1.本发明涉及半自动物流转运领域,具体涉及一种吊装夹紧装置。
背景技术:
2.在国内多数生产车间,对工件或零部件的夹紧是生产流水线必不可少的环节,目前,工件或零部件所在的托盘通过人工方式或简易吊钩形式进行夹紧实现不同工位之间的转运,该操作夹持效率低下,且操作方式对于不同外形尺寸的托盘适应范围较差,不具备通用性。
技术实现要素:
3.本发明的目的在于提供一种吊装夹紧装置,可气动实现对托盘的快速准确夹持,提高托盘不同外形尺寸的适用范围,同时能够确保托盘夹持的安全行。
4.实现本发明目的的技术方案为:一种吊装夹紧装置,包括框架、第一支架、第二支架、y轴方向调整机构、x轴方向调整夹持机构和气路控制系统,第一支架和第二支架分别通过y轴方向调整机构与框架两侧连接,可进行y方向移动;第一支架和第二支架的左右两侧均设有x轴方向调整夹持机构,x轴方向调整夹持机构可沿第一支架或第二支架移动,气路控制系统用于控制x轴方向调整夹持机构的移动,其包括气路以及安装在气路上的节流阀、气动二联件、按钮开关阀、拨动开关阀、三位五通阀和4个气缸;其中:
5.所述节流阀安装在气路入口端,用于调节气源入口的压力值;
6.所述气动二联件用于显示气压压力值;
7.所述三位五通阀用于控制气缸,压缩空气通过气动二联件后分为两路,一路经过三位五通阀作用于气缸,构成动作回路;另一路经过按钮开关阀、拨动开关阀成为三位五通阀的先导控制回路,当拨动开关阀右位接通时,三位五通阀左位接通,4个气缸的伸缩杆均缩回;按钮开关阀上位接通且拨动开关阀左位接通,三位五通阀右位接通,4个气缸的伸缩杆均伸出;
8.所述4个气缸分别与4个控制x轴方向调整夹持机构对应连接。
9.本发明与现有技术相比,其显著效果为:(1)本发明通过定位机构、y轴方向调整机构和x轴方向调整夹持机构对托盘预定位、位置调整实现快速准确地夹持动作;(2)本发明通过调整定位销在不同托盘配置孔对应的位置实现不同外形尺寸托盘的扩展适用;(3)本发明的气路控制系统设计充分考虑操作防错措施和断气保护,气路断气后,三位五通阀切换到中间封闭状态,防止气缸缩回导致托盘松脱,确保操作安全性。
10.下面结合附图对本发明做进一步说明。
附图说明
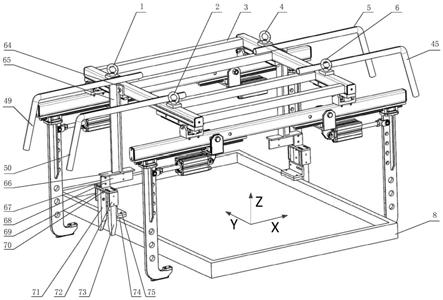
11.图1为吊装夹紧装置三维结构正视示意图。
12.图2为吊装夹紧装置三维结构仰视示意图。
13.图3为吊装夹紧装置的正视图。
14.图4为吊装夹紧装置的左视图。
15.图5为吊装夹紧装置的右视图。
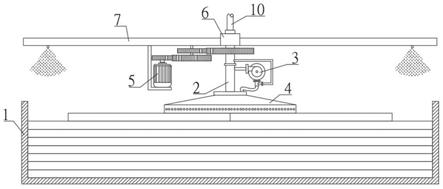
16.图6为气动控制系统的原理图。
具体实施方式
17.下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.在本技术的描述中,需要说明的是,“上”、“下”、“前”、“后”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变。
19.结合图1,一种吊装夹紧装置,包括第一把手5、第二把手45、第三把手49、第四把手50、框架3、第一支架52、第二支架52、夹紧机构、定位机构和气路控制系统。第一把手5和第二把手45安装在框架3一侧,第三把手49、第四把手50安装在框架3另一侧,便于人工操作;框架3上方一侧配置第一吊环1、第二吊环2,另一侧配置第三吊环4、第四吊环6,与车间内现有的升降装置连接,便于z轴方向上的半自动升降吊装,框架3下方安装第一支架52、第二支架52、夹紧机构和定位机构,第一支架52和第二支架52与框架3两侧连接,实现托盘8的预定位和气动夹紧。该吊装夹紧机构可根据托盘尺寸调整夹持尺寸,提高客户托盘不同外形尺寸的适用范围,同时气路控制系统采用防错措施和断气保护,确保托盘夹持安全、
