输气管511开始输气,在气包滑块510接收输气管511提供初始气压对其进行充气的情况下,气包滑块510上的顶囊512膨胀变大并且高度会超过挡板50,从而与机械手相接触并支撑其向下的压力。
32.请参阅图4,所述的支撑滚轮54包括六边形架540、顶角推杆541、主动轴542、滑杆543、三角轮544,所述的六边形架540顶端对角位置分别设有顶角推杆541,所述的主动轴542设于六边形架540两端且连接滑杆543一端,所述的三角轮544设于六边形架540底部位置,六边形架540为支撑滚轮54的框架结构,通过两侧的顶角推杆541内部的弹簧构件能够形成交叉角度的支撑力,主动轴542在驱动后会带动滑杆543在导轨板6的侧面滑槽进行横移动作,三角轮544则是用于内三角轨板5的自行移动,并且其采用类三角构造能够形成稳固的支撑力以防止结构在受到下压力的挤压时变形。
33.请参阅图5,所述的三角轮544包括有从动轴5440、轮套5441、降压轮5442、辅助轮5443、变形囊5444、皮带5445,所述的从动轴5440外圈嵌合连接轮套5441,所述的降压轮5442间隔设于轮套5441底部且其侧边均设有辅助轮5443并通过变形囊5444与辅助轮5443相互贴合,所述的皮带5445依次连接轮套5441、降压轮5442与辅助轮5443,从动轴5440提供原始动能去动轮套5441旋转,在轮套5440旋转的基础下外层的皮带会联动降压轮5442与辅助轮5443滚动,一旦顶端压力过大造成轮套5441高度下降与降压轮5442发生接触,降压轮5442在变形囊5444的包裹下轻微下沉改变其自身高度,并且联动轮套5441降低一定高度以避免长时间与顶端的压力接触,从而大幅度降低压力对结构的挤压强度。
34.其具体实现原理如下:
35.利用内三角轨板5与导轨板6相互嵌合使二者形成机械手的移动轨道结构,在受到由上至下的挤压作用力时其结构变形会缩小与挡板50的间距,从而反向支撑平衡块51以减小平衡块51的下压力,在气包滑块510接收输气管511提供初始气压对其进行充气的情况
下,气包滑块510上的顶囊512膨胀变大并且高度会超过挡板50,降压轮5442在变形囊5444的包裹下轻微下沉改变其自身高度,增强机械手的移动速度,避免受压阻碍结构正常运转产生爬行,从而解决现有热加工用机械手移动速度受限,同时易产生爬行现象的问题。
36.以上显示和描述了本发明的基本原理、主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神或基本特征的前提下,不仅能够以其他的具体形式实现本发明,还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围,因此本发明要求保护范围由所附的权利要求书及其等同物界定,而不是上述说明限定。
37.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。