1.本发明涉及机械手技术领域,尤其是一种轻便型吸附式机械手。
背景技术:
2.柔性电路板,行业内俗称fpc,是用柔性的绝缘基材(主要是聚酰亚胺或聚酯薄膜)制成的印刷电路板,具有许多硬性印刷电路板不具备的优点。
3.在fpc生产过程中,常用到机械手将工件从上一工位移送至下一工位上,为了满足实际生产高效便捷的需求,机械手也不断改进,专利号为cn212684004u公开了一种用于吸附柔性电路板的机械手,该机械手体积庞大,在设备整机安装时及其不便利,而现有的机械手大都为此类型设计,其升降结构需要有竖直的滑杆作为滑动的支撑,这样则导致整个柔性电路板加工设备极其庞大,导致厂家的生产成本增加,同时也不利于工人的组装。
4.为此,有必要提出一种轻便型吸附式机械手来解决上述问题。
技术实现要素:
5.为了解决上述问题,本发明提出一种轻便型吸附式机械手来解决上述问题。
6.本发明通过以下技术方案实现的:
7.本发明提出一种轻便型吸附式机械手,包括支撑架、第一驱动装置、第一折叠组件、第二驱动装置、第二折叠组件、维持组件和吸附臂,所述第一驱动装置固定连接于所述支撑架一端,所述第二驱动装置固定连接于所述支撑架另一端,所述第一折叠组件一端固定连接于所述第一驱动装置的转轴上,所述第一折叠组件的另一端与所述吸附臂转动连接,所述第二折叠组件一端固定连接于所述第二驱动装置的转轴上,所述第二折叠组件的另一端与所述吸附臂转动连接,所述维持组件一端与所述支撑架活动连接,所述维持组件另一端与所述吸附臂滑动连接,所述第一驱动装置与所述第二驱动装置同时且反方向等速转动能够分别带动所述第一折叠组件和所述第二折叠组件折叠或展开以带动所述吸附臂做升降运动,所述第一驱动装置与所述第二驱动装置同时且同方向差速转动能够分别带动所述第一折叠组件和所述第二折叠组件转动以带动所述吸附臂左右移动。
8.进一步的,所述第一折叠组件包括第一连接杆、第二连接杆,所述第一连接杆一端与所述第一驱动装置的转轴固定连接,所述第一连接杆的另一端与所述第二连接杆一端转动连接,所述第二连接杆的另一端与所述吸附臂转动连接。
9.进一步的,所述第二折叠组件包括第三连接杆、第四连接杆,所述第三连接杆一端与所述第二驱动装置的转轴固定连接,所述第三连接杆的另一端与所述第四连接杆一端转动连接,所述第三连接杆的另一端与所述吸附臂转动连接。
10.进一步的,所述维持组件包括第一支撑杆和第二支撑杆,所述第一支撑杆的中心与所述第二支撑杆的中心铰接,所述第一支撑杆的一端、所述第二支撑杆的一端均与所述支撑架滑动连接,所述第一支撑杆的另一端、所述第二支撑杆的另一端均与所述吸附臂滑动连接。
11.进一步的,所述支撑架上设有第一滑轨,所述第一支撑杆和所述第二支撑杆上均设有第一滑块,所述第一滑块与所述第一滑轨滑动连接。
12.进一步的,所述吸附臂上设有第二滑轨,所述第一支撑杆和所述第二支撑杆上均设有第二滑块,所述第二滑块远离所述第一滑块,所述第二滑块与所述第二滑轨滑动连接。
13.进一步的,所述维持组件包括转动件,所述转动件依次贯穿所述第一支撑杆和所述第二支撑杆的中心。
14.进一步的,所述轻便型吸附式机械手包括第三驱动装置、固定架、传动带,所述第三驱动装置固定连接于所述固定架一端,所述第三驱动装置的转轴上设有第一传动轮,所述固定架另一端设有第二传动轮,所述传动带环绕所述第一传动轮和所述第二传动轮并固定连接于所述支撑架表面。
15.进一步的,所述固定架上设有滑动杆,所述支撑架上设有滑动块,所述滑动杆贯穿所述滑动块并与所述滑动块滑动连接。
16.进一步的,所述支撑架两端均设有用于放置所述第一折叠组件、所述第二折叠组件的避让槽。
17.本发明的有益效果:
18.本发明提出一种轻便型吸附式机械手,包括支撑架、第一驱动装置、第一折叠组件、第二驱动装置、第二折叠组件、维持组件和吸附臂,第一驱动装置与第二驱动装置同时且反方向等速转动能够分别带动第一折叠组件和第二折叠组件折叠或展开以带动吸附臂做升降运动,第一驱动装置与第二驱动装置同时且同方向差速转动能够分别带动第一折叠组件和第二折叠组件转动以带动吸附臂左右移动;本轻便型吸附式机械手在设备不运作时收拢在设备上方,对于以往的具有滑杆支撑的机械手而言,其折叠收纳的方式无需对外占用过多的空间,使得设备整体的体积小,更加有利于普及推广;综上所述,本轻便型吸附式机械手轻便实用,有利于厂家普及在设备上。