20.结合图1、图2,夹紧机构包括x轴方向调整夹持机构和y轴方向调整机构。x轴方向调整夹持机构包括四套x轴方向子调整机构,第一套x轴方向子调整机构包括第一夹爪16、第一滑块17、第二滑块61、第一导轨18、第一安装支架23和第一销56。第一导轨18安装在第一支架52上。第一夹爪16安装在第一滑块17上,第一安装支架23安装在第二滑块61上,第一滑块17和第二滑块61在第一导轨18上自由滑动。第一气缸19底座与第一安装支架23连接,输出端伸缩杆与第一夹爪16连接。第一气缸19通过第一销56插入第一支架52上对应孔实现第一安装支架23在不同位置的调整定位。当第一气缸19切换输入气路时,第一夹爪16实现往复运动。同理,第二套x轴方向子调整机构包括第二夹爪34、第三滑块33、第四滑块60、第二导轨32、第二安装支架30和第二销54。第二导轨32安装在第一支架52上。第二夹爪34安装在第三滑块33上,第二安装支架30安装在第四滑块60上,第三滑块33和第四滑块60在第二导轨32上自由滑动。第二气缸31底座与第二安装支架30连接,输出伸缩杆与第二夹爪34连接。第二气缸31通过第二销54插入第一支架52上对应孔实现第二安装支架30在不同位置的调整定位。当第二气缸31切换输入气路时,第二夹爪34实现往复运动。同理,第三套x轴方向子调整机构包括第三夹爪11、第五滑块10、第六滑块59、第三导轨9、第三安装支架35和第三销55。第三导轨9安装在第二支架51上。第三夹爪11安装在第五滑块10上,第三安装支架35安装在第六滑块59上,第五滑块10和第六滑块59在第三导轨9上自由滑动。第三气缸12底座与第三安装支架35连接,输出伸缩杆与第三夹爪11连接。第三气缸12通过第三销55插入第一支架52上对应孔实现第三安装支架35在不同位置的调整定位。当第三气缸12切换输入气路时,第三夹爪11实现往复运动。同理,第四套x轴方向子调整机构包括第四夹爪7、第七滑
块39、第八滑块62、第四导轨38、第四安装支架36和第四销58。第四导轨38安装在第二支架51上。第四夹爪7安装在第七滑块39上,第四安装支架36安装在第八滑块62上,第七滑块39和第八滑块62在第四导轨38上自由滑动。第四气缸37底座与第四安装支架36连接,输出伸缩杆与第四夹爪7连接。第四气缸37通过第四销58插入第二支架51上对应孔实现第四安装支架36在不同位置的调整定位。当第四气缸37切换输入气路时,第四夹爪7实现往复运动。
21.结合图1、图2,y轴方向调整机构包括四套y轴方向子调整机构。第一套y轴方向子调整机构包括第九滑块20、第五导轨21、第五安装支架22和第五销63。第一支架52与第五安装支架22连接,第五安装支架22安装在第九滑块20上,第九滑块20与第五导轨21滑动连接;第五导轨21安装在框架3上;第一支架52通过第五销63插入框架3上对应孔实现第一支架52在不同位置的调整定位。同理,第二套y轴方向子调整机构包括第十滑块28、第六导轨29、第六安装支架27和第六销53。第一支架52与第六安装支架27连接,第六安装支架27安装在第十滑块28上,第六导轨29安装在框架3上。第一支架52通过第六销53插入框架3上对应孔实现第一支架52在不同位置的调整定位。同理,第三套y轴方向子调整机构包括第十一滑块14、第七导轨15、第七安装支架13和第七销64。第二支架51与第七安装支架13连接,第七安装支架13安装在第十一滑块14上,第七导轨15安装在框架3上。第二支架51通过第七销64插入框架3上对应孔实现第二支架51在不同位置的调整定位。同理,第四套y轴方向子调整机构包括第十二滑块25、第八导轨26、第八安装支架24和第八销57。第二支架51与第八安装支架24连接,第八安装支架24安装在第十二滑块25上,第八导轨26安装在框架3上。第二支架51通过第八销57插入框架3上对应孔实现第二支架51在不同位置的调整定位。