附图说明
19.图1为本发明提出的轻便型吸附式机械手的整体示意图;
20.图2为本发明提出的轻便型吸附式机械手的立体图;
21.图3为本发明提出的轻便型吸附式机械手的另一角度示意图;
22.图4为图1标号a的局部放大示意图;
23.图5为图1标号b的局部放大示意图;
24.图6为图1标号c的局部放大示意图;
25.图7为图2标号d的局部放大示意图;
26.图8为图3标号e的局部放大示意图;
27.图9为图1标号f的局部放大示意图。
具体实施方式
28.为了更加清楚、完整的说明本发明的技术方案,下面结合附图对本发明作进一步说明。
29.请参考图1
‑
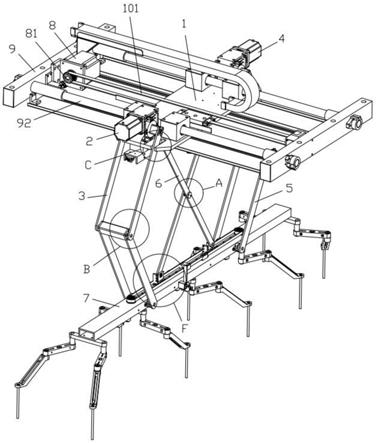
9,本发明提出一种轻便型吸附式机械手,包括支撑架1、第一驱动装置
2、第一折叠组件3、第二驱动装置4、第二折叠组件5、维持组件6和吸附臂7,第一驱动装置2固定连接于支撑架1一端,第二驱动装置4固定连接于支撑架1另一端,第一折叠组件3一端固定连接于第一驱动装置2的转轴上,第一折叠组件3的另一端与吸附臂7转动连接,第二折叠组件5一端固定连接于第二驱动装置4的转轴上,第二折叠组件5的另一端与吸附臂7转动连接,维持组件6一端与支撑架1活动连接,维持组件6另一端与吸附臂7滑动连接,第一驱动装置2与第二驱动装置4同时且反方向等速转动能够分别带动第一折叠组件3和第二折叠组件5折叠或展开以带动吸附臂7做升降运动,第一驱动装置2与第二驱动装置4同时且同方向差速转动能够分别带动第一折叠组件3和第二折叠组件5转动以带动吸附臂7左右移动。
30.在本实施方式中:
31.支撑架1用于为第一驱动装置2、第二驱动装置4提供一个稳固的支撑结构;
32.第一驱动装置2为直流减速电机,用于带动第一折叠组件3转动;
33.第一折叠组件3用于带动吸附臂7移动;
34.第二驱动装置4为直流减速电机,用于带动第二折叠组件5转动;
35.第二折叠组件5用于带动吸附臂7移动;
36.维持组件6用于在吸附臂7升降、左右移动时维持吸附臂7与水平面平行;
37.吸附臂7用于吸附柔性电路板,其下方设有多个吸附嘴;
38.具体的,在未运作时,第一折叠组件3和第二折叠组件5折叠收拢,此时吸附臂7位于设备的最上方,在进行柔性电路板的吸附时,第一驱动装置2与第二驱动装置4同时且反方向等速转动(此时为第一方向)则分别带动第一折叠组件3和第二折叠组件4展开以带动吸附臂7下降,在吸附柔性电路板后,第一驱动装置2与第二驱动装置4同时且反方向等速转动(此时为第二方向,第二方向与第一方向相反)则分别带动第一折叠组件3和第二折叠组件4收缩以带动吸附臂7上升,在吸附臂7向左移动时,第一驱动装置2与第二驱动装置3同时且同方向差速转动(此时为第三方向),即第一驱动装置2正转,第二驱动装置3也正转,且第一驱动装置2的转动速度比第二驱动装置3的转动速度快,此时则带动第一折叠组件3和第二折叠组件5转动以带动吸附臂7向左移动,在吸附臂7向右移动时,第一驱动装置2与第二驱动装置3同时且同方向差速转动(此时为第四方向),即第一驱动装置2反转,第二驱动装置3也反转,且第一驱动装置2的转动速度比第二驱动装置3的转动速度慢,此时则带动第一折叠组件3和第二折叠组件5转动以带动吸附臂7向右移动;
39.本轻便型吸附式机械手在设备不运作时收拢在设备上方,对于以往的具有滑杆支撑的机械手而言,其折叠收纳的方式无需对外占用过多的空间,使得设备整体的体积小,更加有利于普及推广;
40.综上所述,本轻便型吸附式机械手轻便实用,有利于厂家普及在设备上。
41.进一步的,第一折叠组件3包括第一连接杆31、第二连接杆32,第一连接杆31一端与第一驱动装置2的转轴固定连接,第一连接杆31的另一端与第二连接杆32一端转动连接,第二连接杆32的另一端与吸附臂7转动连接;第二折叠组件5包括第三连接杆51、第四连接杆52,第三连接杆51一端与第二驱动装置4的转轴固定连接,第三连接杆51的另一端与第四连接杆52一端转动连接,第三连接杆51的另一端与吸附臂7转动连接。
42.在本实施方式中:
43.第一连接杆31用于与第二连接杆32形成连杆机构,用于带动吸附臂7移动,第一连
接杆31共有2个,第二连接杆32共有2个,第一折叠组件3还包括第一支撑柱,第一支撑柱位于两个第二连接杆32之间,两个第二连接杆32均位于两个第一连接杆31之间;
44.第三连接杆51用于与第四连接杆52形成连杆机构,用于带动吸附臂7移动,第三连接杆51共有2个,第四连接杆52共有2个,第二折叠组件5还包括第二支撑柱,第二支撑柱位于两个第四连接杆52之间,两个第四连接杆52均位于两个第三连接杆51之间。
45.进一步的,维持组件6包括第一支撑杆61和第二支撑杆62,第一支撑杆61的中心与第二支撑杆62的中心铰接,第一支撑杆61的一端、第二支撑杆62的一端均与支撑架1滑动连接,第一支撑杆61的另一端、第二支撑杆62的另一端均与吸附臂7滑动连接;维持组件6包括转动件65,转动件65依次贯穿第一支撑杆61和第二支撑杆62的中心;支撑架1上设有第一滑轨11,第一支撑杆61和第二支撑杆62上均设有第一滑块63,第一滑块63与第一滑轨11滑动连接;吸附臂7上设有第二滑轨71,第一支撑杆61和第二支撑杆62上均设有第二滑块64,第二滑块64远离第一滑块63,第二滑块64与第二滑轨71滑动连接。
46.在本实施方式中:
47.第一支撑杆61与第二支撑杆62形成一个“x”型的支架,在吸附臂7上升时,“x”型的支架撑开,以将吸附臂7维持在原本的位置上,在吸附臂7向左或向右移动时,“x”型的支架则保持不变,以维持吸附臂7与水平面的平行状态;
48.第一滑块63用于为第一支撑杆61与第二支撑杆62提供一个便于滑动的结构;
49.第二滑块64用于为第一支撑杆61与第二支撑杆62提供一个便于滑动的结构;
50.转动件65用于为第一支撑杆61与第二支撑杆62提供一个中心转动的支撑结构;
51.第一滑轨11用于为第一滑块63提供一个滑动的支撑结构;
52.第二滑轨71用于为第二滑块64提供一个滑动的支撑结构;
53.具体的,吸附臂7上设有两个定滑轮,一条传动带环绕在两个定滑轮上,一个第二滑块64固定在传动带的一侧,另一个第二滑块64固定在传动带的另一侧,由于传动带的限制,“x”型的支架撑开或收拢时,两个第二滑块64则会同时并同速度相向而行,使得“x”型的支架始终保持在正中央的位置。
54.进一步的,轻便型吸附式机械手包括第三驱动装置8、固定架9、传动带101,第三驱动装置8固定连接于固定架9一端,第三驱动装置8的转轴上设有第一传动轮81,固定架9另一端设有第二传动轮91,传动带101环绕第一传动轮81和第二传动轮91并固定连接于支撑架1表面;固定架9上设有滑动杆92,支撑架1上设有滑动块12,滑动杆92贯穿滑动块12并与滑动块12滑动连接;支撑架1两端均设有用于放置第一折叠组件3、第二折叠组件5的避让槽13。
55.在本实施方式中:
56.第三驱动装置8为直流电机,用于带动传动带101移动,从而带动支撑架1滑动;
57.第一传动轮81用于与传动带101适配并将第三驱动装置8的转动动力传递至传动带101上;
58.固定架9用于为第三驱动装置8以及支撑架1提供一个稳固的支撑结构;
59.第二传动轮91用于与传动带101适配并绷紧传动带101;
60.滑动杆92用于为滑动块12提供一个滑动的支撑结构;
61.传动带101用于将支撑架1带动滑动;
62.滑动块12用于为支撑架1提供一个滑动的支撑结构;
63.避让槽13用于为第一折叠组件3、第二折叠组件5在转动时提供一个避让的空间。
64.当然,本发明还可有其它多种实施方式,基于本实施方式,本领域的普通技术人员在没有做出任何创造性劳动的前提下所获得其他实施方式,都属于本发明所保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。