22.结合图3、图4、图5,定位机构包括左定位机构和右定位机构。左定位机构包括左定位块40、第一蝶形螺栓47和第二蝶形螺栓48。左定位块40包括第一连接板64、第一竖板65、第一横板66、第二连接板67、第三连接板68、第一l型板69、第一固定板70、第二l型板72、第一导向柱71、第二导向柱73、第三l型板75和第一缓冲块74,第一连接板64、第一竖板65、第一横板66和第二连接板67依次连接焊接成第一结构件,第三连接板68、第一l型板69、第一固定板70和第二l型板72依次连接焊接成第二结构件,第三连接板68和第一固定板70连接,第一l型板69和第二l型板72位于第一固定板70左、右两侧,第一结构件的第二连接板67与第二结构件的第三连接板68通过螺栓连接,第一导向柱71、第二导向柱73固定在第二结构件的第一固定板70上,位于第一l型板69和第二l型板72之间,第三l型板75固定在第一导向柱71和第二导向柱73的侧面,第一缓冲块74固定在第三l型板75的下侧。左定位块40的第一连接板64通过第一蝶形螺栓47、第二蝶形螺栓48与框架3上第一长圆孔46连接,通过第一长圆孔46可调整左定位块40在框架3上的相对位置。左定位块40下端与托盘8接触时,夹爪伸入端恰好低于托盘8下表面,实现夹紧前的预定位动作。
23.同理,右定位机构包括右定位块41、第三蝶形螺栓42和第四蝶形螺栓43,右定位块41包括第四连接板77、第二竖板78、第二横板79、第五连接板80、第六连接板81、第四l型板76、第二固定板82、第五l型板83、第三导向柱84、第四导向柱87、第六l型板85和第二缓冲块86,第四连接板77、第二竖板78、第二横板79和第五连接板80焊接成第三结构件,第六连接板81、第四l型板76、第二固定板82和第五l型板83焊接成第四结构件,第三结构件的第五连接板80与第四结构件的第六连接板81通过螺栓连接,第三导向柱84、第四导向柱87固定在第四结构件的第二固定板82上,第六l型板85固定在第三导向柱84和第四导向柱87的侧面,
第二缓冲块86固定在第六l型板85的下侧。右定位块41的第四连接板77通过第三蝶形螺栓42、第四蝶形螺栓43与框架3上第二长圆孔44连接,通过长圆孔44可调整右定位块41在框架3上的相对位置。右定位块41下端与托盘8接触时,夹爪伸入端恰好低于托盘8下表面,然后夹紧机构在可预见确定位置实现托盘夹持动作。
24.结合图6,气路控制系统安装在框架3上,气路控制系统包括气路以及安装在气路上的节流阀、气动二联件、按钮开关阀、拨动开关阀、三位五通阀和第一气缸19、第二气缸31、第三气缸12、第四气缸37。节流阀安装在气路入口端,可调节气源入口的压力值;气动二联件可显示气路压力值、实现压力恒定和空气除湿;按钮开关阀和拨动开关阀为三位五通阀的先导控制阀;三位五通阀可控制第一气缸19、第二气缸31、第三气缸12、第四气缸37的伸缩杆伸出或缩回,气缸缩回时夹紧机构夹紧托盘8,气缸伸出时夹紧机构松开托盘8。气动控制原理:压缩空气通过气源入口经过节流阀和气动二联件,然后分为两路,一路经过三位五通阀、第一气缸19、第二气缸31、第三气缸12和第四气缸37,构成动作回路,另一路经过按钮开关阀、拨动开关阀成为三位五通阀的先导控制回路。三位五通阀同时控制第一气缸19、第二气缸31、第三气缸12和第四气缸37并实现四个伸缩杆的同时伸出和缩回。当拨动开关阀右位接通时,三位五通阀左位接通,第一气缸19、第二气缸31、第三气缸12和第四气缸37的伸缩杆均缩回,此时夹紧机构夹紧托盘8;当按钮开关阀上位接通且拨动开关阀左位接通,三位五通阀右位接通,第一气缸19、第二气缸31、第三气缸12和第四气缸37的伸缩杆均伸出,此时夹紧机构松开托盘8;四个气缸的伸出由拨动开关阀和按钮开关阀同时控制,防止操作者误动作,气缸缩回由拨动开关阀单独控制。气路控制系统还具有断气保护功能,气路断气后,三位五通阀切换到中间封闭状态,防止气缸缩回导致需要夹持的托盘8松脱。
25.所述气路控制系统设计充分考虑防错设计和断气保护,工人在夹紧托盘时仅需操作一个按钮开关阀,但在松开托盘时,工人需要操作拨动开关后再操作按钮开关阀,夹紧机构才会松开托盘,防止工人的误操作导致托盘意外掉落,确保操作安全性。气路控制系统还具有断气保护功能,气路断气后,三位五通阀切换到中间封闭状态,防止气缸缩回导致需要夹持的托盘8松脱。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。